通用同步异步收发器是一个串行通信设备,可以灵活的与外部设备进行全双工数据交换。有别与USART,还有一个UART,它在USART基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输出,我们平时用的串口通信基本都是 UART。串口通信一般是以帧格式传输数据,即一帧一帧传输,每帧包含有起始信号、数据信息、停止信息,可能还有校验信息。
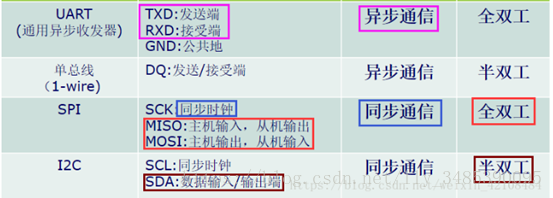
同步通信:带时钟同步信号传输。 --SPI,IIC通信接口
异步通信:不带时钟同步信号。 --UART(通用异步收发器),单总线
STM32异步通信帧格式如下:
- 起始位
- 数据位(8位或者9位)9位是带奇偶校验位
- 奇偶校验位(第10位)奇检验就是保证8位数据位中1的个数为基数个,如果1是基数个则检验位就为0,反之为1;偶检验就是保证8位数据位中1的个数为偶数个,如果1是偶数个则检验位就为0,反之为1;
- 停止位(11位)

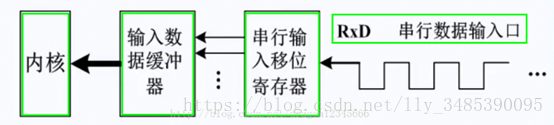
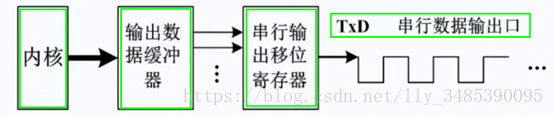
STM32 串口数据收发:
STM32 串口相关结构体:
typedef struct {
uint32_t USART_BaudRate; // 波特率
uint16_t USART_WordLength; // 字长
uint16_t USART_StopBits; // 停止位
uint16_t USART_Parity; // 校验位
uint16_t USART_Mode; // USART 模式
uint16_t USART_HardwareFlowControl; // 硬件流控制
} USART_InitTypeDef;
typedef struct {
uint16_t USART_Clock; // 时钟使能控制
uint16_t USART_CPOL; // 时钟极性
uint16_t USART_CPHA; // 时钟相位
uint16_t USART_LastBit; // 最尾位时钟脉冲
} USART_ClockInitTypeDef;
STM32 串口配置步骤:
1、串口时钟和GPIO时钟使能
2、设置引脚复用器映射:
3、串口参数初始化(GPIO配置)(五大参数)
4、串口参数初始化(六大参数)
5、使能串口
6、开启中断(需要开启中断才需要)
7、配置NVIC中断(四大参数)
8、编写中断处理函数:USARTx_IRQHandler();
9、串口数据收发:
void USART_SendData();//发送数据到串口,DR
uint16_t USART_ReceiveData();//接受数据,从DR读取接受到的数据
10、串口传输状态获取:
FlagStatusUSART_GetFlagStatus();
void USART_ClearITPendingBit();
void USART_config(void)
{
GPIO_InitTypeDef GPIOA_InitStruct;
USART_InitTypeDef USART1_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); /*使能USART1时钟*/
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); /*使能GPIOA的时钟 */
/*将PA9和PA10映射到串口1 */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
GPIOA_InitStruct.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; /*设置GPIO端口模式*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; /*复用推挽输出*/
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIOA_InitStruct);
/*串口参数初始化 */
USART1_InitStruct.USART_BaudRate = 115200; /*波特率设置115200*/
/*无硬件数据流控制*/
USART1_InitStruct.USART_HardwareFlowControl =USART_HardwareFlowControl_None;
USART1_InitStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART1_InitStruct.USART_Parity = USART_Parity_No; //无奇偶校验位
USART1_InitStruct.USART_StopBits = USART_StopBits_1; //一个停止位
USART1_InitStruct.USART_WordLength = USART_WordLength_8b;//字长8位数据格式
USART_Init(USART1, &USART1_InitStruct);
USART_Cmd(USART1, ENABLE); /* 使能USART1 */
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); /*设置中断分组*/
/*使能串口使用的中断*/
NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn; /*中断通道*/
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_Init(&NVIC_InitStruct);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能中断
}
/* 中断服务函数 */
void USART1_IRQHandler(void)
{
uint16_t recv;
if (USART_GetFlagStatus(USART1,USART_IT_RXNE))
{
recv = USART_ReceiveData(USART1); //收数据
USART_SendData(USART1,recv); //发数据
USART_ClearFlag(USART1, USART_IT_RXNE); //清除标志位
}
}