使用Setup Assistant配置机械臂
总述
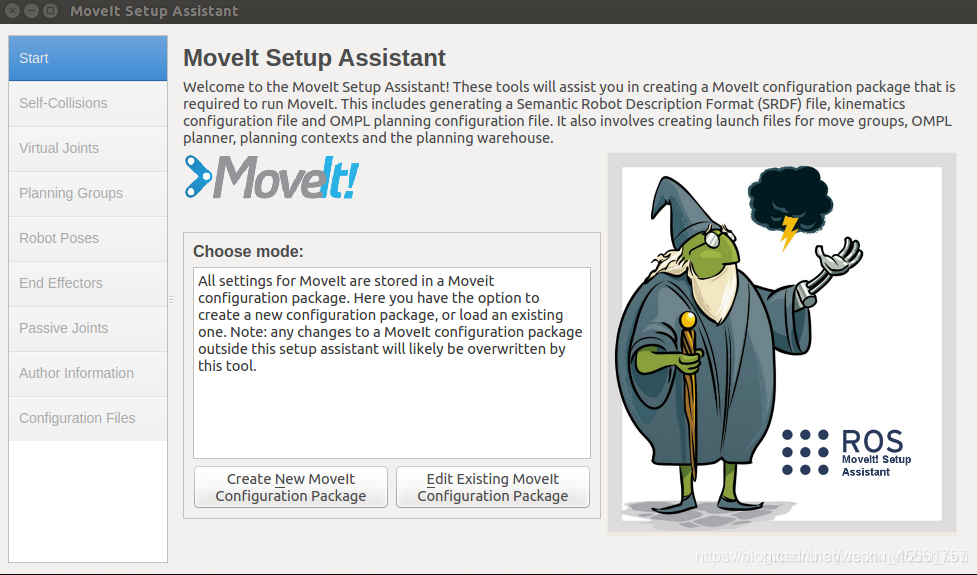
假设使用自己创建的机器人URDF模型,则使用MoveIt!的第一步就是用Setup Assistant工具完成一些配置工作。Setup Assistant会根据用户导入的机器人URDF模型生成SRDF(Semantic Robot Description Format)文件,从而创建一个MoveIt!配置的功能包,完成机器人的配置、可视化和仿真等工作。
1、安装moveit,执行如下命令
sudo apt-get install ros-kinetic-moveit-*
2、运行moveit
启动ROS系统
roscore
打开新的命令终端,启动配置助手
rosrun moveit_setup_assistant moveit_setup_assistant
一、加载机器人URDF模型
点击第一个功能按钮Create New MoveIt Configuration Package,找到自己创建的机器人模型或者已有的机械臂模型;
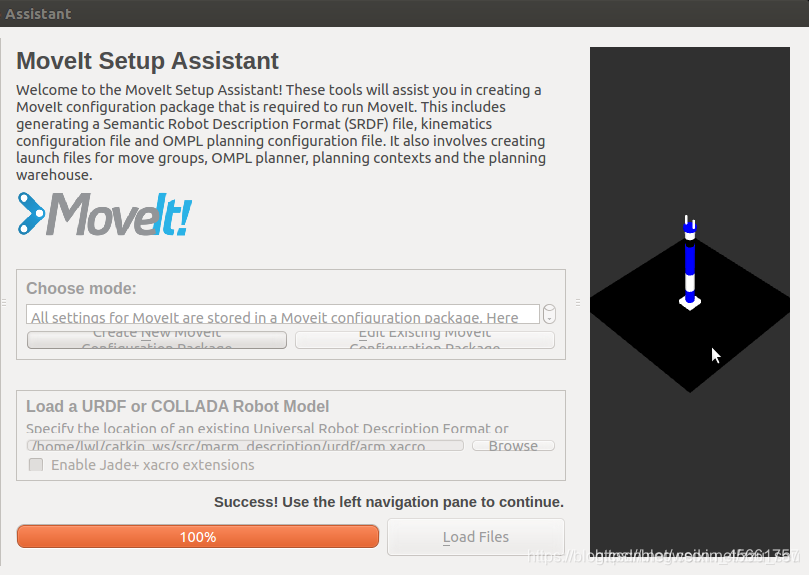
选择机械臂模型文件;
接着点击配置助手右下角的Load Files加载该文件,加载完成后会在右侧出现机器人模型;
二、配置自碰撞矩阵
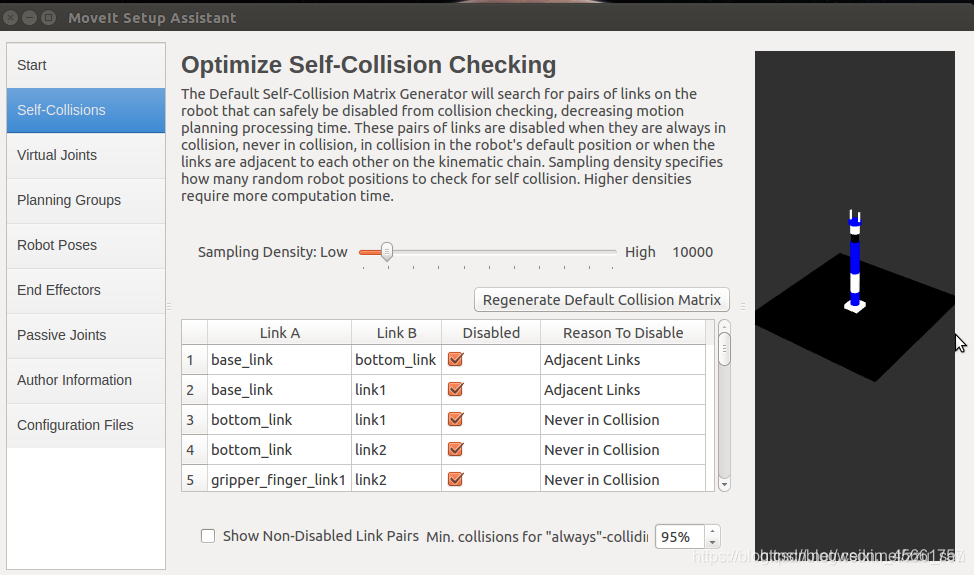
点击左侧列表的第二个(Self-Collisions),设置采样系列的检测点。
MoveIt!允许设置一定数量的随机采样点,根据这些点生成碰撞参数,检测永远不会发生碰撞的link。去检测机械臂的各个关节在运动时是否会发生碰撞:点过多会造成运算速度较慢,点过少会导致参数不完善等问题。默认的采样点个数是10000,这里不做修改,点击中间的Regennerate Default Collision Matrix按钮,自动完成数据的采样和计算。
三、配置虚拟关节
用来定义机械臂与世界坐标系的关系,把机械臂关节固定到某个物体上面,若用不上,直接跳过。
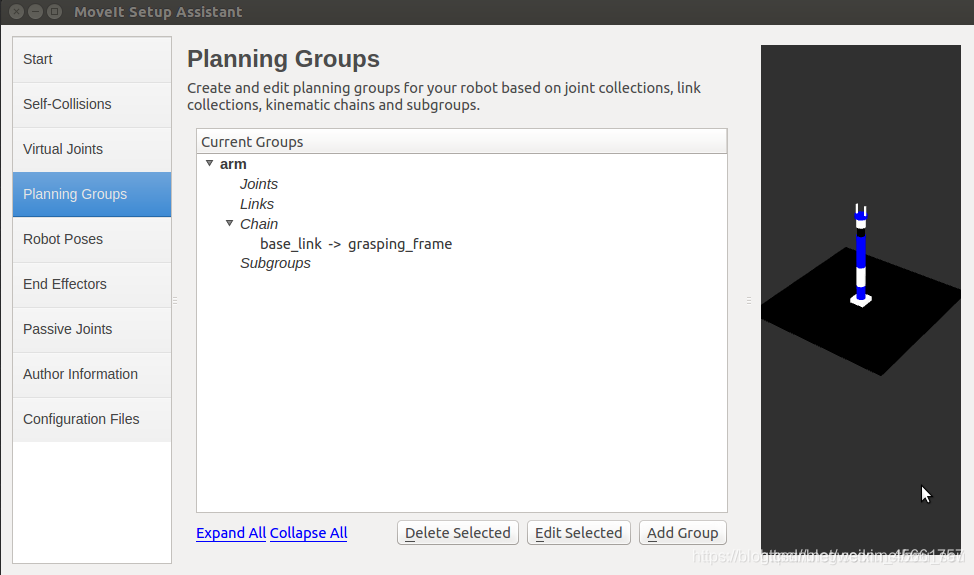
四、创建规划组
点击Planning Groups(运动规划组),是整个配置中最重要的步骤,在这个步骤中可以添加几个规划组,MoveIt的控制都是针对规划组来做控制。这里将机械臂与末端的夹取机构分开进行控制,点击右下角的Add Group按钮。
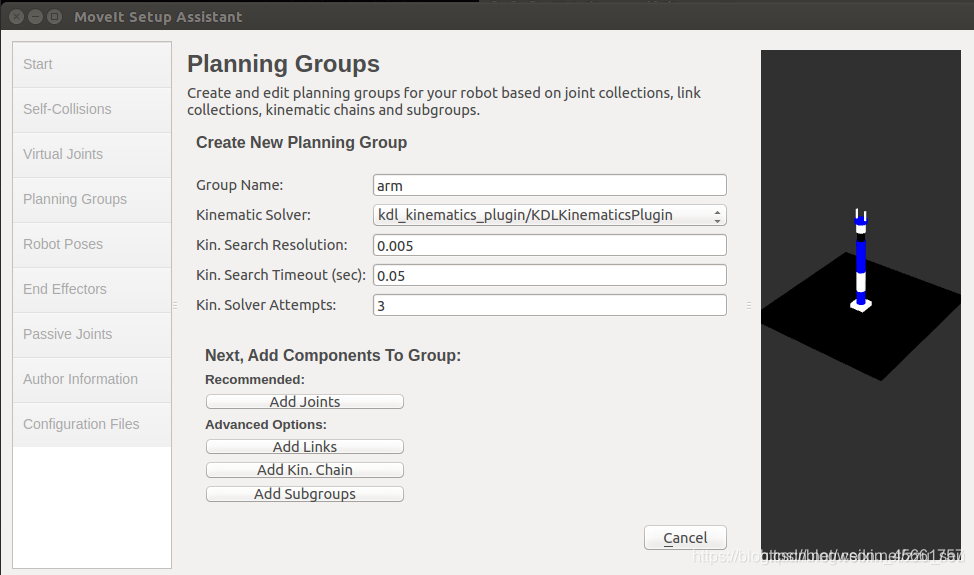
- 第一个参数是规划组的名称
- 第二个参数是配置针对运动规划的运动学求解器,选择的是kdl的运动规划器插件
- 第三个参数是运动估计
- 第四个参数是超时时间
- 第五个参数是求解失败后重新弄尝试求解的次数
点击Add Kin.Chain配置用到的link的链条:
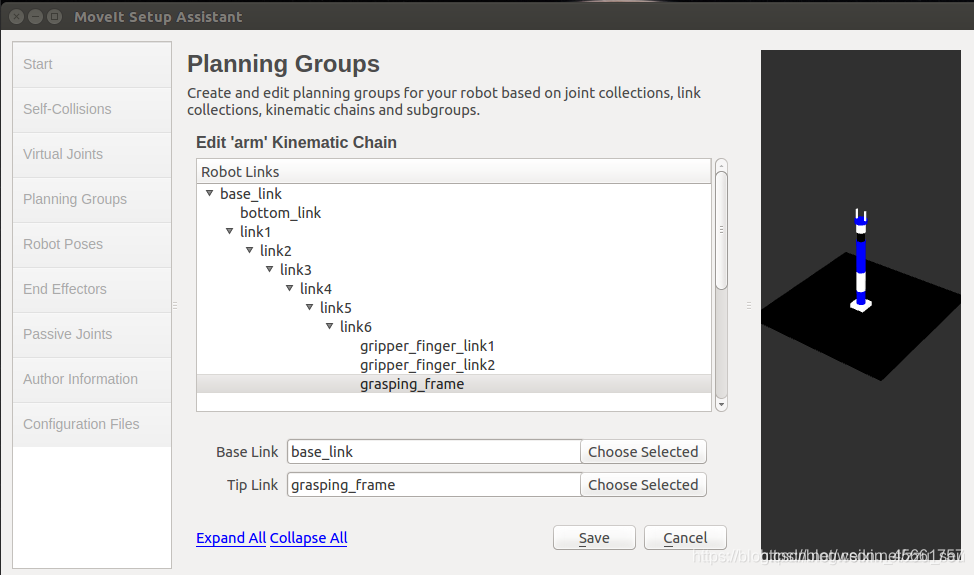
Base Link是最低端的关节;
Tip Link是最顶端的关节;
在上方选中基础关节然后点击在Base Link处点击Choose Selected,上方选中顶端关节然后点击在Tip Link处点击Choose Selected;
点击save,机械臂运动规划组已经配置完成。
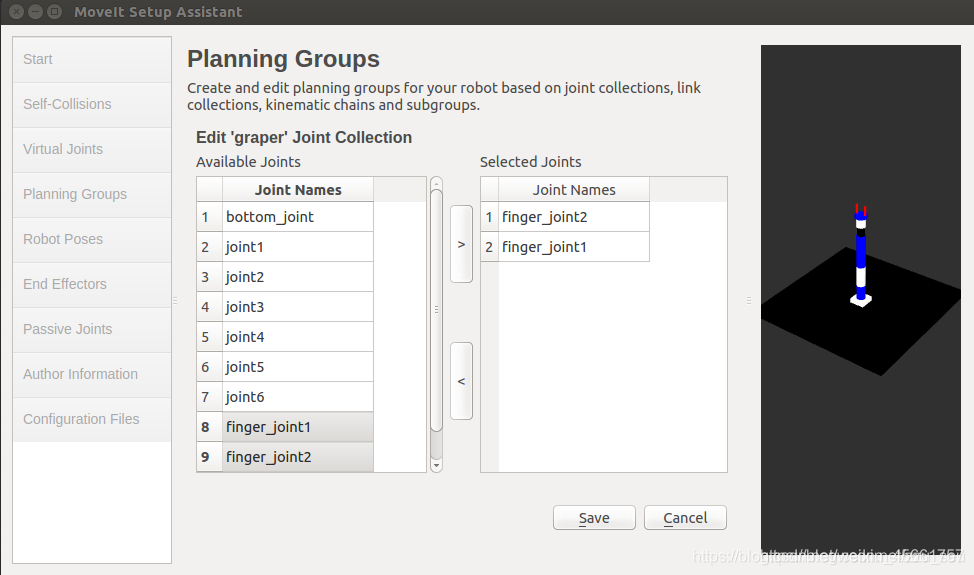
点击右下角的Add Group按钮,配置末端夹取机构规划组。
在这里,夹取机构很简单,只有两根手指,一个固定不动,另一个只能让水平运动,不涉及运动学规划,只需要Add Joints,将手指的关节添加进去。
再添加两个相关的Links
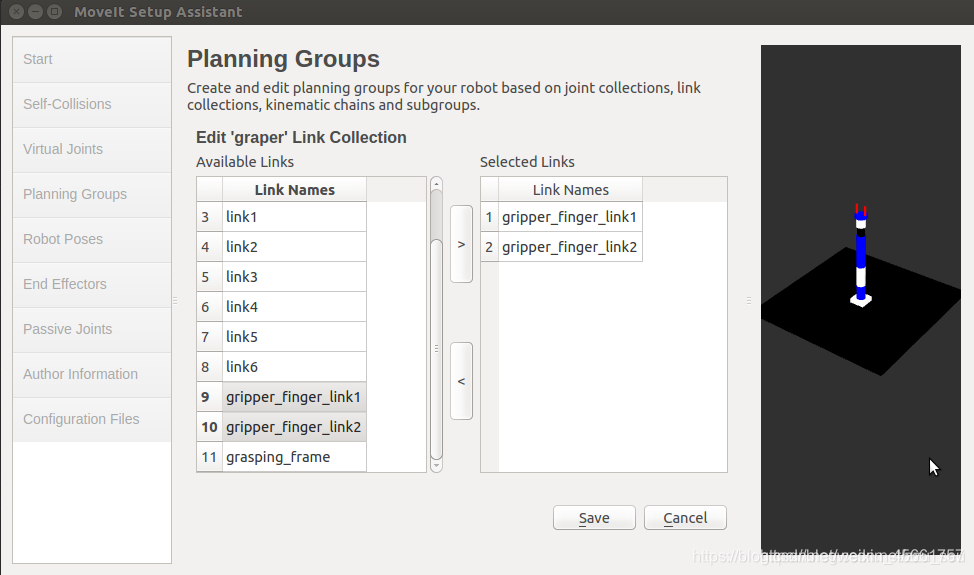
点击save。
五、定义机器人位姿
点击Robot Poses(机器人姿态),配置机器人的基础的姿态。可以通过Add Pose添加一些机器人的位姿并命名,可以在变成或者GUI中通过命名的字符串直接调用姿态信息。
这样做的好处就是当使用MoveIt!的API编程时,可以直接通过名称调用这些位姿。
六、配置终端夹爪
点击End Effectors,配置终端的夹具。
点击Add End Effectors,添加终端的夹具。
- 第一行为夹具的名称
- 第二行选择刚创建的规划组
- 第三行是与末端夹具连接的Link
- 最后一个可不选
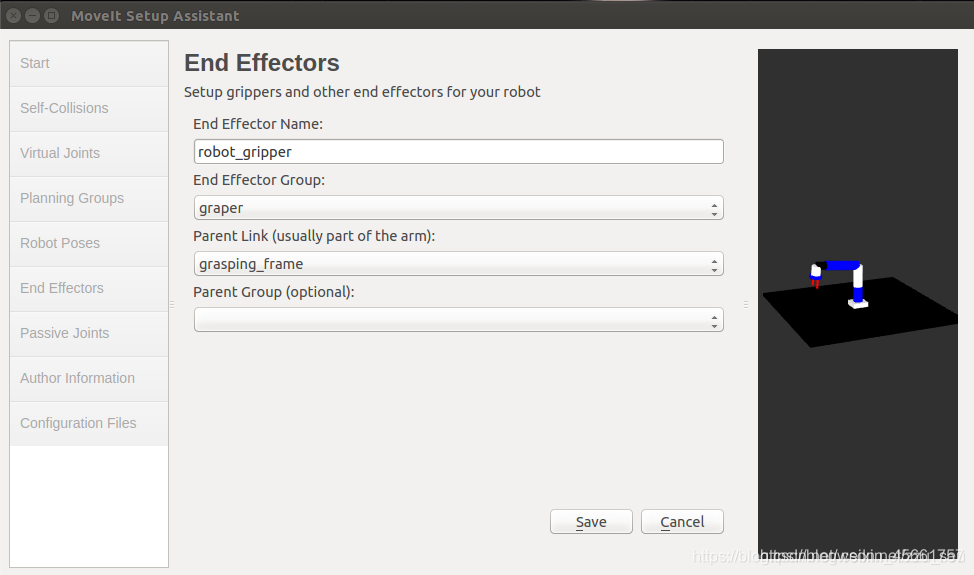
点击save。
七、配置无用关节
点击Passive Joints,配置运动规划时不需要考虑的关节,例如某些关节是不需要运动的,运动规划的时候不需要进行考虑该关节的运动。
注:根据自己的需要进行选择关节,没有的话可以跳过这一步。
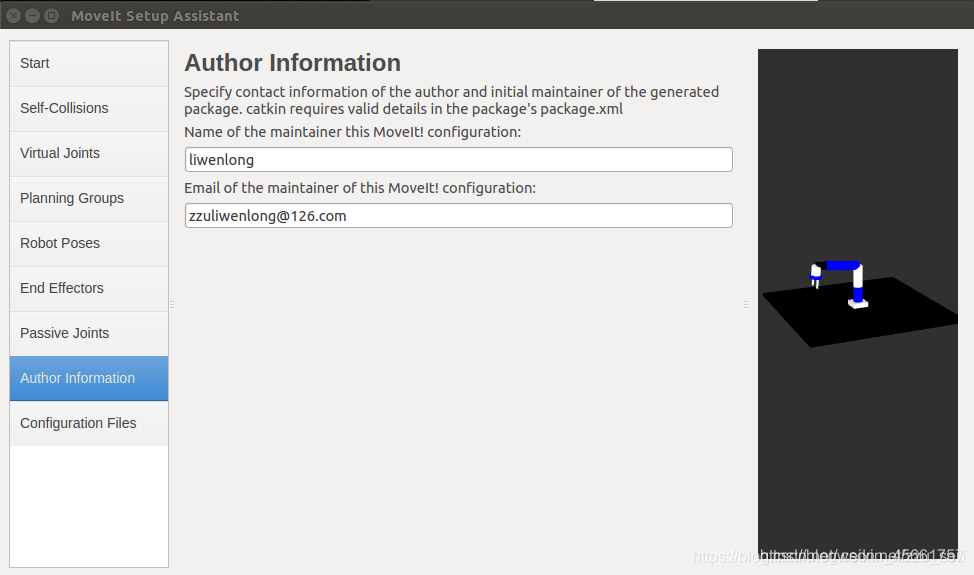
八、设置作者信息
点击Author Information,可以填写作者信息。
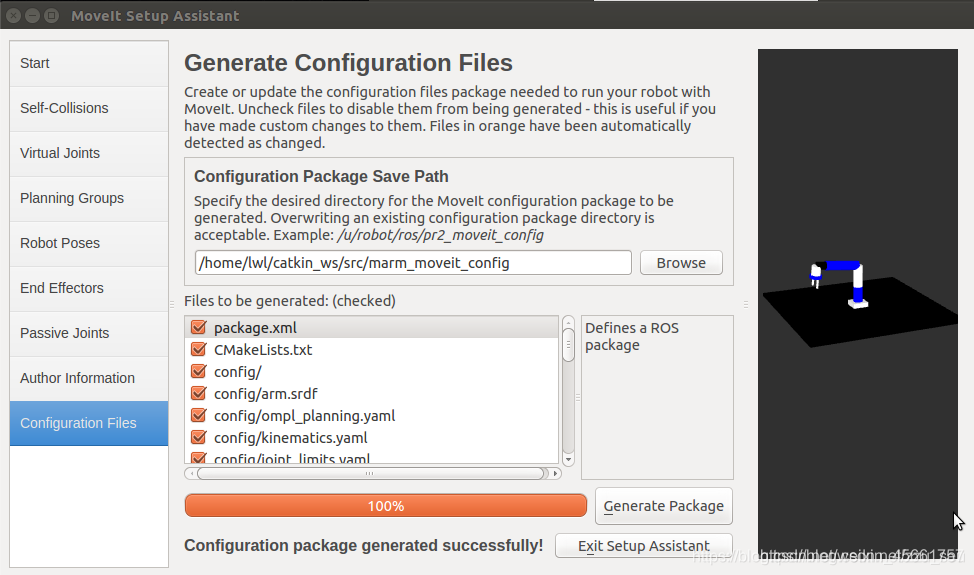
九、生成配置文件
点击Browse按钮,选择一个存储配置功能包的路径。Setup Assistant会将所有配置文件打包生成一个ROS功能包,一般命名为RobotName_moveit_config。
点击Configuration Files生成最终的配置文件,可以看到Configuration package generated successfully!的消息提示。
十、配置完成
点击Exit Setup Assistant按钮即可退出界面,在指定的文件夹下面已经有了生成的配置文件。