串口DMA系列文章一共两篇,分别是利用DMA + 空闲中断实现不定长数据的收发,另一篇是使用DMA中断实现定长数据的收发,文章链接如下:
01 STM32F103 串口DMA + 空闲中断 实现不定长数据收发
02 STM32F103 串口 +DMA中断实现数据收发
文章目录
DMA(Direct Memory Access,直接存储器访问) 是所有现代电脑的重要特色,它允许不同速度的硬件装置来沟通,而不需要依赖于 CPU 的大量中断负载。否则,CPU 需要从来源把每一片段的资料复制到暂存器,然后把它们再次写回到新的地方。在这个时间中,CPU 对于其他的工作来说就无法使用。
关于DMA的基础知识请参考文章 https://blog.csdn.net/gdjason/article/details/51019219 ,个人觉得博主的文章最后代码部分写的有点乱,再次做整理记录。串口DMA可以有两种中断触发方式,一种是使用STM32的 IDLE 空闲中断方便接收不定长的数据,使用中也经常采用这种方式,第二种是使用DMA自身的传输完成中断,这两种方式在发送完成后均能产生发送完成中断,不同的地方是空闲中断方便接收不定长的数据,而DMA传输完成中断只有接收到定义好的长度的数据后才会产生接收中断。
1. 空闲中断
本文采用485总线来实验串口的DMA空闲中断,实现数据的收发测试。485的不同之处是多了一个使能引脚,该引脚是高电平使能发送,低电平使能接收,因此是半双工的通信,其他的和串口一致。本例使用STM32F103的串口1,TX引脚是PA9;RX引脚是PA10,485的使能引脚是PD1。大家在使用时板子上的串口功能测试时无需考虑485的使能引脚,本文中关于485的部分都用 /**** RS485 ****/标识出来,下面是代码部分。
1.1 uart_dma.c
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_usart.h"
#include "stm32f10x_dma.h"
#include "misc.h"
#include "systick.h" // 利用嘀嗒计时器实现了ms级的死等延时,用于切换485收发功能使用,实际项目中不能用死等延时
#include "uart_dma.h"
uint8_t uart1RecvData[32] = {
0}; // 接收数据缓冲区
uint8_t uart1RecvFlag = 0; // 接收完成标志位
uint8_t uart1RecvLen = 0; // 接收的数据长度
uint8_t uart1SendData[32] = {
0}; // 发送数据缓冲区
uint8_t uart1SendFlag = 0; // 发送完成标志位
/* 串口1 GPIO引脚初始化 */
void Uart1GpioInit(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // 使能GPIOA时钟
/************ ↓ RS485 相关 ↓ ************/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); // 使能GPIOD时钟
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP; // 输入输出使能引脚 推挽输出
GPIO_InitStruct.GPIO_Pin = UART1_EN_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(UART1_EN_PORT, &GPIO_InitStruct); // PD1
Uart1RxEnable(); // 初始化接收模式
/************ ↑ RS485 相关 ↑ ************/
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // TX 推挽输出
GPIO_InitStruct.GPIO_Pin = UART1_TX_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(UART1_TX_PORT, &GPIO_InitStruct); // PA9
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU; // RX上拉输入
GPIO_InitStruct.GPIO_Pin = UART1_RX_PIN;
GPIO_Init(UART1_RX_PORT, &GPIO_InitStruct); // PA10
}
/************ ↓ RS485 相关 ↓ ************/
/* 使能485发送 */
void Uart1TxEnable(void)
{
GPIO_WriteBit(UART1_EN_PORT, UART1_EN_PIN, Bit_SET); // 485的使能引脚,高电平为使能发送
Delay_ms(5);
}
/* 使能485接收 */
void Uart1RxEnable(void)
{
GPIO_WriteBit(UART1_EN_PORT, UART1_EN_PIN, Bit_RESET); // 485的使能引脚,低电平为使能发送
Delay_ms(5);
}
/************ ↑ RS485 相关 ↑ ************/
/* 串口1配置 9600 8n1 */
void Uart1Config(void)
{
USART_InitTypeDef USART_InitStruct; // 串口配置
NVIC_InitTypeDef NVIC_InitStructure; // 中断配置
DMA_InitTypeDef DMA_InitStruct; // DMA 配置
USART_DeInit(USART1); // 寄存器恢复默认值
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); // 使能串口时钟
/* 串口参数配置 */
USART_InitStruct.USART_BaudRate = BAUD_RATE; // 波特率:9600
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 无流控
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; // 收发
USART_InitStruct.USART_Parity = USART_Parity_No; // 无校验位
USART_InitStruct.USART_StopBits = USART_StopBits_1; // 1个停止位
USART_InitStruct.USART_WordLength = USART_WordLength_8b; // 8个数据位
USART_Init(USART1, &USART_InitStruct);
USART_Cmd(USART1, ENABLE); // 使能串口
/* 串口中断配置 */
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; // 子优先级
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; // 串口1中断
NVIC_Init(&NVIC_InitStructure); // 嵌套向量中断控制器初始化
USART_ITConfig(USART1, USART_IT_TC, ENABLE); // 使能串口发送中断,发送完成产生 USART_IT_TC 中断
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE); // 使能串口空闲中断,接收一帧数据产生 USART_IT_IDLE 空闲中断
/* 串口DMA配置 */
DMA_DeInit(DMA1_Channel4); // DMA1 通道4,寄存器复位
DMA_DeInit(DMA1_Channel5); // DMA1 通道5,寄存器复位
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); // 使能 DMA1 时钟
// RX DMA1 通道5
DMA_InitStruct.DMA_BufferSize = sizeof(uart1RecvData); // 定义了接收的最大长度
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC; // 串口接收,方向是外设->内存
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable; // 本次是外设到内存,所以关闭内存到内存
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)uart1RecvData;// 内存的基地址,要存储在哪里
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;// 内存数据宽度,按照字节存储
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable; // 内存递增,每次串口收到数据存在内存中,下次收到自动存储在内存的下一个位置
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal; // 正常模式
DMA_InitStruct.DMA_PeripheralBaseAddr = USART1_BASE + 0x04; // 外设的基地址,串口的数据寄存器
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; // 外设的数据宽度,按照字节存储,与内存的数据宽度一致
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 接收只有一个数据寄存器 RDR,所以外设地址不递增
DMA_InitStruct.DMA_Priority = DMA_Priority_High; // 优先级
DMA_Init(DMA1_Channel5, &DMA_InitStruct);
// TX DMA1 通道4
DMA_InitStruct.DMA_BufferSize = 0; // 发送缓冲区的大小,初始化为0不发送
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralDST; // 发送是方向是外设到内存,外设作为目的地
DMA_InitStruct.DMA_MemoryBaseAddr =(uint32_t)uart1SendData; // 发送内存地址,从哪里发送
DMA_Init(DMA1_Channel4, &DMA_InitStruct);
USART_DMACmd(USART1, USART_DMAReq_Tx | USART_DMAReq_Rx, ENABLE);// 使能DMA串口发送和接受请求
DMA_Cmd(DMA1_Channel5, ENABLE); // 使能接收
DMA_Cmd(DMA1_Channel4, DISABLE); // 禁止发送
}
/* 清除DMA的传输数量寄存器 */
void uart1DmaClear(void)
{
DMA_Cmd(DMA1_Channel5, DISABLE); // 关闭 DMA1_Channel5 通道
DMA_SetCurrDataCounter(DMA1_Channel5, sizeof(uart1RecvData)); // 重新写入要传输的数据数量
DMA_Cmd(DMA1_Channel5, ENABLE); // 使能 DMA1_Channel5 通道
}
/* 串口1发送数组 */
void uart1SendArray(uint8_t *arr, uint8_t len)
{
if(len == 0) // 判断长度是否有效
return;
uint8_t sendLen = len>sizeof(uart1SendData) ? sizeof(uart1SendData) : len; // 防止越界
/************ ↓ RS485 相关 ↓ ************/
Uart1TxEnable(); // 使能发送
/************ ↑ RS485 相关 ↑ ************/
while (DMA_GetCurrDataCounter(DMA1_Channel4)); // 检查DMA发送通道内是否还有数据
if(arr)
memcpy(uart1SendData, arr, sendLen);
// DMA发送数据-要先关 设置发送长度 开启DMA
DMA_Cmd(DMA1_Channel4, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel4, sendLen); // 重新写入要传输的数据数量
DMA_Cmd(DMA1_Channel4, ENABLE); // 启动DMA发送
}
1.2 uart_dma.h
#ifndef _UART_DAM_H_
#define _UART_DMA_H_
#include <stdint.h>
#define UART1_TX_PORT GPIOA
#define UART1_TX_PIN GPIO_Pin_9
#define UART1_RX_PORT GPIOA
#define UART1_RX_PIN GPIO_Pin_10
#define UART1_EN_PORT GPIOD
#define UART1_EN_PIN GPIO_Pin_1
#define BAUD_RATE (9600)
extern uint8_t uart1RecvData[32];
extern uint8_t uart1RecvFlag;
extern uint8_t uart1RecvLen;
extern uint8_t uart1SendFlag;
void Uart1GpioInit(void);
void Uart1Config(void);
void uart1DmaClear(void);
void uart1SendArray(uint8_t *arr, uint8_t len);
/************ ↓ RS485 相关 ↓ ************/
void Uart1RxEnable(void);
void Uart1TxEnable(void);
/************ ↑ RS485 相关 ↑ ************/
#endif /* uart_dma.h */
1.3 main.c
#include "uart_dma.h"
#include "misc.h"
int main()
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 设置中断优先级分组
/************ ↓ RS485 相关 ↓ ************/
SysTickInit(); // 嘀嗒计时器初始化,没用485可以省去
/************ ↑ RS485 相关 ↑ ************/
Uart1GpioInit(); // 串口GPIO初始化
Uart1Config(); // 串口和DMA配置
while(1)
{
if(uart1RecvFlag == 1) // 接收到数据
{
uart1RecvFlag = 0; // 接收标志清空
uart1DmaClear(); // 清空DMA接收通道
uart1SendArray(uart1RecvData, uart1RecvLen); // 使用DMA发送数据
memset(uart1RecvData, '\0', sizeof(uart1RecvData)); // 清空接收缓冲区
}
if(uart1SendFlag == 1)
{
uart1SendFlag = 0; // 清空发送标志
Uart1RxEnable(); // 发送完成打开接收
}
}
}
1.4 stm32f10x_it.c
#include "stm32f10x_it.h"
#include "stm32f10x_usart.h"
#include "stm32f10x_dma.h"
#include "uart_dma.h"
void USART1_IRQHandler(void) // 串口1 的中断处理函数
{
uint8_t clear;
if(USART_GetITStatus(USART1, USART_IT_IDLE) != RESET) // 空闲中断
{
clear = USART1->SR; // 清除空闲中断
clear = USART1->DR; // 清除空闲中断
uart1RecvFlag = 1; // 置接收标志位
uart1RecvLen = sizeof(uart1RecvData) - DMA_GetCurrDataCounter(DMA1_Channel5);// 总的buf长度减去剩余buf长度,得到接收到数据的长度
}
if(USART_GetITStatus(USART1, USART_IT_TC) != RESET) // 发送完成
{
USART_ClearITPendingBit(USART1, USART_IT_TC); // 清除完成标记
DMA_Cmd(DMA1_Channel4, DISABLE); // 关闭DMA
uart1SendFlag = 1; // 设置发送完成标志位
}
}
1.5 效果演示
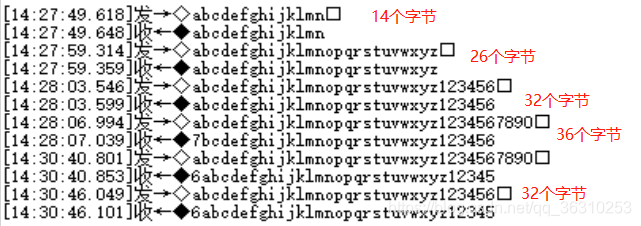
本文使用的是串口采用DMA空闲中断接收不定长的数据,收到后将收到的数据使用DMA发送出去,采用串口调试助手进行调试,效果如下:可以看到当数据超过定义的最大数据(本例是32个字节)后,接收只能接收到32个数据,其他的数据将被丢弃。
1.6 知识补充
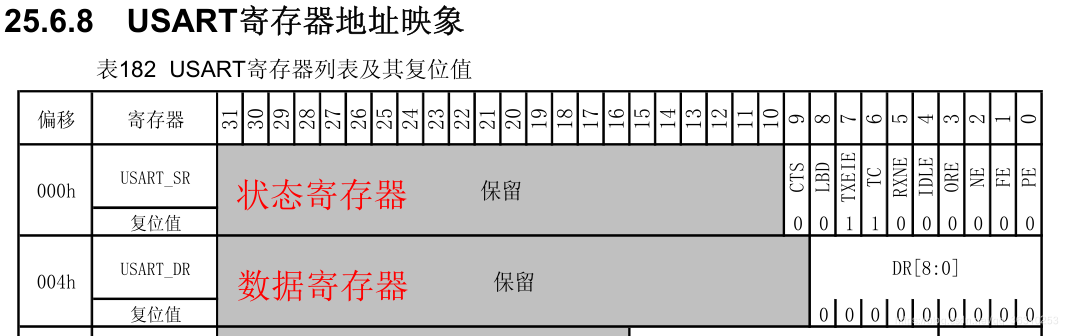
1.6.1 外设的基地址
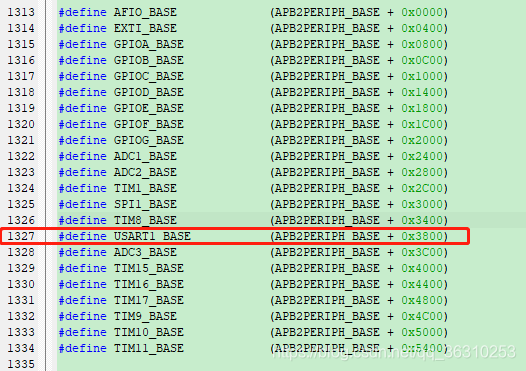
本文外设到基地址定义的是 USART1_BASE + 0x04,为什么是这个呢?查看STM32的参考手册,找到串口章节,查找USART寄存器地址映象如下图:可以看到数据寄存器是串口基地址寄存器偏移 0x04 后的位置。串口1基地址的宏定义可以在 stm32f10x.h 中找到,如下图。
1.6.2 空闲中断清除
产生空闲中断后,先读SR,再读DR可以清除空闲中断标志位,见下图(手册串口章节 25.6.1 状态寄存器(USART_SR))。

1.6.3 DMA传输数量
查看手册,DMA传输数量寄存器里的值表示剩余待传输的字节数,因此在 it.c 中使用 定义的总数-寄存器中的数值=表示收到的个数。这个地方需要特别注意,否则会计算错收到的字节数。
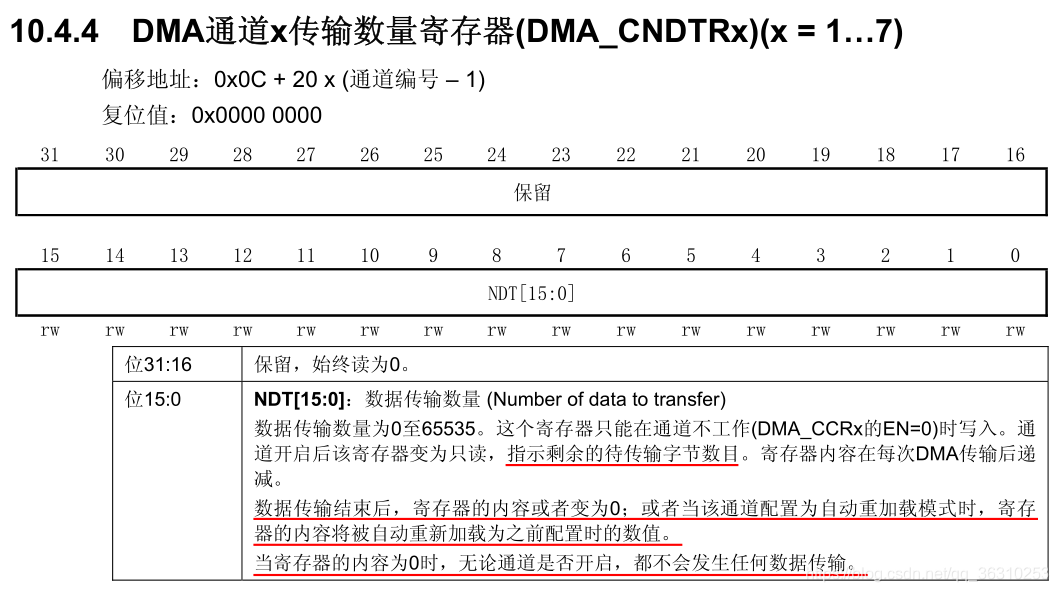
还有一点,每次接收完成之后为了使下次的接收是从内存中的下标0还是存储,需要重新写入要传输的数据数量,否则下次直接接着上次传输的位置开始接收存储,发送时也一样,见代码 uart_dma.c 中的127–129行和149–151行。
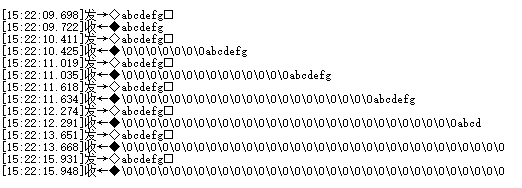
如果注释掉128行,每次不重新写入传输数量寄存器,演示结果如下:从结果可以看出如果注释掉128行,那么DMA往接收缓冲区搬运数据时下标将从上次结束的位置作为起始位置【因为此时传输数量寄存器的值不是0,是32-7】,前面是’/0’ 是因为每次接收完成后都将接收缓冲区清空。所以每次接收一帧数据之后都要将 传输数量寄存器清0,
在DMA学习过程中有什么问题,欢迎一起交流。