文献下载链接:
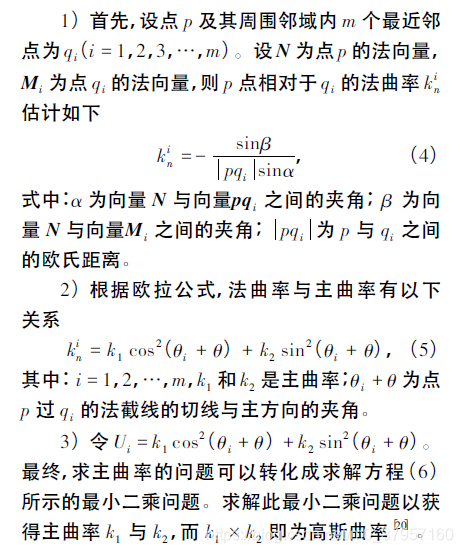
简单说明原理就是:用一个点邻域内点的法向量计算该点的法曲率,根据欧拉公式得法曲率与主曲率的关系,最后用最小二乘优化得到主曲率。(通过拟合正截面曲率估算三维点云曲面的曲率,正截面曲率就是法曲率)
不管他概念说的有多抽象,反正最终处理的只是数学上定义的xyz的三维坐标而已。
问:就这个啊,i表示p点周围的邻域是从1到m,那么n没有具体含义就是表示与法线有关的计算?,n是法线我知道,我的意思就是这里的下标n没有变化,不像i一样从1到m的变化,n就一直是n,是为了说明法曲率的计算是与法线有关的?
答:是的。
问:一个P点和其邻域内的一个点计算出来的
是法曲率,这个计算出来的法曲率是P点的还是怎么理解?
答:是P点的。
问:表示p与邻域内的第1个点的法曲率,
表示k与邻域第二个点的法曲率,即就是p有多少个邻域,那么p点就有多少个法曲率?
答:原理上是用邻域的一个点就可以表示p点的法曲率,因为有误差之类的存在,所以用邻域内k个点进行最小二成优化来得到p点的曲率。
选邻域内多个点主要就是为了最小二乘寻优。
问:法曲率是p点的,那么k1和k2分别是哪个点的?
答:P点的。
问:最后获得的特征值k1和k2就是主曲率?为啥有两个主曲率?k1xk2是高斯曲率,一个高斯曲率?
答:数学上就是这么定义的!!!所以计算的k1和k2就是分别表示最大主曲率和最小主曲率