目录

前言
本项目基于Faster R-CNN模型,通过RPN网络(Region Proposal Network)获取图片中的候选区域,并利用RestNet50模型提取特征,旨在实现对生活垃圾的智能分拣。
在该项目中,我们使用Faster R-CNN模型,它是一种经典的目标检测算法,能够同时进行物体检测和区域提议。通过RPN网络,我们能够在输入图片中快速识别出潜在的候选区域,这些区域可能包含生活垃圾物品。
接下来,我们使用RestNet50模型进行特征提取。RestNet50是一种深度卷积神经网络,具有较强的特征提取能力。我们将候选区域输入RestNet50模型,提取出高维特征表示,以捕捉垃圾物品的关键信息。
通过将候选区域和其对应的特征输入到后续的分类器中,我们可以对生活垃圾进行智能分拣。分类器可以根据特征表示判断每个候选区域属于哪一类垃圾,例如可回收物、厨余垃圾、有害垃圾等,实现智能化的垃圾分类过程。
本项目的目标是利用Faster R-CNN模型和RestNet50模型的结合,通过智能化的图片分析和特征提取,实现对生活垃圾的智慧分拣。这项技术有助于提高垃圾处理的效率和准确性,为环境保护和资源回收做出贡献。
总体设计
本部分包括系统整体结构图和系统流程图。
系统整体结构图
系统整体结构如图所示。
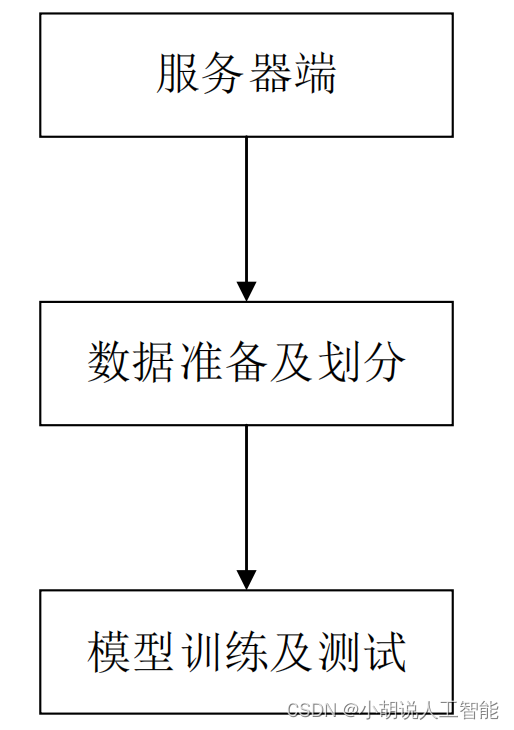
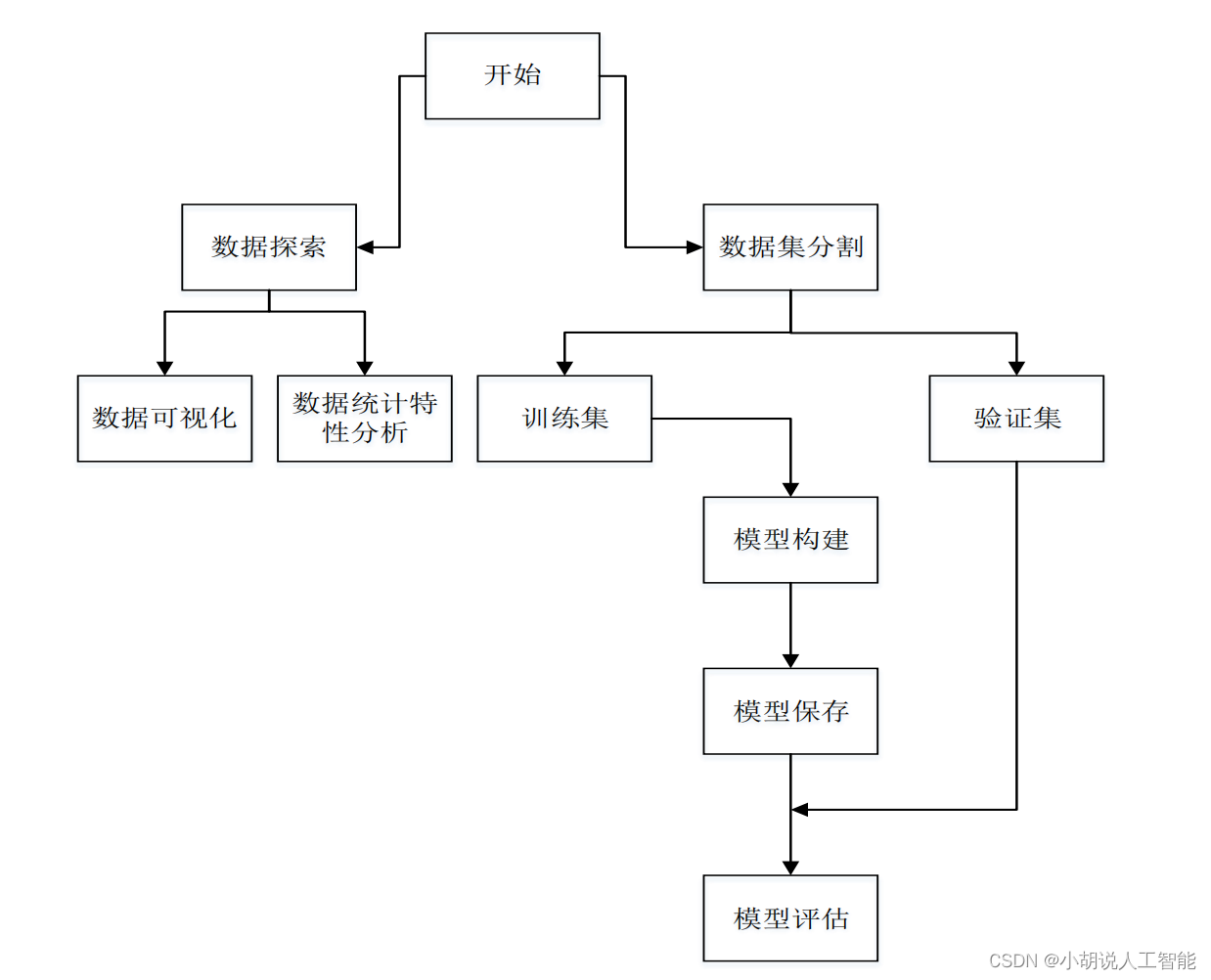
系统流程图
系统流程如图所示。
运行环境
本部分包括硬件环境和 Python 环境。
1. 硬件环境
FasterRCNN 对计算要求较高,有一部分是 Restnet50 的卷积层。必须使用较大内存的GPU 才可以完成训练。在本项目中,用华为云提供的模型训练服务(GPU tesla P100)实现,链接:https://www.hwtelcloud.com/products/mts。
2. Python 环境
使用软件的主要版本如下:
Python==3.6
TensorFlow==1.13.1
Keras==2.0.3
CV2
naie(是华为针对器模型训练服务所设计的库)
模块实现
本项目包括 5 个模块:数据预处理、数据加载、模型构建、模型保存及训练、模型加载及调用,下面分别给出各模块的功能介绍及相关代码。
1. 数据预处理
数据下载地址: https://pan.baidu.com/s/1ZAbzYMLv0fcLFJsu64u0iw,提取码:yba3
数据信息被存储在 json 文件中,使用 python 和 jupyter notebook 对 json 文件进行解析,并进行数据探索。经过分析,获取的垃圾数据集中单类垃圾共有 80000 张训练集图片,204种分类。且每种分类的垃圾图片数量基本相同,约为 300 张左右。由于时间短,仅使用了10种类别的单类图片用于训练和验证,这 10 种类别分别是瓜子壳、核桃、花生壳、面包、饼干、菌菇类、菜叶、菜根、甘蔗皮、中药材、枣核。其中训练集有 3000 张,测试集有843张,如图所示。
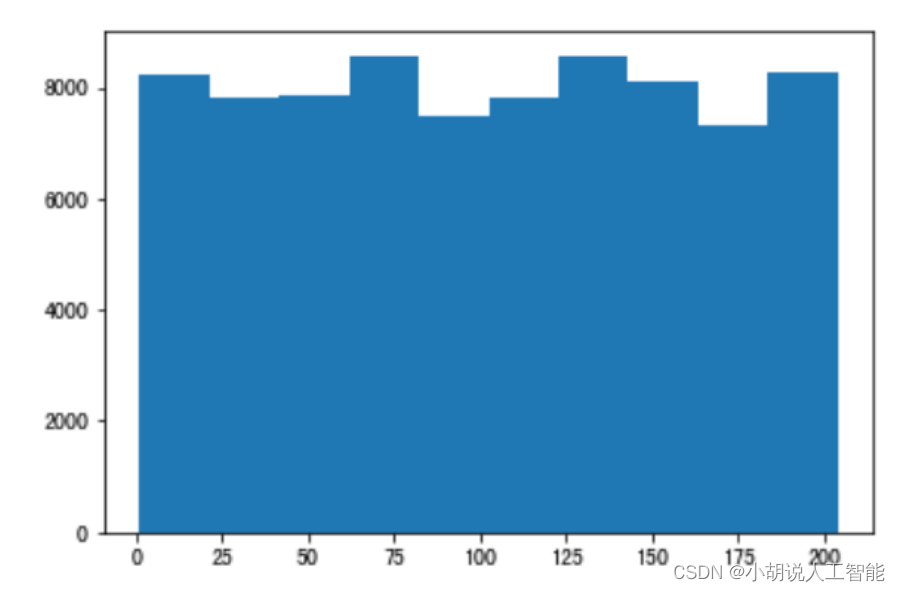
由于 FasterRCNN 使用 anchor 机制,即锚框。需要获取样本尺寸信息作为先验信息,设计锚框。因此,使用 matplotlib 绘制出关于样本尺寸的散点图和直方图。如图1~图 3 所示。
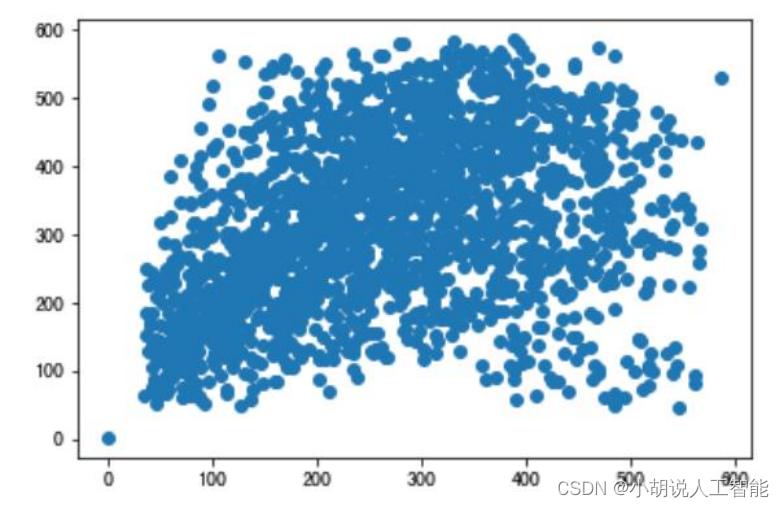
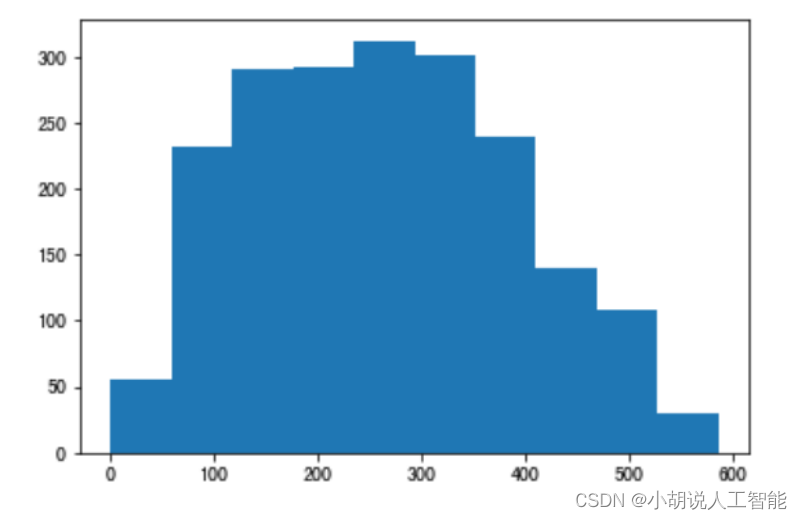
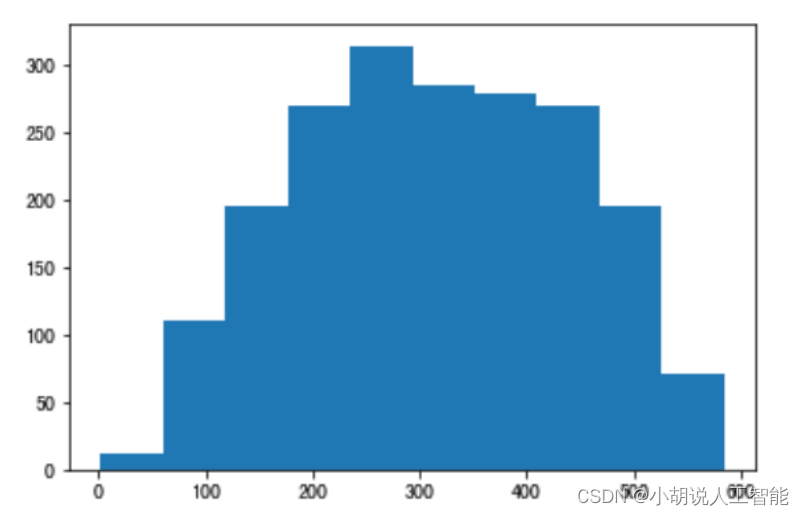
锚框机制,需要预先提供九个不同尺寸的锚框,应尽量贴合目标的尺寸。使用 K-means算法进行聚类,获得合适的锚框,如下图所示。
#使用KMeans确定anchor的长宽
from sklearn.cluster import KMeans
from sklearn.externals import joblib
data=np.hstack((np.array(widths).reshape((-1,1)),np.array(heights).reshape((-1,1))))
clf = KMeans(n_clusters=9)
s = clf.fit(data)
centers=clf.cluster_centers_
plt.scatter(widths,heights,alpha=0.2)
plt.scatter([i[0] for i in centers ],[i[1] for i in centers ],c='r')
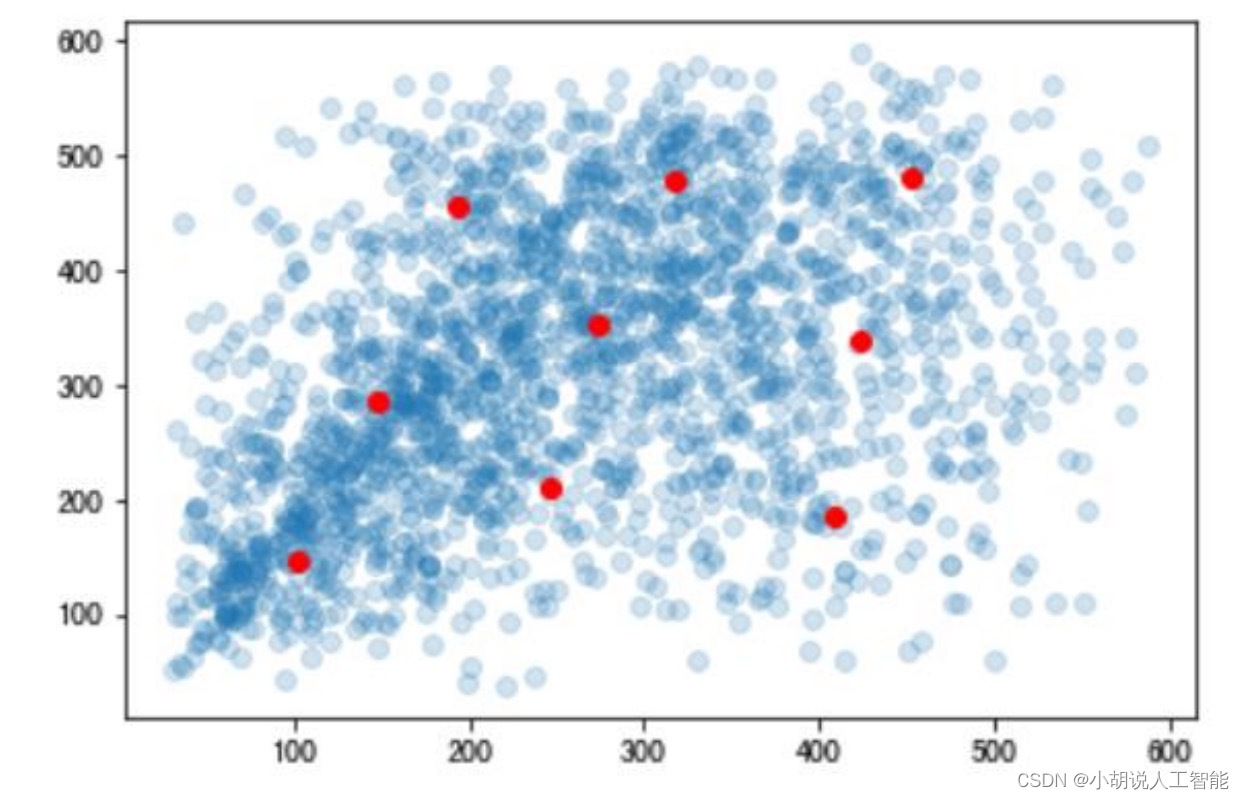
结合Kmeans结果,并进行手动调整,可以设计锚框尺寸。
#锚框尺寸
self.anchor_box_scales = [150, 300, 435]
#锚框比例
self.anchor_box_ratios = [[1, 1], [1, 0.91], [1, 1.25]]
2. 数据加载
本项目使用 biendata(https://biendata.com/)的一个比赛,2020 海华 AI 挑战赛垃圾分类。这个比赛,与华为模型训练服务合作,可以直接在华为模型训练平台上下载、读取训练比赛数据。
使用 github 上提供基于 Keras 的 FasterRCNN 模型。该模型需要将图片信息以 VOC2012数据集的格式进行存储,将图片信息转为该格式,代码写在 garbage_dataset.py 中。
def w_voc(self):#将目标的信息写入voc格式数据集中
data_path = 'VOC2012'
print("将目标的信息写入voc格式数据集中")
#annot_path是存放目标信息xml文件的文件夹
annot_path = os.path.join(data_path, 'Annotations_single')
#imgs_path是存放图片的文件夹位置
#imgs_path = os.path.join(data_path, 'JPEGImages')
#imgset_path是存放图片名的文件夹
imgsets_path_trainval = os.path.join(data_path, 'ImageSets', 'single', 'trainval.txt')
annot_indexs=0#用来标记新图片的起始目标信息位置
if os.listdir(annot_path) != None:
os.system('rm -f '+annot_path+'/*')
with open(self.json_dir,'r',encoding='utf-8') as fp:
self.json_dict = json.load(fp)
with open(imgsets_path_trainval,'w') as fp:#将图片名存入imgsets中
for img in self.json_dict['images']:
fp.write(img['file_name'].split('/')[1]+'\n')
for img in self.json_dict['images']:
annots=[]
file_name=img['file_name'].split('/')[1]
xml_name=file_name.split('.')[0]+'.xml'
for annot in self.json_dict['annotations'][annot_indexs:]:
#获取每张图片下的目标信息
if str(annot['image_id'])==file_name.split('.')[0]:
annots.append(annot)
annot_indexs+=1#更新目标信息索引
else:
break
#将图片信息与目标信息写入xml文件中,并存入annotations文件夹
在 FasterRCNN 中对 VOC 格式数据读取代码存在 keras_frcnn/pascal_voc_parser.py。再通 过 keras_frcnn/data_augment.py 读 取 每 一 张 图 片 信 息 和 相 应 目 标 信 息 ,keras_frcnn/data_generators.py 作为发生器。
3. 模型构建
数据加载进模型之后,需要定义模型结构,并优化损失函数。
1)定义模型结构
从keras_frcnn/resnet.py 调用相关的模型层。
from keras_frcnn import resnet as nn
#定义基本网络(此处为Resnet,可以是VGG,Inception等)
shared_layers = nn.nn_base(img_input, trainable=True)
#定义RPN,建立在基础层上
num_anchors=len(cfg.anchor_box_scales)* len(cfg.anchor_box_ratios)
rpn = nn.rpn(shared_layers, num_anchors)
classifier = nn.classifier(shared_layers, roi_input, cfg.num_rois, nb_classes=len(classes_count), trainable=True)
model_rpn = Model(img_input, rpn[:2])
model_classifier = Model([img_input, roi_input], classifier)
#这是一个同时包含RPN和分类器的模型,用于加载/保存模型的权重
model_all = Model([img_input, roi_input], rpn[:2] + classifier)
2. 损失函数及模型优化
#优化器
optimizer = Adam(lr=1e-5)
optimizer_classifier = Adam(lr=1e-5)
model_rpn.compile(optimizer=optimizer,
loss=[losses_fn.rpn_loss_cls(num_anchors), losses_fn.rpn_loss_regr(num_anchors)])
model_classifier.compile(optimizer=optimizer_classifier,
loss=[losses_fn.class_loss_cls, losses_fn.class_loss_regr(len(classes_count)-1)],
metrics={
'dense_class_{}'.format(len(classes_count)):'accuracy'})
model_all.compile(optimizer='sgd', loss='mae')
4. 模型训练及保存
本部分包括模型训练和模型保存。
1)模型训练
#相关参数
epoch_length = 1000
num_epochs = int(cfg.num_epochs)
iter_num = 0
#调用模型进行训练
X, Y, img_data = next(data_gen_train)
loss_rpn = model_rpn.train_on_batch(X, Y)
P_rpn = model_rpn.predict_on_batch(X)
2)模型保存
model_all.save_weights(cfg.model_path)
mox.file.copy(cfg.model_path, os.path.join(Context.get_model_path(), 'model_frcnn.vgg.hdf5'))
5. 模型加载与调用
Keras 需要先将网络定义好,才能加载模型。相关代码在 test_frcnn_kitti.py 中
1)模型加载
#定义RPN,建立在基础层上 num_anchors=len(cfg.anchor_box_scales)*len(cfg.anchor_box_ratios)
rpn_layers = nn.rpn(shared_layers, num_anchors)
classifier=nn.classifier(feature_map_input,roi_input, cfg.num_rois, nb_classes=len(class_mapping),trainable=True)
model_rpn = Model(img_input, rpn_layers)
model_classifier_only=Model([feature_map_input,roi_input],classifier)
model_classifier= Model([feature_map_input, roi_input], classifier)
print('Loading weights from {}'.format(cfg.model_path))
model_rpn.load_weights(cfg.model_path, by_name=True)
model_classifier.load_weights(cfg.model_path, by_name=True)
model_rpn.compile(optimizer='sgd', loss='mse')
model_classifier.compile(optimizer='sgd', loss='mse')
2)模型测试
def predict_single_image(img_path, model_rpn, model_classifier_only, cfg, class_mapping):
#将空间金字塔池应用于建议的区域
boxes = dict()
for jk in range(result.shape[0] // cfg.num_rois + 1):
rois = np.expand_dims(result[cfg.num_rois * jk:cfg.num_rois * (jk + 1), :], axis=0)
if rois.shape[1] == 0:
break
if jk == result.shape[0] // cfg.num_rois:
curr_shape = rois.shape
target_shape = (curr_shape[0], cfg.num_rois, curr_shape[2])
rois_padded = np.zeros(target_shape).astype(rois.dtype)
rois_padded[:, :curr_shape[1], :] = rois
rois_padded[0, curr_shape[1]:, :] = rois[0, 0, :]
rois = rois_padded
[p_cls, p_regr] = model_classifier_only.predict([F, rois])
for ii in range(p_cls.shape[1]):
if np.max(p_cls[0, ii, :]) < bbox_threshold or np.argmax(p_cls[0, ii, :]) == (p_cls.shape[2] - 1):
continue
cls_num = np.argmax(p_cls[0, ii, :])
if cls_num not in boxes.keys():
boxes[cls_num] = []
(x, y, w, h) = rois[0, ii, :]
try:
(tx, ty, tw, th) = p_regr[0, ii, 4 * cls_num:4 * (cls_num + 1)]
tx /= cfg.classifier_regr_std[0]
ty /= cfg.classifier_regr_std[1]
tw /= cfg.classifier_regr_std[2]
th /= cfg.classifier_regr_std[3]
x, y, w, h = roi_helpers.apply_regr(x, y, w, h, tx, ty, tw, th)
系统测试
本部分包括模型准确率和分类别准确率。
1. 模型准确率
通过华为模型训练平台对模型进行测试,并写入result.txt文件中存储,相关代码如下:
true_count=0#使用测试集进行准确度的测试,并存入文件中
with open('./val_single.txt','r') as f:
val_data=f.readlines()
img_count=len(val_data)
for index,val in enumerate(val_data):
if index%50 ==0:
K.clear_session()
test_cls=predict(val.split()[0])
if int(test_cls)==int(val.split()[1]):
true_count+=1
with open('/cache/result.txt','a') as f:
f.write("%s %s %s\n"%(val.split()[0],val.split()[1],test_cls)) accuray=true_count/img_count
with open('/cache/result.txt','a') as f:
f.write("val_lenght:%s,accruray:%s"%(img_count,accuray))
数据属性,分别是图片地址,真实标签,识别标签,共有843条数据。以下是部分结果数据,总体准确率为0.840,识别效果比较理想。
/cache/train/images_withoutrect/24726.png 63 63
/cache/train/images_withoutrect/12114.png 3 3
/cache/train/images_withoutrect/24671.png 63 63
/cache/train/images_withoutrect/13764.png 51 51
/cache/train/images_withoutrect/12759.png 19 19
/cache/train/images_withoutrect/11339.png 2 2
/cache/train/images_withoutrect/11451.png 2 2
/cache/train/images_withoutrect/14072.png 50 0
......
val_lenght:843,accruray:0.8398576512455516
2. 分类别准确率
FasterRcnn 模型使用 anchor 机制,anchor 的设置和不同类别识别的准确率息息相关。在这里对分类别准确率进行分析,并计算它们的真实边框和锚点边框的差距。
相关代码如下:
#对结果按类别计算准确度
for category_name in message['categories']:
categories_name.append([category_name['id'],category_name['name']])
for category in categorys:
print(categories_name[category-1],category)
labels=[]
categorys_accuray={
}
with open('result.txt','r') as f:
results=f.readlines()[:-1]
for result in results:
path,true_label,test_label=result.split()
true_label=int(true_label)
test_label=int(test_label)
if true_label not in labels:
labels.append(true_label)
for label in labels:
categorys_img_count=0
categorys_true_count=0
for result in results:
path,true_label,test_label=result.split()
true_label=int(true_label)
test_label=int(test_label)
if true_label==label:
categorys_img_count+=1
if true_label==test_label:
categorys_true_count+=1 categorys_accuray[categories_name[label-1][1]]=categorys_true_count/categorys_img_count
print(categorys_accuray)
结果:
{‘中药材’: 0.9878048780487805, ‘花生壳’: 1.0, ‘菌菇类’: 0.8901098901098901,
‘面包’: 0.6593406593406593, ‘核桃’: 1.0, ‘菜叶’: 0.8055555555555556,
‘菜根’:0.5409836065573771, ‘甘蔗皮’: 0.9761904761904762,
‘瓜子壳’:0.5106382978723404,‘饼干’: 0.9690721649484536}
面包、菜根、瓜子壳的准确率较低。下面将三种类别的真实边框与锚点进行可视化比较,如图 4 和图 5 所示。
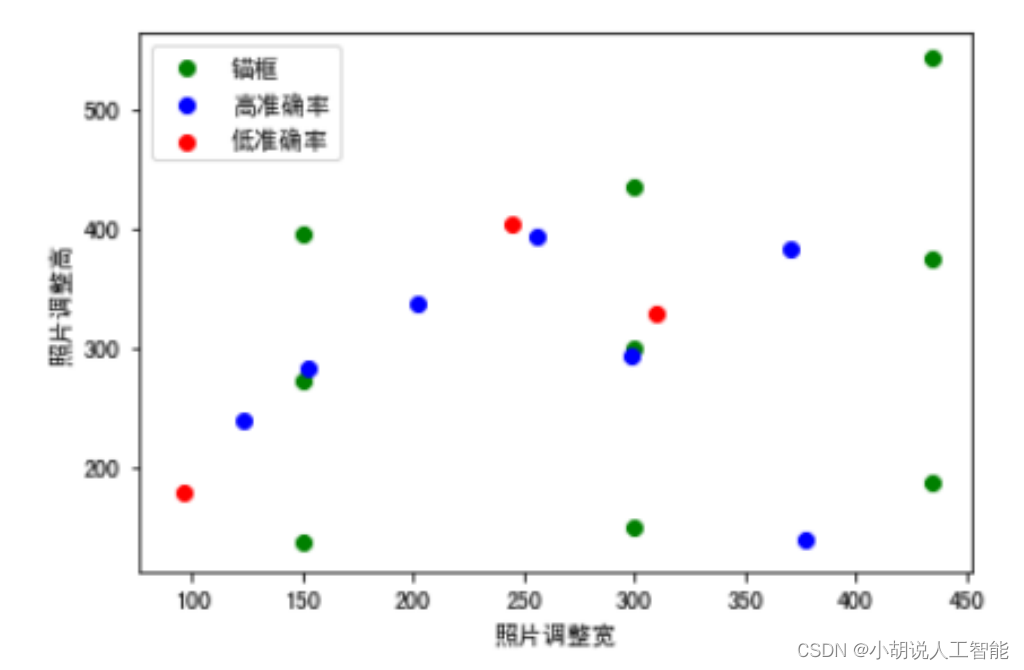
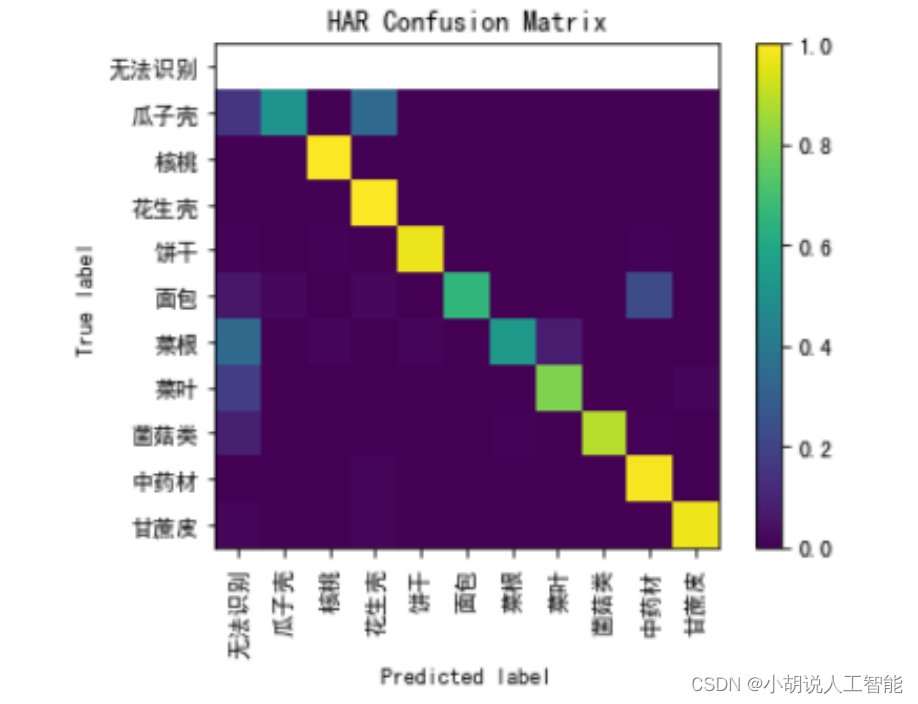
图 4 中可以看到左下角圆点,偏离较远,由参数知道此点为瓜子壳。偏离 anchor 较远的点容易出现无法识别的现象,例如瓜子壳、菜根等容易无法识别。图 5 中瓜子壳和花生壳容易混淆,面包和中药材容易混淆,菜根和菜叶容易混淆。正是由于无法识别混淆的情况,使得瓜子壳、菜根、面包准确率较低。
工程源代码下载
其它资料下载
如果大家想继续了解人工智能相关学习路线和知识体系,欢迎大家翻阅我的另外一篇博客《重磅 | 完备的人工智能AI 学习——基础知识学习路线,所有资料免关注免套路直接网盘下载》
这篇博客参考了Github知名开源平台,AI技术平台以及相关领域专家:Datawhale,ApacheCN,AI有道和黄海广博士等约有近100G相关资料,希望能帮助到所有小伙伴们。