
本文源自:Dronecode
原作者:Ramón Roche
编辑:阿木实验室
2018年2月,在参加2018年纽伦堡嵌入式展会之前,我们访问了瑞士苏黎世的一些Dronecode会员,了解了下这些团队的目标和项目。
PX4和Pixhawk都曾在这里创建,在这里,我们仍然感受到这种传统氛围。这是一个令人印象深刻的生态系统。部分公司更是其领域的领导者之一。 这里拥有训练有素的人才资源,尤其是在机器人,控制系统和计算机视觉领域处于世界级水平,所以像Yuneec这样的大公司在苏黎世建立了一个研发中心也并不奇怪了。同时,ETH(苏黎世联邦理工学院)也坐落在这座城市,为公司提供着优秀的技术人才。
我们觉得坐落于此的公司都有一个共同点,那就是对建造无人机的热情。Wingtra拥有一群非常专业的技术人才,致力于开发最新,最优秀的产品;Yuneec拥有一支非常先进的团队,他们使用开源技术为优秀的产品带来活力;而Auterion则是与开发社区紧密相连,使他们能够支持核心平台的开发。
我们最后的印象是,苏黎世的公司正在为其他行业设定一个高标准。下面我们一一介绍下这三家机构:
Yuneec Research
我们很高兴见到一个小型但非常高效的团队,他们致力于未来高度集成的无人机系统。在这里,许多伟大的想法集中于同一个房间,我们不难感受到他们持续追求卓越的心情。这是一个支持H520和Yuneec SDK等产品的团队,并且正在积极贡献于Dronecode平台的每一部分。
他们有许多不同的技能将用于无人机行业的精密工具,他们的专长是:
视觉定位 - 使用视觉输入判断无人机位置。
避障 - 检测并安全避开障碍物。
高级路径规划 - 始终获得完美的镜头。
飞行控制 - 为我们的无人机保证最佳的成型控制器,并与PX4社区紧密合作,帮助定义用于视觉集成的API。
Yuneec Research扁平的层级和动态的工作环境让他们的办公室感觉像是一个硅谷初创公司,它有着许多真正的“改变世界”的问题需要解决并拥有着积极的心态。ETH能为行业提供顶尖人才的说法并不夸张,您只需停在Yuneec Research办公室即可了解苏黎世联邦理工学院的工程毕业生如何培养与开源社区紧密合作的创新环境。
Wingtra
在Wingtra,Wingtranauts专业团队从事开发,生产和销售测量级的高精度VTOL无人机。Wingtra于2017年初进入市场,并在全球销售。最近Wingtra募集了额外的580万美元以满足2018年的需求,并扩大了其遍布全球的分销网络。
关于他们最新推出的WingtraOne PPK,Wingtra首席技术官ArminAmbühl说到,通过最新的升级,Wingtra的无人机WingtraOne PPK可以提供在无人机摄影测量中从未实现的东西 ——覆盖范围广,分辨率高,精确度极高。“例如,我们可以在一个小时的飞行中将240个美式橄榄球场的面积映射出来,并且可以放大并看到地上的硬币。更甚的是,我们能得到硬币的确切坐标,所以我们可以很容易地在现场找到它“,Armin用更简单的语言解释道。现WingtraOne PPK已经通过Wingtra直接或通过分销渠道间接供客户使用。

在这里,给大家介绍下WingtraOne PPK(后差分)无人机(源自泰伯网)
前所未有的图像分辨率和飞行覆盖率组合
该无人机能以低至1厘米的像素分辨率进行摄影测量,单架次每小时可飞行1.3平方公里(相当于240个足球场)。另外两个组合是:0.7cm 像素分辨率覆盖1平方公里, 3cm像素分辨率覆盖4平方公里。
Wingtra公司称,这个指标在行业内处于领先地位,之前没有一款无人机,可以实现单架次覆盖范围如此广、且精度如此高的摄影测量。
垂直起降
目前,市面上的无人机主要分为两种:固定翼和多旋翼。其中,固定翼无人机覆盖区域广,但数据精度相对较低;而多旋翼无人机正好相反,可以达到很高的数据精度,但只能进行小面积的航测。
WingtraOne 无人机结合了二者的优点,实现了大范围的精确测量。Wingtra的CEO阿米·阿姆布尔(Armin Ambühl)解释说:“此款无人机采用多旋翼模式,垂直起飞和着陆,保证无人机平稳起降。升空后转为固定翼模式进行摄影测量,加大测量覆盖范围。”
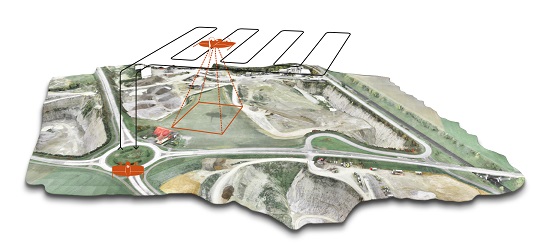
起降和飞行示意图
此外,无人机可实现自动起飞和着陆,无需人为干涉,消除了操作不当的风险。
后差分技术,提升数据精度
WingtraOne无人机就运用了后差分技术(PPK),使机载GNSS数据与附近的参考站数据进行校准,保障每幅图像的精确地理定位。经验证,该无人机的均方差在X/Y方向为1.2厘米,Z方向为2.3厘米,绝对数字表面模型精度高达1厘米。
多数无人机测图需要地面控制点来修正地图,这就需要额外的测量设备且极其耗费时间,同时地面控制点的设定也存在极大的风险。
而后出现了GPS校正技术:实时动态差分(RTK)和后差分(PPK),以达到类似的精度水平。其中,RTK需要实时基站连接,并在飞行过程中校正GPS信号。
后差分则是在飞行后对数据进行校正,独立于基站或基站网络,可靠性和准确性都很高。无论是特殊的飞行准备工作,还是增强后处理步骤,都不需要精确到1厘米的航空地图。

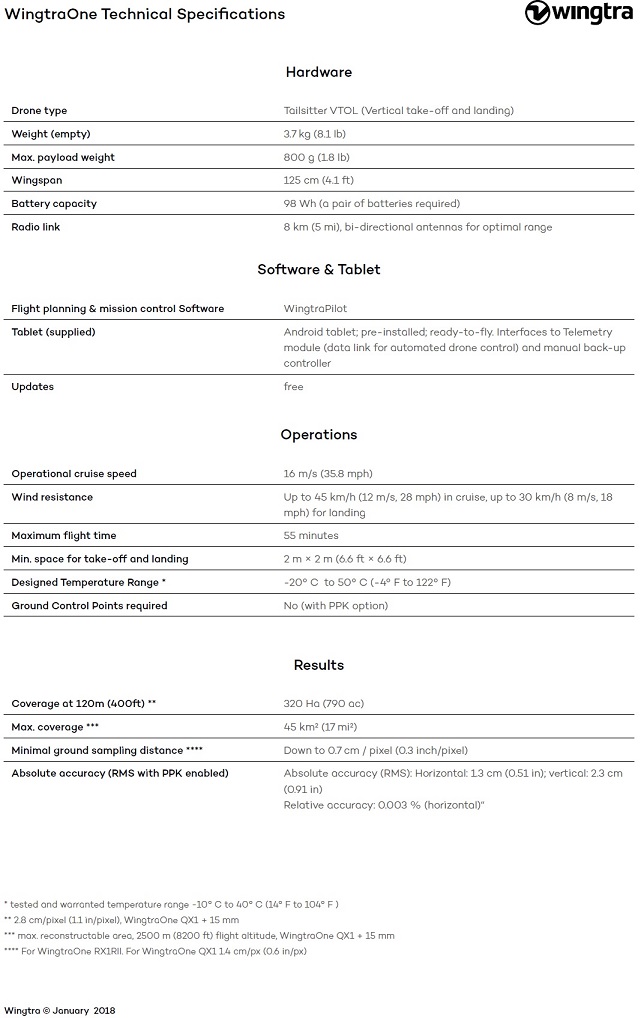
WingtraOne详细参数如下:
Auterion
Auterion是加入Dronecode的最新成员。总部位于苏黎世,负责平台上游的大部分开发。在拜访的过程中,我们有机会签署申请表并正式欢迎他们参加该项目,这正式确立了他们对开放生态系统的承诺。
关于Auterion:
Auterion支持Dronecode平台的核心开发,并为生态系统中的公司提供条件。Auterion与领先的芯片和服务公司合作,为生态系统带来最佳技术和集成。为Dronecode用户提供企业支持,并发布管理和测试PX4的开源发行版。Auterion总部位于瑞士苏黎世,由PX4和Pixhawk的创始人Lorenz Meier和35岁以下的麻省理工学院创新者以及硅谷加州大学伯克利分校MBA和无人机专家Kevin Sartori共同创立。Auterion希望将专业化水平提高一个非常好的水平,就像Red Hat对于Linux的意义一样。
在过去的十年里,Auterion的员工一直为这个生态系统做出贡献,他们授权并创作了PX4和Pixhawk。今天,Auterion希望通过连接开发人员,贡献者和社区,创造更好的技术“开源方式”来实现该行业。