日期:2019年2月
期刊:applied sciences
单位:Department of Geoinformatic Engineering, Inha University
目录
2.2.2. Ground-Truth Data and Land-Cover Map
2.3. Classifification Methods and Feature Extraction
2.4. Classifification Procedures
3.1. Parameterization of RF and SVM Classififiers
3.2. Visual Assessment of Classifification Results
3.3. Quantitative Accuracy Assessment
3.4. Comparison of Spectral and Texture Information
Abstract
与卫星图像相比,无人机图像能够以更高的空间和时间分辨率提供专题信息,在作物分类方面具有巨大潜力。由于无人机图像的超高空间分辨率,纹理等空间上下文信息经常用于作物分类。从数据可用性的角度来看,由于研究区域的可访问性有限,不可能总是获取时间序列无人机图像。因此,当单一或最少数量的无人机图像可用于作物分类时,有必要提高分类性能。在本研究中,我们研究了基于灰度共生矩阵(GLCM)的纹理信息用于作物分类的潜力,包括时间序列无人机图像和机器学习分类器,包括随机森林和支持向量机。特别是,对于仅使用一幅无人机图像或多时相图像作为输入的情况,评估了纹理和光谱信息组合对分类性能的影响。为进行上述比较,对韩国安班代基的作物分类进行了案例研究。将能够充分反映作物生长周期的多时相无人机图像与基于GLCM的纹理特征相结合,可以获得最佳的分类精度。然而,纹理信息利用的影响并不显著。相比之下,当一幅八月无人机图像用于作物分类时,纹理信息的利用会显著影响分类性能。使用从具有较大核尺寸的GLCM中提取的纹理特征进行分类显著提高了分类精度,与仅基于光谱信息的分类相比,支持向量机分类器的总体精度提高了7.72%。这些结果表明纹理信息对于超高空间分辨率无人机图像的分类非常有用,特别是当时间序列无人机图像难以获取且仅使用一幅无人机图像进行作物分类时。
关键词:无人飞行器;纹理灰度共生矩阵;机器学习;庄稼
1. Introduction
众所周知,农业环境对异常天气条件和气候灾害(如干旱和洪水)非常敏感[1,2],因此对作物条件和作物产量预测进行必要的系统监测[3,4]。遥感技术由于能够为作物监测和专题制图提供定期和区域信息而受到农业界的关注[5,6]。
根据遥感图像分类得到的作物类型图是作物产量估计和预测的重要资源。由于作物类型图中的任何错误都会影响作物产量和预测模型的输出,因此生成可靠的作物类型图至关重要[6]。用于作物分类的输入遥感图像的最重要元素是其空间和时间分辨率。由于每种作物都有自己的生长周期,因此有必要使用时间序列图像来充分解释伴随作物生长的物理特性变化[7,8]。根据目标区域的尺度、具有适当空间分辨率的卫星图像应作为作物分类的输入。如果使用粗分辨率卫星图像,则可能出现混合像素问题,分类性能降低[9,10]。这在韩国是一个常见的问题,那里的各种作物都是在小面积种植的。使用高分辨率卫星图像和航空照片有助于解决混合像素问题[11,12]。尽管高分辨率图像的分辨能力增强,但很难收集作物整个生长周期的时间序列数据集。光学卫星图像的获取在很大程度上取决于大气条件;因此,图像经常被云层污染和遮蔽。此外,由于成本问题,很难在需要的时间获取时间序列航空照片。
近年来,人们对无人机(UAV)成像越来越感兴趣[11-15]。与卫星图像相比,无人机图像的优势在于其能够以更高的空间和时间分辨率提供本地专题信息[15]。超高空间分辨率的无人机图像[16,17]可以提高各种表面物体的识别能力,从而增加可检测目标的数量。与卫星图像相比,无人机系统(UAS)的低成本灵活控制更容易在作物播种和收获之间的期望时间获取图像[12,15,16]。
尽管无人机成像具有巨大潜力,但该技术仍存在一些实际问题。首先,当采用传统的基于像素的方法进行分类时,无人机图像的超高空间分辨率通常会由于可检测目标的增加而导致噪声影响[11,18,19]。减轻噪声影响的常见方法是使用空间上下文信息或应用面向对象的分类方法。对于空间上下文信息方法,首先从灰度共生矩阵(GLCM)中提取纹理信息[20],然后结合光谱信息进行分类[21–23]。利用这些纹理信息可以减少基于像素的方法中孤立像素的影响。面向对象方法首先通过多分辨率分割提取有意义的对象[24],然后对对象单元进行分类[25–27]。众所周知,这两种方法比单纯基于光谱信息的基于像素的方法具有更好的分类精度[19,22]。第二个问题是与数据预处理和处理相关的繁重计算负载[11]。大多数无人机图像都是使用窄视场获取的,这需要对多个子图像进行拼接才能获得完整的图像集。如果子图像是在不同的太阳条件和飞行高度下拍摄的,则应在镶嵌期间使用辐射定标。无人机图像的超高空间分辨率使得预处理复杂,分类需要大量处理时间[11]。
另一个重要问题是,构建用于作物分类的时间序列无人机图像集并不总是可能的。虽然与卫星图像相比,无人机图像的获取受大气条件的影响较小,但在某些季节,尤其是与韩国作物生长季节相一致的雨季,可能很难拍摄无人机图像[12]。从作战角度来看,获取用于作物分类的时间序列无人机图像的前提条件是操作员多次访问相关区域。从实用的角度来看,有必要在特定的时间获取最佳图像,以达到与使用完整的时间序列图像集相当的分类精度。使用无人机图像进行作物分类主要使用单个无人机图像[21,28],但与使用时间序列图像集的情况进行精度比较尚待充分考虑。
除了数据采集问题外,选择适当的分类方法对于生成可靠的作物分类结果也很重要。自2000年代以来,随机森林(RF)和支持向量机(SVM)等机器学习算法被广泛应用于遥感数据作物分类[29-34]。
除了上述与使用无人机图像进行作物分类和选择合适的分类方法相关的问题外,本文重点评估纹理信息对使用无人机影像进行作物分类的有效性。特别是,将使用单日期无人机图像的分类性能与时间序列图像集的分类性能进行了比较。在本研究中,将两种机器学习算法RF和SVM用作分类模型,并将基于GLCM的纹理特征[20]用作附加特征,以减少噪声影响。从实际角度出发,我们还研究了当只有一幅无人机图像时,纹理信息的利用能在多大程度上提高分类精度。利用UAV图像在韩国高原泡菜种植区Anbandegi进行作物分类的案例研究,以说明和讨论两个问题,包括UAV图像的有限使用以及基于GLCM的纹理特征对分类性能的影响。
2. Materials and Methods
2.1. Study Area
韩国刚原省的安班代基是一个主要的高原泡菜种植区,被选为案例研究区(图1)。夏季泡菜通常在韩国的高地种植,因为高温和高湿度会导致生理失调、害虫和疾病[35]。研究区域的海拔约高于平均海平面1000米,相对高于周围地形,适合高原泡菜种植[35]。在研究区域,卷心菜和土豆也与高原泡菜一起种植。研究区域内所有作物地块的总面积为42.5公顷,每个作物地块的平均面积约为0.6公顷。非作物区的土地覆盖类型主要是森林。

2.2. Datasets
2.2.1. UAV Images
考虑到高原泡菜的生长周期,我们使用了2017年6月至9月拍摄的六幅无人机图像拼接图(表1)。美国国家农业科学研究所(NAAS)提供的预处理无人机图像拼接图是从配备Cannon S110相机的固定翼无人机系统(UAS;eBee,Sensefly,Swiss)获取的,该相机包括绿色(550 nm)、红色(625 nm)和近红外(NIR;850 nm)光谱带(以下简称VNIR)。地面采样距离为12 cm的无人机图像拼接被提升至25 cm分辨率,以便于数据处理不丢失信息。放大可能会导致纹理图像信息丢失。然而,我们在研究区域分区的初步实验中,并未观察到纹理特征生成和分类结果的显著变化,这是由于研究区域内作物地块的大小所致。因此,将分辨率为25 cm的图像拼接用作分类输入。为了检验具有纹理信息的单日期图像的适用性,选择了8月25日采集的无人机图像拼接,因为高原泡菜的生命力最旺盛。第3节详细解释了该选择。
2.2.2. Ground-Truth Data and Land-Cover Map
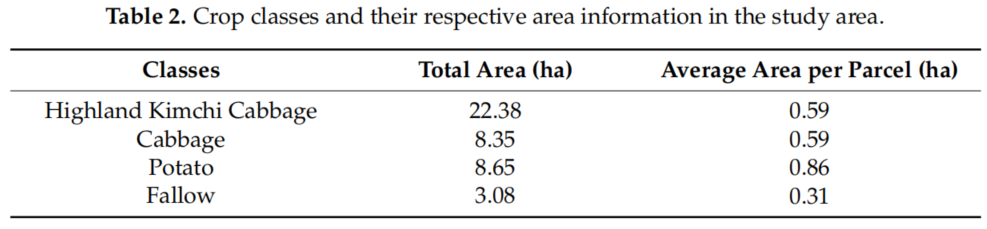
实地调查获得了地面真实作物类型,NAAS也提供了这些作物类型。这些数据用于提取训练数据和评估分类性能。表2列出了监督分类的作物类别和每种作物类型的面积信息。为了模拟具有有限可用训练数据的情况,随机选择了20000个像素(约为地面真实数据的0.3%),并将其用于监督学习的训练数据。剩余的6710210像素(地面真实数据的99.7%)用作参考数据。请注意,相对较小的训练数据集和较大的参考数据集分别用于分类和评估。由于分类的主要目标是研究区域内的作物,因此在使用环境部提供的土地覆盖图进行分类之前,将包括森林在内的非作物区域遮住[36]。
2.3. Classifification Methods and Feature Extraction
2.3.1. Random Forest
Breiman[37]开发的RF分类器通过将决策树扩展到多棵树而不是单个树来执行分类。它的分类性能优于单个决策树,因为它能够通过树集合最大化多样性。由于综合了大量树的分类结果,并通过多数投票确定最终类别标签,因此它也显示出更大的稳定性。此外,与其他机器学习算法不同,RF需要设置一些参数(即节点分区变量的数量和要生长的树的数量)。
RF分类器将引导聚合(打包)应用于树学习器。打包重复选择一个随机样本来替换训练数据,并将树与这些样本相匹配。剩余的训练数据,即包外(OOB)数据,用于验证树[37]。OOB错误是OOB分类器的错误率,通常用于衡量训练数据的泛化错误[37]。为了避免训练数据过拟合,树的每个节点确定分区条件,每个树选择随机预测变量,并使用genie索引划分节点,作为异质性的度量。RF分类器的另一个功能是使用平均减少杂质(MDI)和平均减少准确度(MDA)计算变量重要性的定量度量[28]。在构建大量树时,可以通过随机改变变量,分别平均每棵树的加权杂质和精度提高程度,计算MDI和MDA。在这项研究中,变量重要性被用来量化纹理信息对作物分类的有用程度。
2.3.2. Support Vector Machine
SVM是一种机器学习算法,用于在类边界处找到训练数据的最优决策边界[38]。众所周知,SVM分类器对于使用有限数量的训练数据进行分类是有效的[39]。SVM的主要概念是解决使决策边界之间的裕度最大化的优化问题[40]。为了解决非线性优化问题,通常使用径向基函数(RBF)等核函数[39]。当使用RBF核时,应最佳确定成本和伽马参数。较大的成本和gamma值会导致训练数据过拟合,导致分类器的泛化能力较差[41]。在本研究中,这两个超参数是通过基于训练数据10倍交叉验证的网格搜索确定的[42]。
2.3.3. Texture Information
为了减少分类结果中孤立像素的噪声影响,将纹理信息作为分类的辅助特征。图像纹理分析方法可分为四类:统计、几何、基于模型和信号处理[43]。由Haralick等人[20]开发的GLCM是一种广泛应用于遥感数据处理的统计方法,例如植被结构建模[44]和土地覆盖分类[45]。原始图像首先转换为灰度。然后,利用中心像素与其邻域在预定义核内的亮度值之间的关系,提取灰度图像的空间特征。亮度值的关系由矩阵表示,该矩阵由沿定义方向同时存在的连续像素值对的出现频率组成。通过使用这种关系,GLCM可以根据灰度级别、核大小和方向生成不同的纹理信息。Haralick等人[20]定义的十四个纹理特征是相关的,这表明使用所有可能的纹理特征都会提供冗余的空间上下文信息,而这些信息对于分类来说并不有用。在本研究中,考虑了六种纹理特征[46]:(1)平均值(ME),(2)标准差(STD),(3)同质性(HOM),(4)相异性(DIS),(5)熵(ENT),和(6)角秒矩(ASM),如等式(1)至(6)所示:
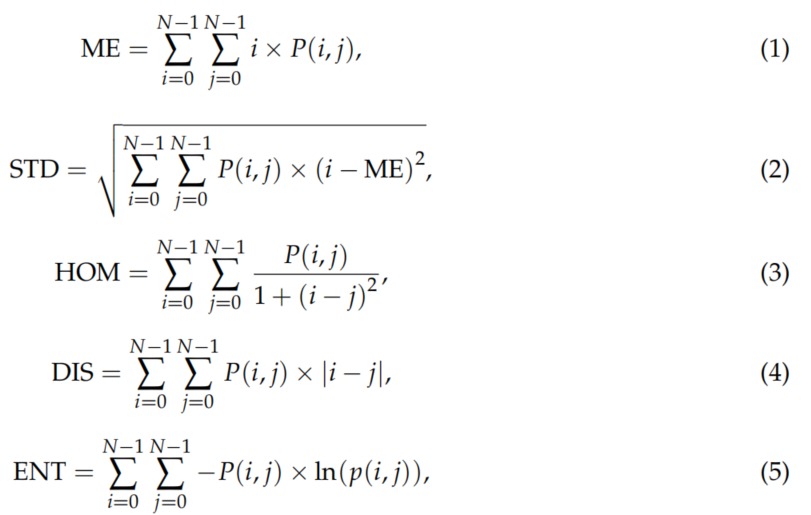

其中N表示灰度级别,P(i,j)是内核中位置 i 和 j 处的标准化灰度值,其和为1。以上纹理特征是从全方位64阴影灰度图像生成的。
为了测试内核大小的影响,我们使用了三种不同的内核大小:3×3(GK3)、15×15(GK15)和31×31(GK31)。
2.4. Classifification Procedures
利用无人机图像进行作物分类的整个过程如图2所示。对于每个分类器,首先在训练阶段寻求最佳参数。为了研究输入图像数量和纹理特征的影响,我们测试了每个分类器的八个组合案例:UAV图像(两个案例:使用八月图像和六个多时相图像)和纹理特征(四个案例:具有三种不同内核大小(GK3、GK15和GK31)的纹理特征,而没有纹理特征)。出于比较目的,考虑了这些组合,因为本研究的主要目标是评估使用单日期无人机图像进行作物分类时使用纹理信息的有效性。使用基于混淆矩阵(如总体准确度(OA)、生产者准确度(PA)和用户准确度(UA))的量化方法评估分类准确度。

2.5. Implementation
ENVI软件版本4.8用于生成基于GLCM的特征和分类结果的可视化。所有分类和评估程序均在R软件环境中完成[47]。SVM和RF模型分别使用R包e1071[42]和randomForest[48]构建。
3. Results and Discussion
3.1. Parameterization of RF and SVM Classififiers
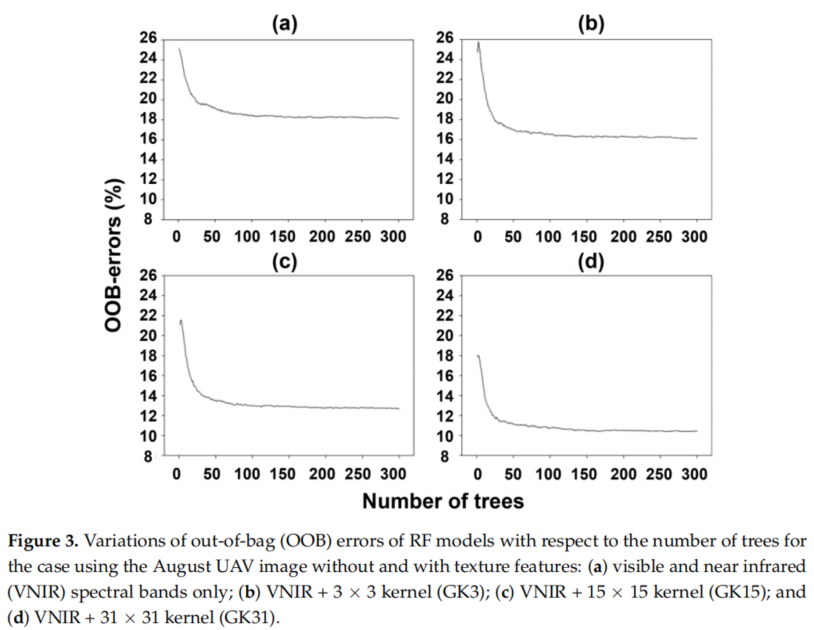
对于RF分类器,必须选择两个参数,即节点分区所需的变量数和要生长的树数。首先,节点分区的变量数设置为变量总数的![]() 。例如,对于使用具有纹理信息的八月图像的情况,有九个变量(三个光谱带和六个纹理特征);因此,节点分区的变量数量设置为3。为了确定要生长的树的数量,研究了OOB错误与树数量的关系。根据OOB误差的变化,可以判断RF建模是否使用了足够数量的树。通常,OOB错误会随着树的数量增加而减少,然后在特定的树数量下收敛到某个值。当使用六幅多时相无人机图像作为输入时,未观察到OOB误差的显著差异,并且不同纹理特征的误差值也很低。图3显示了使用没有纹理特征和带有纹理特征的八月图像时OOB错误的变化。四种组合情况显示出不同的收敛值,但变化模式非常相似。随着树的数量增加到大约50棵,所有四种组合情况的OOB错误都急剧减少。然后,当树的数目约为150棵时,OOB错误达到收敛值。通过考虑OOB错误的收敛性和处理时间,将要生长的树的数目设置为150棵。
。例如,对于使用具有纹理信息的八月图像的情况,有九个变量(三个光谱带和六个纹理特征);因此,节点分区的变量数量设置为3。为了确定要生长的树的数量,研究了OOB错误与树数量的关系。根据OOB误差的变化,可以判断RF建模是否使用了足够数量的树。通常,OOB错误会随着树的数量增加而减少,然后在特定的树数量下收敛到某个值。当使用六幅多时相无人机图像作为输入时,未观察到OOB误差的显著差异,并且不同纹理特征的误差值也很低。图3显示了使用没有纹理特征和带有纹理特征的八月图像时OOB错误的变化。四种组合情况显示出不同的收敛值,但变化模式非常相似。随着树的数量增加到大约50棵,所有四种组合情况的OOB错误都急剧减少。然后,当树的数目约为150棵时,OOB错误达到收敛值。通过考虑OOB错误的收敛性和处理时间,将要生长的树的数目设置为150棵。
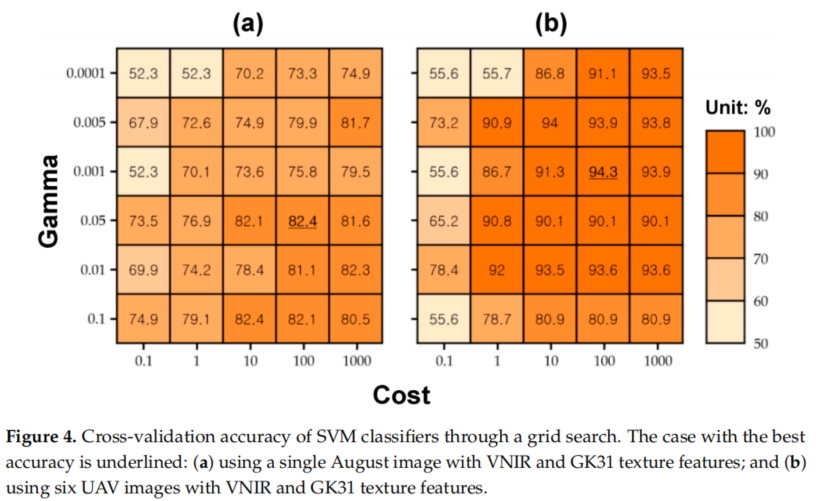
使用网格搜索调整了SVM分类器RBF核的两个参数(代价和gamma)。通过训练数据的10倍交叉验证,确定了这两个参数的最佳组合。对于GLCM和输入UAV图像的不同内核大小的组合情况,最佳成本和伽马值相似。图4显示了使用八月图像和六幅纹理特征为GK31的多时相无人机图像的案例网格搜索结果,显示了不同的训练精度值。对于使用具有纹理特征的八月图像的案例,网格搜索获得的训练准确率在52%到82.4%之间,而使用六幅无人机图像的案例的最大训练精度提高到94%。应该注意的是,这种准确性是在培训阶段获得的;因此,较高的训练精度可能无法实现较高的预测性能。研究发现,与RF分类器相比,SVM分类器在模型参数变化方面的性能差异也很大,这表明了SVM分类器优化参数搜索的重要性。
3.2. Visual Assessment of Classifification Results
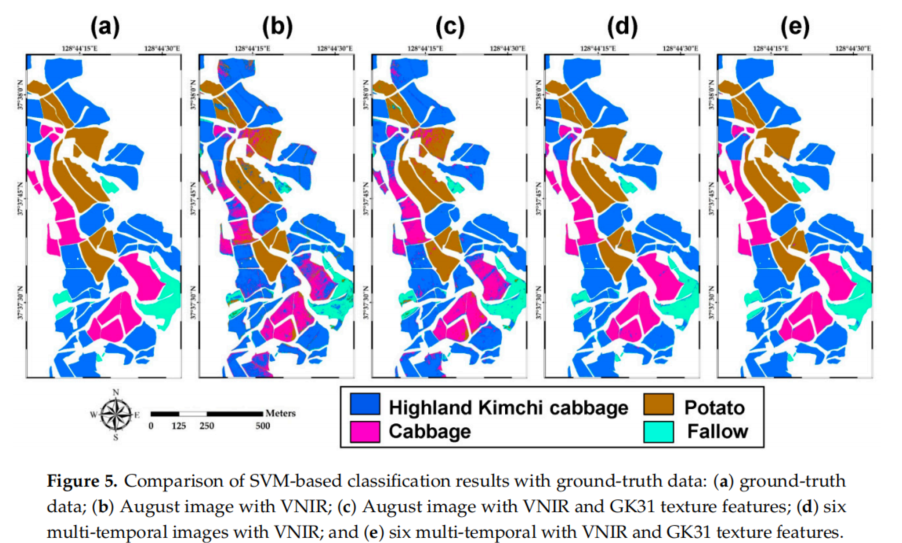
确定最佳参数后,将RF和SVM分类器应用于不同的案例组合。在定量准确度评估之前,首先对分类结果进行目视评估。当比较输入图像和核大小的不同组合的RF和SVM分类结果时,RF分类器在研究区域东南部的一些地块上显示出错误分类,但没有观察到分类模式的显著差异。图5显示了使用SVM分类器的一些分类结果。当使用八月图像的三个光谱带进行分类时,在分类结果的目视检查中,孤立像素的误分类和噪声影响最大。高原泡菜和卷心菜之间的混淆最为常见,如图5b所示,主要是因为它们在8月份的光谱特征相似(这在第3.5节中进一步讨论)。当纹理特征与仅使用八月图像的光谱信息相结合时,误分类和孤立像素的数量减少,但仍显示出一些误分类像素(图5c)。使用多时相图像大大减少了每个地块内的误分类像素,地块边界周围的一些像素除外(图5d)。不出所料,纹理特征作为附加信息与多时相光谱信息的使用表明,与目视检查的地面真实数据最为一致(图5e),这表明时间序列图像和纹理特征对作物分类的必要性。
此外,还直观地比较了不同核大小生成的纹理特征对分类结果的影响。种子大小对分类模式有显著影响。当使用非常小的核尺寸(如GK3)提取纹理特征时,分类结果与仅包含光谱信息的情况非常相似。随着核尺寸的增大,噪声影响大大减轻。然而,当使用多时相图像进行分类时,纹理特征与多时相光谱信息的结合受核变化的影响较小,受内核大小变化的影响。内核大小的增加导致孤立噪声模式的减少,但与c相比,差异很小。
3.3. Quantitative Accuracy Assessment
通过计算和比较精度统计,对上述视觉和定性比较结果进行了进一步定量评估。首先为每个分类器的所有组合情况准备混淆矩阵,并通过比较分类结果与未用于训练的参考数据来计算相关的准确度统计数据。
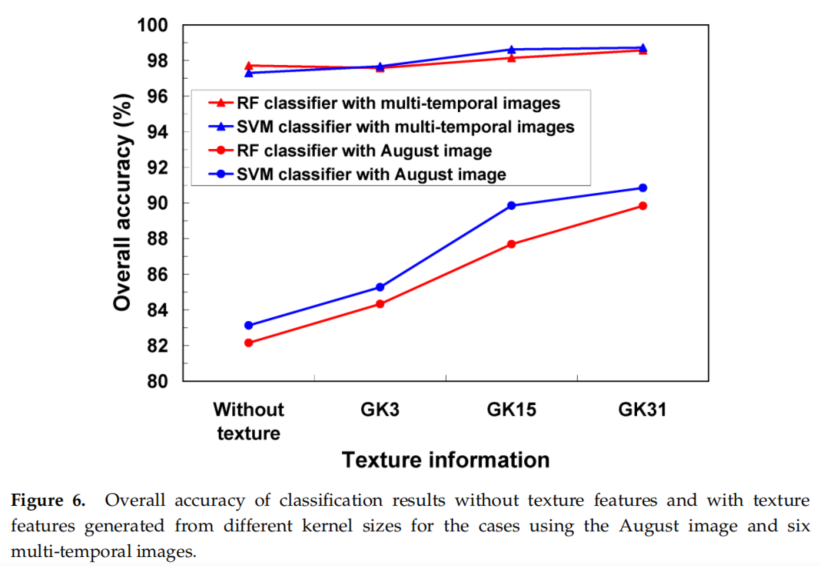
图6显示了没有纹理特征(VNIR)的分类结果的OA变化,以及使用八月图像和多时相图像从不同的核大小(GK3、GK15和GK31)生成的纹理特征。尽管很少一部分地面实况数据被用作训练数据,但当使用多时相图像进行分类时,两个分类器的OA值明显较高(即超过97%)。无论输入图像的数量和分类器类型如何,纹理特征和光谱信息的组合都会导致OA的增加。OA也随粒径增大而增大;然而,随着核尺寸的增加,对于多时相图像的分类,OA只得到了轻微的改进。这一结果可以用以下事实来解释:时间序列光谱信息已经为作物的鉴别提供了最有用的信息;因此,纹理特征的贡献是最小的。相比之下,在仅使用八月图像的分类结果中,通过考虑纹理特征的OA改进要比使用多时相图像的分类效果显著得多。此外,GLCM的内核大小对使用八月图像的OA有很大影响。随着核大小的增加,SVM和RF分类器的OA都会增加,使用GK31纹理特征显示出最佳的分类精度。
在比较两种分类器的分类性能时,对于八月图像的分类,SVM分类器表现出比RF分类器更好的OA,表明SVM分类器在本研究区域的作物分类方面的优势。无论核大小如何,SVM和RF分类器之间的OA差异在McNemar检验的5%显著性水平上是显著的[49]。值得注意的是,即使对于基于多时相图像的所有分类结果,两个分类器之间的OA差异在5%的显著性水平上也是显著的。尽管两个分类器在多时相图像分类中的OA值相似,但这种统计显著差异主要是由于使用了大量参考数据(6710210像素)进行评估。尽管SVM分类器中的参数调整比RF分类器更为苛刻,但在训练阶段用相对较小的训练数据集确定的SVM分类器的最佳两个参数可以避免训练数据过拟合,从而使本研究中的大量参考数据具有泛化能力。
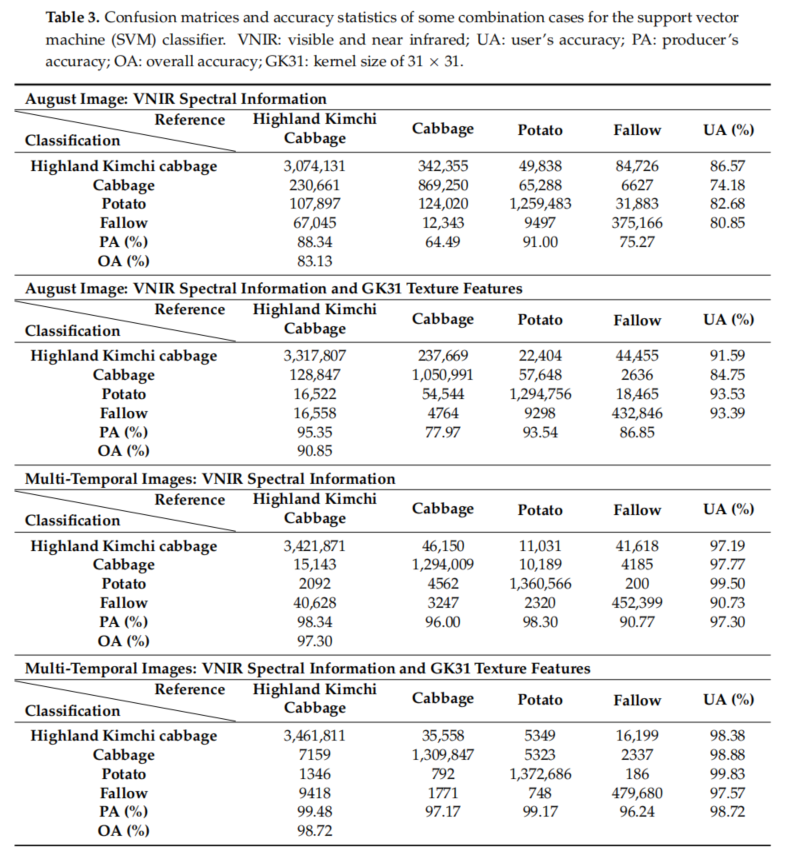
表3列出了SVM分类器典型组合情况的一些混淆矩阵(一幅图像与多时相图像,有或没有纹理特征)。仅考虑八月图像,将纹理特征(GK31)与光谱信息相结合导致OA增加7.72%p,与仅使用光谱信息的分类结果相比(从83.13%到90.85%)。还实现了类精度的提高,以及OA的改进。正如分类结果的视觉分析所讨论的那样,表3中四个类别之间的混淆(尤其是高原泡菜和卷心菜之间的混淆)显著减少,所有类别的PA和UA均增加。当只考虑使用VNIR的八月图像进行分类时,休耕类中高地泡菜、卷心菜和杂草的类似植被活力导致了严重的混乱。通过使用光谱信息解释纹理特征,可以减少混淆。然而,卷心菜的PA和UA相对低于其他作物,表明卷心菜与高原泡菜的错误分类持续存在。当使用多时相图像进行分类时,所有类别的准确度值都有所提高,尤其是卷心菜。事实证明,具有多时相光谱信息的纹理特征在卷心菜类别中最有用,因为它可以减轻卷心菜与高原泡菜之间的错误分类。
根据图6和表3中的所有评估结果,可以得出结论,通过适当的核大小提取的纹理信息可以提高分类性能,当使用单个图像进行作物分类时,使用纹理特征的影响最为显著。后一项发现表明,由于难以获取感兴趣区域的时间序列无人机图像,当只有一幅无人机图像可用于作物分类时,纹理信息非常有用。
3.4. Comparison of Spectral and Texture Information
为了检查哪个变量对分类性能影响最大,使用RF分类器中的MDA计算变量重要性的定量度量。图7显示了与GLCM不同内核大小相关的输入变量的MDA值。由于54个输入变量用于六幅多时相图像的分类,因此仅列出了MDA值最高的前九个变量用于说明。不考虑输入图像和GLCM的核大小,近红外和绿带是RF分类器的最有影响的变量。特别是,7月至9月的近红外波段被列为多时相图像分类的重要变量。请注意,光谱信息比纹理信息更有用,只有一种纹理特征(如ME)对多时相图像有用。ME是对有助于GLCM的空间关系中所有像素强度的估计,是六种纹理特征中最重要的变量,与输入图像无关。
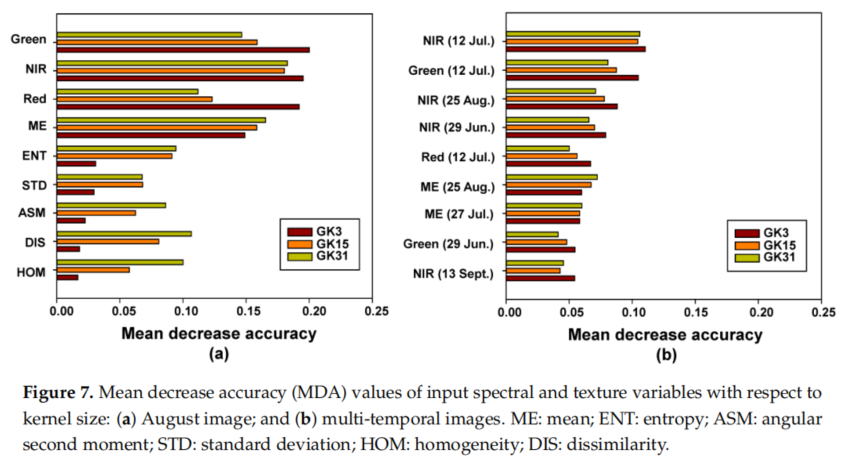
根据输入图像,输入变量的MDA值有很大差异。当使用六幅多时相图像进行分类时,由于许多输入变量的贡献,每个变量的MDA值相对较小,但由许多输入变量提供的信息量导致了非常高的分类精度,如表3所示。尽管多时相光谱带被认为是信息最丰富的,ME的影响随着内核大小而增加(参见图7中GK31的ME MDA值)。由于仅使用八月图像进行分类,ME是GK15和GK31的第二个最重要变量,表明ME特征对于研究区域的作物分类非常有用。其他纹理特征的贡献随着内核大小的增加而增加。对于GK3,纹理特征的MDA值远小于光谱带。随着内核大小的增加,MDA值的增加对于纹理特征(包括DIS和ENT)最为显著。从具有适当核大小的GLCM中提取的纹理信息可以填补多光谱信息的空白,从而提高分类精度。
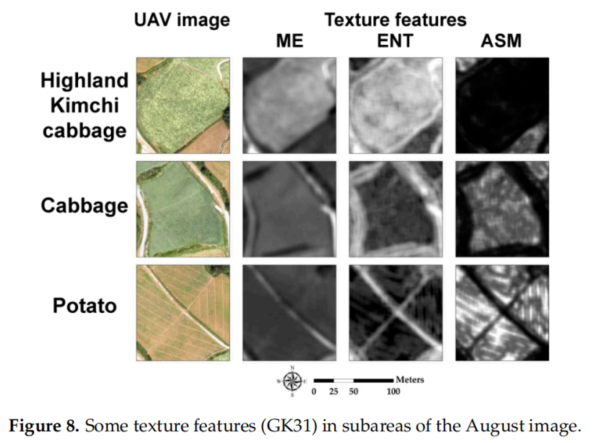
为了进一步定性检查纹理特征,图8提供了GK31四个分区中的一些纹理特征。较亮的颜色表示每个纹理特征中的较大值。ME,这被视为GLCM平均值,提供低通滤波空间信息,有助于减轻超高分辨率无人机图像中的噪声影响。作为衡量对比度分布随机性的指标,ENT随着中心像素与其相邻像素之间亮度值的较大变化而增加。不同类别的ENT值如图8所示。ASM测量对比度的均匀性,也随四个类别而变化。对纹理特征的目视检查进一步证实了纹理信息的有用性。
考虑到用于作物分类的无人机图像的空间分辨率(即25 cm),GK3和GK31纹理信息在地面上分别代表0.75 m和7.75 m。GK31纹理特征很可能很好地代表了作物种植的序列线模式,因此导致了卓越的OA。然而,这是研究领域的特殊结果。如果输入图像的空间分辨率和作物类型发生变化,则应通过考虑空间分辨率以及种植模式和作物特征(如大小和形状)来确定GLCM的最佳内核大小。
3.5. Time-Series Analysis of Normalized Difference Vegetation Index for Selection of Optimal UAV Image
作物的光谱特性取决于作物类型和健康状况,但不同的作物可能表现出类似的光谱响应[35,50]。因此,在作物生长周期期间获取的时间序列图像通常用于检查这些图像对光谱响应的时间变化的解释程度。例如,如果研究区域内作物光谱响应的时间模式存在显著差异,则基于多时相图像的分类可以达到令人满意的分类精度。相反,即使在多温度条件下,也很难区分光谱响应具有类似时间变化的作物。

图9显示了每种作物像素处归一化植被指数(NDVI)平均值的时间变化。NDVI是一种标准化指数,通过使用近红外和红色波段之间的反射率差异来量化绿色度[51]。7月12日,高原泡菜的平均NDVI值显著低于其他作物,并在8月下旬达到峰值。7月下旬,卷心菜的NDVI值最高,其次是土豆。在八月的图像中,高原泡菜和卷心菜的平均NDVI值相差不大(图9),这导致难以区分这两种作物。尽管如图9所示,7月27日的差异较大,但高地Kimchi的最低NDVI值可能导致分类结果中与休耕地和其他小型植被混淆。如果只需采集一幅无人机图像,则需要在感兴趣作物的植被活力达到最大值时采集图像。由于高原泡菜在8月25日的图像中达到了最大NDVI值,我们选择该图像作为最佳单幅图像。实际上,使用7月12日或27日图像的分类精度与使用8月图像的分类精确度相似或更低。尽管仅使用八月图像有误分类的风险,但不同作物的类似光谱响应强调了使用额外信息(如纹理特征)的必要性,如本研究中所应用的。由于每年达到NDVI最大峰值的时间可能因天气条件而异,因此应通过考虑作物的条件和类型来选择最合适的采集日期。因此,应在不同作物类型的其他地区进行更广泛的试验。此外,如果可以从整个时间序列图像集[52,53]估计物候特征,则可以更优化地确定单个图像采集日期。
3.6. Classifification Methods
本研究将RF和SVM两种机器学习算法应用于作物分类。最近,包括卷积神经网络(CNN)在内的深度学习算法被广泛应用于遥感数据分类[54–56]。尽管CNN表现良好,Kim等人[57]报告称,在作物分类中,训练样本大小对CNN精度的影响大于SVM,这表明需要大量训练样本来提高CNN分类性能。此外,Yu等人[58]还报告说,对于中等分辨率的土地覆盖分类,具有相邻区域特征的SVM比CNN显示出更好的准确性。因此,深度学习并不总是适用于所有情况,如果将适当的空间上下文特征与光谱信息相结合,传统的机器学习算法可以实现与深度学习算法相当甚至更好的分类性能。为了进一步评估纹理特征对作物分类的有用性,将与基于面片的CNN分类器进行比较。
4. Conclusions
本研究利用时间序列无人机图像和机器学习算法,研究了基于GLCM的纹理信息用于作物分类的潜力。主要重点是评估使用单一无人机图像时,纹理特征和光谱信息的利用效益。高原泡菜种植区作物分类的案例研究表明,利用基于GLCM的纹理特征对多时相无人机图像进行最精确的分类。
然而,利用多时相图像光谱信息的纹理特征并没有显著提高分类精度。相比之下,当仅使用单个UAV图像时,纹理特征的使用可以显著提高分类精度。因此,当由于难以构建时间序列无人机数据集而仅使用一幅无人机图像进行作物分类时,光谱信息的不足可以由纹理特征的结构信息来补充。此外,纹理信息对分类精度的影响取决于GLCM的核大小。从具有较大内核大小的GLCM中提取的纹理信息提高了研究区域的分类性能。因此,选择合适的核大小对于提取基于GLCM的纹理特征至关重要。这表明,在选择最佳核尺寸时,应考虑输入无人机图像的空间分辨率和感兴趣作物的形状特征。然而,这些发现可能是针对具有特定作物类型的本研究区域的,不适用于其他区域。因此,应在具有不同作物组合的其他地区进行更多实验,以增强无人机图像纹理信息对作物分类的潜在益处。未来还将进行有关使用纹理特征确定作物分类中无人机图像最小数量的实验,并与深度学习算法进行比较,以扩展本文提出的关键发现和建议。