目录
任务点
- 已完成
-
-
框架解读
-
-
-
固件编译
-
-
-
接口分析及添加
-
- 计划中
-
- 已有驱动分析
-
- 移植自定义驱动
-
- 精简固件
-
- 性能优化
一.框架
1.目录结构
这个版本库的主要组件:
- py/ --核心Python实现,包括编译器、运行时和核心库
- mpy-cross/ --MicroPython 交叉编译器,用于将脚本变成预编译的字节码。
- ports/unix/ --运行在 Unix 上的 MicroPython 版本。
- - stm32/ --在PyBoard和STM32板上运行的MicroPython版本(使用ST的CubeHAL驱动程序)
- - minimal/ -- 一个最小的MicroPython版本。如果你想把MicroPython移植到其他微控制器上,就从这个开始。
- tests/ -- 测试框架和测试脚本。
- docs/ -- 用户文档
- extmod/ 一些不需要在 Core 中的抽象 C 接口代码
- lib/ 给 port 用的各自平台的 SDK 依赖库,可能在里面,也可能在外面,并不重要
- drivers/通过软实现的硬件驱动,基于 py 的架构使用标准 C 实现的 Python 模块(C + Python),和芯片自己提供的 SDK 略微不同,有较大的兼容性。
附加组件:
- ports/
- - bare-arm/ -- 适用于 ARM MCU 的最低版本 MicroPython。主要用于控制代码大小.
- - teensy/ -- 运行在 Teensy 3.1 上的 MicroPython 版本 (初始版本,但可以使用).
- - pic16bit/ -- 用于 16 位 PIC 微控制器的 MicroPython 版本.
- - cc3200/ -- 运行在 TI CC3200 上的 MicroPython 版本.
- - esp8266/ -- 运行在乐鑫的ESP8266 SoC上的MicroPython版本.
- - esp32/ --运行在乐鑫的ESP32 SoC上的MicroPython版本.
- - nrf/ --运行在Nordic的nRF51和nRF52 MCU上的MicroPython版本
- extmod/ -- 用C语言实现的附加(非核心)模块.
- tools/ -- 各种工具,包括pyboard.py模块.
- examples/ -- 一些Python脚本示例.
2.tests文件夹
-
run-tests-exp.sh run-tests-exp.py run-tests 自动化的测试接口脚本,通过这样的方式可以让 micropython 解释器进行接口覆盖性测试。将在 repl 执行的 Python code 结果返回存到 .exp(example)下进行测试核对。
3.接口
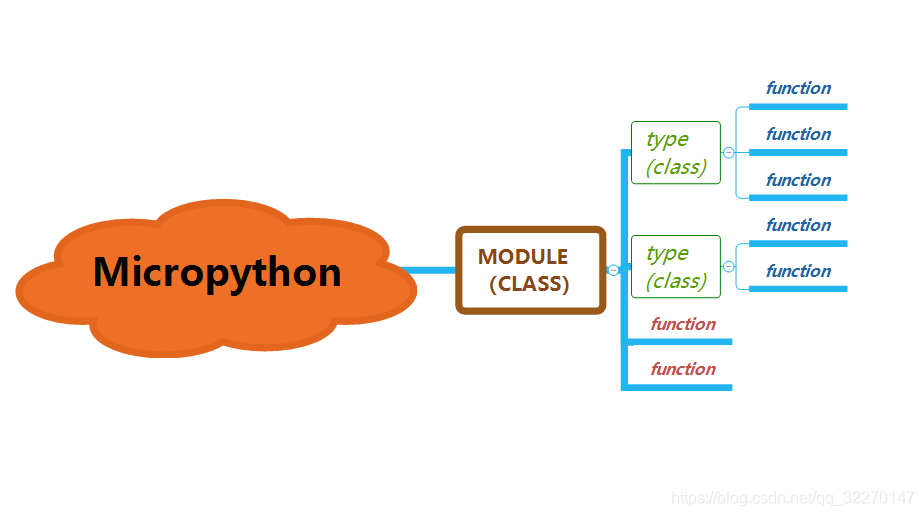
接口有3大类
- module(class) 例如:machine
-
- type(class) 例如:machine.Pin machine.UART
-
-
- function(function) 例如:machine.Pin.value
-
二.编译固件
1.编译环境
- Linux (UbuntuServer 18.04 LTS)
- GCC ARM-GCC 编译链
-
apt-get install gcc
-
apt-get install gcc-arm-none-eabi
- make 工具
-
apt-get install make
2 编译Micropython自带的交叉编译器
make -C mpy-cross
***mpy-cross在主目录下 ***
3 Build and Upgrade
- 1.进入ports/stm32/ 文件夹下
- 2.
make submodules获取子模块 - 3.
make BOARD=PYBV11为给定板编译 - 4.生成固件在
build-PYBV11/下firmware.dfu - 5.使用Dfuse在winodws上升级 下载链接
三.添加C接口 module
1.ports/stm32 新建modtest.c,用户自定义模块主文件文件名自定
1.1代码实现
#include "stdio.h"
#include "py/obj.h"
#include "py/runtime.h"
#include "py/builtin.h"
//定义的modtest全局字典,之后我们添加type和function就要添加在这里
STATIC const mp_rom_map_elem_t modtest_globals_table[] = {
{MP_ROM_QSTR(MP_QSTR___name__), MP_ROM_QSTR(MP_QSTR_modtest)}, //这个对应python层面的__name__ 属性
};
//这个可以认为是把modtest_globals_table注册到 mp_module_modtest.globals里面去
STATIC MP_DEFINE_CONST_DICT(mp_module_modtest_globals, modtest_globals_table);
//这个是定义一个module类型
const mp_obj_module_t mp_module_modtest = {
.base = {&mp_type_module},
.globals = (mp_obj_dict_t *)&mp_module_modtest_globals,
};
1.2.模型解释
- 全局定义字典
mp_rom_map_elem_t modtest_globals_table[] //定义的modtest全局字典,之后我们添加type和function就要添加在这里
- 注册模块
MP_DEFINE_CONST_DICT(mp_module_modtest_globals, modtest_globals_table) //这个可以认为是把modtest_globals_table注册到 mp_module_modtest.globals里面去
- 定义module类型
mp_obj_module_t mp_module_modtest //定义一个module类型
2.modules.c 添加到Makefile相应位置
3.module注册到micropython
我们要把我们定义的module注册到micropython中去,这个是在mpconfigport.h文件中修改
extern const struct _mp_obj_module_t mp_module_machine;
extern const struct _mp_obj_module_t mp_module_network;
extern const struct _mp_obj_module_t mp_module_onewire;
extern const struct _mp_obj_module_t mp_module_modtest; //这个是我们添加的,需要声明一下应用外部的struct
#define MICROPY_PORT_BUILTIN_MODULES \
{ MP_ROM_QSTR(MP_QSTR_umachine), MP_ROM_PTR(&machine_module) }, \
{ MP_ROM_QSTR(MP_QSTR_pyb), MP_ROM_PTR(&pyb_module) }, \
STM_BUILTIN_MODULE \
{ MP_ROM_QSTR(MP_QSTR_uos), MP_ROM_PTR(&mp_module_uos) }, \
{ MP_ROM_QSTR(MP_QSTR_utime), MP_ROM_PTR(&mp_module_utime) }, \
{ MP_ROM_QSTR(MP_QSTR_modtest), MP_ROM_PTR(&mp_module_modtest) }, \ //这个是我们添加的modtest
SOCKET_BUILTIN_MODULE \
NETWORK_BUILTIN_MODULE \
{ MP_ROM_QSTR(MP_QSTR__onewire), MP_ROM_PTR(&mp_module_onewire) }, \
找到MICROPY_PORT_BUILTIN_MODULES 定义的地方按照格式添加我们定义的module
MP_QSTR_modtest这个名字要改成自定义的,MP_QSTR_这个一定要保留,后面的modtest就是在python中显示的module名字
四.添加C接口 给module添加function
在 第二步-添加module中已经添加好了一个模块,但是没有实现任何功能,这一节为module添加function实现功能。
函数是分为有参数和无参数的,一下两部分分别为有参数和无参数的添加方式
无参数函数
1.添加无参数的函数,我们给他起名为function1(这个名字是最终在python层面显示的)
//这是我们定义函数
STATIC mp_obj_t modtest_function1()
{
printf("This is motest function :function1\n");
return mp_const_none;//不需要返回数据就返回它
}
//每一个我们和python接口的函数都需要使用这个宏定义
STATIC const MP_DEFINE_CONST_FUN_OBJ_0(modtest_obj_function1,modtest_function1);
STATIC const mp_rom_map_elem_t modtest_globals_table[] = {
{MP_ROM_QSTR(MP_QSTR___name__), MP_ROM_QSTR(MP_QSTR_modtest)},
{MP_ROM_QSTR(MP_QSTR_function1), MP_ROM_PTR(&modtest_obj_function1)}, //这条是我们添加的,把新建的函数注册进modtest里面去
};
所有我们和python对接的函数都要是返回mp_obj_t类型的 ,如果该函数实际不需要返回任何数据我们最后就调用return mp_const_none;
比较重要的一条就是这个了
STATIC const MP_DEFINE_CONST_FUN_OBJ_0(modtest_obj_function1,modtest_function1);
micropython针对不同参数类型提供了好几个这种类似的宏定义。这里不深做解释,我们是用的MP_DEFINE_CONST_FUN_OBJ_0就是代表改函数是0个参数的。
最后一步就是把我们定义的function注册进modtest_globals_table中去,和前面注册module类型类似,MP_QSTR_function1 该名称中的function1会作为我们在pythonfunction显示的名字。
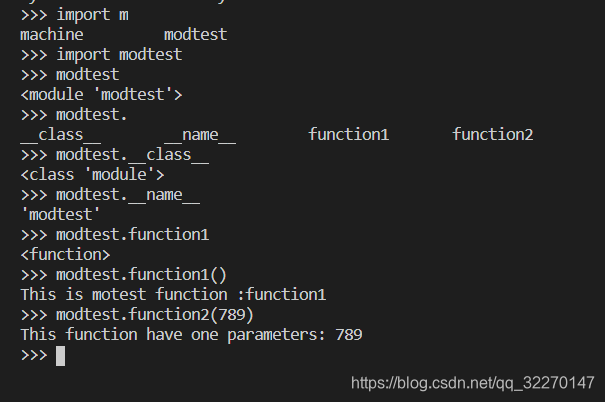
python层我们调用 modtest.function1()就可以执行到我们函数中打印的内容
有参数函数
1.加一个带有一个参数的函数接口
//参数类型要用mp_obj_t
STATIC mp_obj_t modtest_function2(mp_obj_t data)
{
printf("This function have one parameters: %d\n",mp_obj_get_int(data)); //请注意这里从参数中提取整数使用的方法
return mp_const_none; //同样没有返回值
}
//这里使用的宏定义和面的名称不一样,OBJ_1区别
STATIC const MP_DEFINE_CONST_FUN_OBJ_1(modtest_obj_function2,modtest_function2);
STATIC const mp_rom_map_elem_t modtest_globals_table[] = {
{MP_ROM_QSTR(MP_QSTR___name__), MP_ROM_QSTR(MP_QSTR_modtest)},
//把新定义的函数注册进modtest_globals_table
};
定义的函数我们添加了一个mp_obj_t类型的参数,实际上mp_obj_t就是一个空指针,这样他可以用来传递任何类型,不管是整数,字符串都可以。具体是什么类型我们在函数内部用mp提供的对应的方法把他提取出来,比如这里认为传进来的是一个int型的,就是用mp_obj_get_int(data) 来提取出来整型。当然micopython还提供了很多其他类似的,需要注意一下是提取字符串的稍微形式上看起来有点区别:mp_obj_str_get_str(arg)。
关于MP_DEFINE_CONST_FUN_OBJ_1,官方给了7种接口,改最后的数字即可。
编译
演示