上一话
复现Object Detection,网络架构有:
1.SSD: Single Shot MultiBox Detector(√)
2.RetinaNet
3.Faster RCNN
4.YOLO系列
....
代码:
1.复现SSD
1.2anchor(PriorBox)
这里的anchor表示的是SSD原代码中的 PriorBox 也就是 DefaultBox,中文也说 先验框 或者 默认框,用于在特征图(也可以说是在原图上,因为feature map 和原图的关系可以用比例来表示)上构造box,例如图 1(b),(c)在8x8 feature map与4x4 feature map 产生的anchors,8x8 feature map能框住蓝色gt的猫,4x4 feature map则能框住红色gt的狗,从8x8 feature map到4x4 feature map,特征图越来越小,分辨率越来越低,语义信息越丰富。

feature map size
图2 为SSD的网络架构,可以看出conv4_3的feature map size为38x38,conv7的feature map size为19x19,conv8_2的feature map size为10x10,conv9_2的feature map size为5x5,conv10_2的feature map size为3x3,conv11_2的feature map size为1x1.
conv feature map size
conv4_3 38x38
conv7 19x19
conv8_2 10x10
conv9_2 5x5
conv10_2 3x3
conv11_2 1x1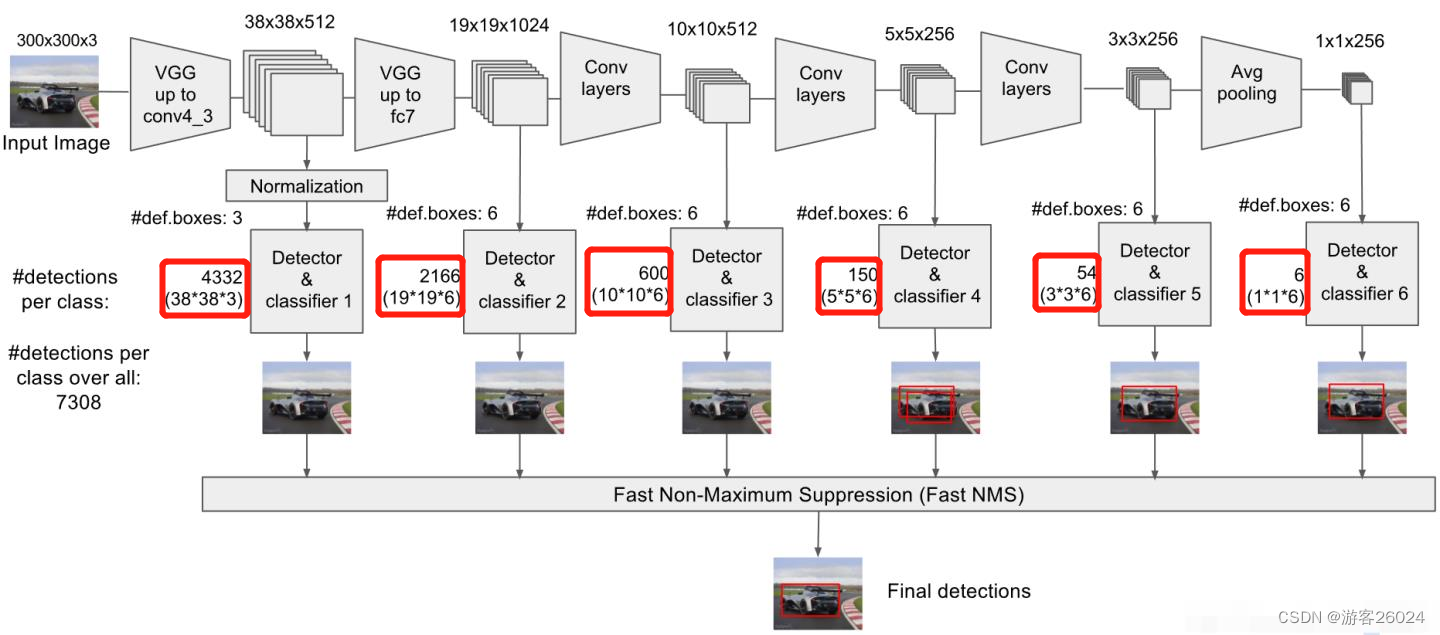
表示 先验框 或者 默认框(anchor)与原图的比例
SSD论文中给出公式
其中 表示特征图个数,一般为5,因为conv4_3的特征图是单独设置
表示先验框 或者 默认框 (anchor)与原图比例的最小值,0.2
表示先验框 或者 默认框 (anchor)与原图比例的最大值,0.9
但是这个 也可以有其他方式设置,比如按照数据集来设置
voc数据集的 ,在代码中表示min_sizes
,在代码中表示max_sizes
coco数据集的 ,在代码中表示min_sizes
,在代码中表示max_sizes
aspect ratios 表示先验框 或者 默认框 (anchor)长宽比 可设置为 ,
其中conv4_3的feature map可设置4个长宽比
conv7的 feature map可设置的6个长宽比
conv8_2的feature map可设置的6个长宽比
conv9_2的feature map可设置的6个长宽比
conv10_2的feature map可设置的4个长宽比
conv11_2的feature map可设置的4个长宽比
所以当aspect ratios为1时不仅有 这个比例,还有
例如voc数据集所设置的anchor长宽比,其中
feature map anchor s_k{aspect ratios} number anchor
38*38 21{1/2,1,2}, sqrt(21*45){1} 38*38*4
19*19 45{1/3,1/2,1,2,3}, sqrt(45*99){1} 19*19*6
10*10 99{1/3,1/2,1,2,3}, sqrt(99*153){1} 10*10*6
5*5 153{1/3,1/2,1,2,3}, sqrt{153*207}{1} 5*5*6
3*3 207{1/2,1,2}, sqrt(207*261){1} 3*3*4
1*1 261{1/2,1,2}. sqrt(261*315){1} 1*1*4
total number anchors: 38*38*4+19*19*6+10*10*6+5*5*6+3*3*4+1*1*4=8732anchor根据长宽比所产生的w与h
当aspect ratios !=1时,w = s_k * sqrt(aspect ratios) , h = s_k / sqrt(aspect ratios) 。
当aspect_ratios == 1时,w,h = s_k, 或者 w,h= sqrt(s_k*s_(k+1))
每组anchor的中心点 , 由上计算
,+0.5是为将其移至中心点,或者可以解释为误差
概述:首先计算f_k(300/step_i),在通过f_k计算每组anchor的中心点cx,cy,计算两个aspect ratios=1时的s_k,再通过s_k计算w,h;接着计算aspect ratios! =1时的s_k,再通过s_k计算w,h。
原代码
class PriorBox(object):
"""Compute priorbox coordinates in center-offset form for each source
feature map.
"""
def __init__(self, cfg):
super(PriorBox, self).__init__()
self.image_size = cfg['min_dim']
# number of priors for feature map location (either 4 or 6)
self.num_priors = len(cfg['aspect_ratios'])
self.variance = cfg['variance'] or [0.1]
self.feature_maps = cfg['feature_maps']
self.min_sizes = cfg['min_sizes']
self.max_sizes = cfg['max_sizes']
self.steps = cfg['steps']
self.aspect_ratios = cfg['aspect_ratios']
self.clip = cfg['clip']
self.version = cfg['name']
for v in self.variance:
if v <= 0:
raise ValueError('Variances must be greater than 0')
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps):
for i, j in product(range(f), repeat=2):
f_k = self.image_size / self.steps[k]
# unit center x,y
cx = (j + 0.5) / f_k
cy = (i + 0.5) / f_k
# aspect_ratio: 1
# rel size: min_size
s_k = self.min_sizes[k]/self.image_size
mean += [cx, cy, s_k, s_k]
# aspect_ratio: 1
# rel size: sqrt(s_k * s_(k+1))
s_k_prime = sqrt(s_k * (self.max_sizes[k]/self.image_size))
mean += [cx, cy, s_k_prime, s_k_prime]
# rest of aspect ratios
for ar in self.aspect_ratios[k]:
mean += [cx, cy, s_k*sqrt(ar), s_k/sqrt(ar)]
mean += [cx, cy, s_k/sqrt(ar), s_k*sqrt(ar)]
# back to torch land
output = torch.Tensor(mean).view(-1, 4)
if self.clip:
output.clamp_(max=1, min=0)
return output
if __name__ == "__main__":
# SSD300 CONFIGS
voc = {
'num_classes': 21,
'lr_steps': (80000, 100000, 120000),
'max_iter': 120000,
'feature_maps': [38, 19, 10, 5, 3, 1],
'img_size': 300,
'steps': [8, 16, 32, 64, 100, 300],
'min_sizes': [30, 60, 111, 162, 213, 264],
'max_sizes': [60, 111, 162, 213, 264, 315],
'aspect_ratios': [[2], [2, 3], [2, 3], [2, 3], [2], [2]],
'variance': [0.1, 0.2],
'clip': True,
'name': 'VOC',
}
box = PriorBox(voc)
print('box.shape:', box().shape)
print('box:\n',box())结果
box.shape: torch.Size([8732, 4])
box:
tensor([[0.0133, 0.0133, 0.1000, 0.1000],
[0.0133, 0.0133, 0.1414, 0.1414],
[0.0133, 0.0133, 0.1414, 0.0707],
...,
[0.5000, 0.5000, 0.9612, 0.9612],
[0.5000, 0.5000, 1.0000, 0.6223],
[0.5000, 0.5000, 0.6223, 1.0000]])修改后的代码
import torch
from torch import nn
from math import sqrt as sqrt
import torch.nn.functional as F
from torch.cuda.amp import autocast
from itertools import product as product
class SSDAnchors(nn.Module):
"""
anchors: 38x38x4+19x19x6+10x10x6+5x5x6+3x3x4+1x1x4=8732
"""
def __init__(self, img_size=300, feature_maps=[38, 19, 10, 5, 3, 1],
steps=[8, 16, 32, 64, 100, 300],
aspect_ratios=[[2], [2, 3], [2, 3], [2, 3], [2], [2]],
clip=True, variance=[0.1, 0.2], version='VOC',
min_sizes=[30, 60, 111, 162, 213, 264],
max_sizes=[60, 111, 162, 213, 264, 315],
):
super(SSDAnchors, self).__init__()
if img_size == 300:
self.img_size = img_size
else:
self.img_size = 300
if feature_maps == [38, 19, 10, 5, 3, 1]:
self.feature_maps = feature_maps
else:
self.feature_maps = [38, 19, 10, 5, 3, 1]
if steps == [8, 16, 32, 64, 100, 300]:
self.steps = steps
else:
self.steps = [8, 16, 32, 64, 100, 300]
if aspect_ratios == [[2], [2, 3], [2, 3], [2, 3], [2], [2]]:
self.aspect_ratios = aspect_ratios
else:
self.aspect_ratios = [[2], [2, 3], [2, 3], [2, 3], [2], [2]]
if clip == True:
self.clip = clip
else:
self.clip = True
if variance == [0.1, 0.2]:
self.variance = variance
else:
self.variance = [0.1, 0.2]
if version == 'VOC':
self.version = version
if min_sizes == [30, 60, 111, 162, 213, 264]:
self.min_sizes = min_sizes
else:
self.min_sizes = [30, 60, 111, 162, 213, 264]
if max_sizes == [60, 111, 162, 213, 264, 315]:
self.max_sizes = max_sizes
else:
self.max_sizes = [60, 111, 162, 213, 264, 315]
elif version == 'COCO':
self.version = version
if min_sizes == [21, 45, 99, 153, 207, 261]:
self.min_sizes = min_sizes
else:
self.min_sizes = [21, 45, 99, 153, 207, 261]
if max_sizes == [45, 99, 153, 207, 261, 315]:
self.max_sizes = max_sizes
else:
self.max_sizes = [45, 99, 153, 207, 261, 315]
else:
raise ValueError("Dataset type is error!")
@autocast()
def forward(self):
mean = []
for k, f in enumerate(self.feature_maps):
for i, j in product(range(f), repeat=2):
# feature_map of k-th
f_k = self.img_size / self.steps[k]
# center
cx = (i + 0.5) / f_k
cy = (j + 0.5) / f_k
# r==1, size = s_k
s_k = self.min_sizes[k] / self.img_size
mean += [cx, cy, s_k, s_k]
# r==1, size = sqrt(s_k * s_(k+1))
s_k_plus = self.max_sizes[k] / self.img_size
s_k_prime = sqrt(s_k * s_k_plus)
mean += [cx, cy, s_k_prime, s_k_prime]
# ration != 1
for r in self.aspect_ratios[k]:
mean += [cx, cy, s_k * sqrt(r), s_k / sqrt(r)]
mean += [cx, cy, s_k / sqrt(r), s_k * sqrt(r)]
# torch
anchors = torch.tensor(mean).view(-1, 4)
# norm [0,1]
if self.clip:
anchors.clamp_(max=1, min=0)
# anchor boxes
return anchors
if __name__ == "__main__":
# voc
anchors1 = SSDAnchors(version='VOC')
print(anchors1.min_sizes)
print(anchors1().shape)
print(anchors1())
# coco
anchor2 = SSDAnchors(version='COCO')
print(anchor2.min_sizes)
print(anchor2().shape)
print(anchor2())修改后的结果
# voc
[30, 60, 111, 162, 213, 264]
torch.Size([8732, 4])
tensor([[0.0133, 0.0133, 0.1000, 0.1000],
[0.0133, 0.0133, 0.1414, 0.1414],
[0.0133, 0.0133, 0.1414, 0.0707],
...,
[0.5000, 0.5000, 0.9612, 0.9612],
[0.5000, 0.5000, 1.0000, 0.6223],
[0.5000, 0.5000, 0.6223, 1.0000]])
# coco
[21, 45, 99, 153, 207, 261]
torch.Size([8732, 4])
tensor([[0.0133, 0.0133, 0.0700, 0.0700],
[0.0133, 0.0133, 0.1025, 0.1025],
[0.0133, 0.0133, 0.0990, 0.0495],
...,
[0.5000, 0.5000, 0.9558, 0.9558],
[0.5000, 0.5000, 1.0000, 0.6152],
[0.5000, 0.5000, 0.6152, 1.0000]])
Process finished with exit code 0注意:
此代码生成的anchor,产生的中心点的坐标是在0-1之间归一化的(cx, cy, w, h)。若要投射到300x300的img上,需要将其乘以300。
未完...