1. 准备
终值:c(∞)
上升时间 tr:响应从峰值的10%上升到峰值的90%所需要的时间;而阶跃响应则是从终值的10%上升到终值的90%所需要的时间;对有振荡的系统,也可以定义为从0到第一次到达终值所需的时间。
峰值时间 tp:响应到达第一个峰值所需的时间。
调节时间 ts:响应到达并保持在终值的正负5%误差带内所需的最短时间;有时也用终值的正负2%。
超调量 σ%:峰值c(tp )超出终值的百分比,即:

题目:
已知二阶系统传递函数为

试分别用游动鼠标法和编程法求取系统的峰值,超调量,上升时间以及调节时间。
2. 编程法:
s = tf('s'); % 用字母 s 构造传递函数
Gs = 3/(s^2+2*s+10); % 构造 Gs
t = 0:0.005:5; % 设置横轴范围和步长
[y,x,t] = step(Gs,t); % 根据步长逐步响应传递函数
[ymax,tp] = max(y); % 获取最大值的点的数据
r=1;
r1=0;
while y(r) < (ymax*0.9) % 过滤小于90%的
if y(r) > (ymax*0.1) % 过滤大于10%的
r1=r1+1;
end;
r=r+1;
end;
rise_time = r1*0.005 % 上升时间
peak_time = (tp-1)*0.005 % 峰值时间
ystable = dcgain(Gs); % 稳态值
max_overshoot = (ymax-ystable)/ystable % 超调量
r2=1001; % 由 (5-0)/0.005+1 求得
while y(r2) > ystable*0.98 && y(r2) < ystable*1.02
% 从稳态倒推回去,求得首次达到并维持在稳态值正负2%的范围的值
r2 = r2 - 1;
end
settle_time = (r2-1)*0.005 % 调节时间
求得:
rise_time = 0.6100
peak_time = 1.0450
max_overshoot = 0.3509
settle_time = 3.5350
3. 游动鼠标法:
游动鼠标法不适合用于plot()命令画出的图形,只能在非plot()函数输出的曲线上求取。
1.获取必要数据
s = tf('s');
Gs = 3/(s^2+2*s+10); % 构造 Gs
t = 0:0.005:5;
step(Gs,t) % 画出图像
[y,x,t] = step(Gs,t);
[ymax,tp] = max(y);
ymax % 峰值
ym10 = ymax * 0.1 % 峰值 10%
ym90 = ymax * 0.9 % 峰值 90%
ystable = dcgain(Gs) % 稳态值
ys98 = ystable * 0.98 % 稳态 -2%
ys102 = ystable * 1.02 % 稳态 +2%
得到图像并求得:
ymax = 0.4053
ym10 = 0.0405
ym90 = 0.3647
ystable = 0.3000
ys98 = 0.2940
ys102 = 0.3060
2.点击工具栏中的数据游标,在图中分别标出纵坐标为 ymax = 0.4053,ym10 = 0.0405,ym90 = 0.3647,ys98 = 0.2940,ys102 = 0.3060 的五点:

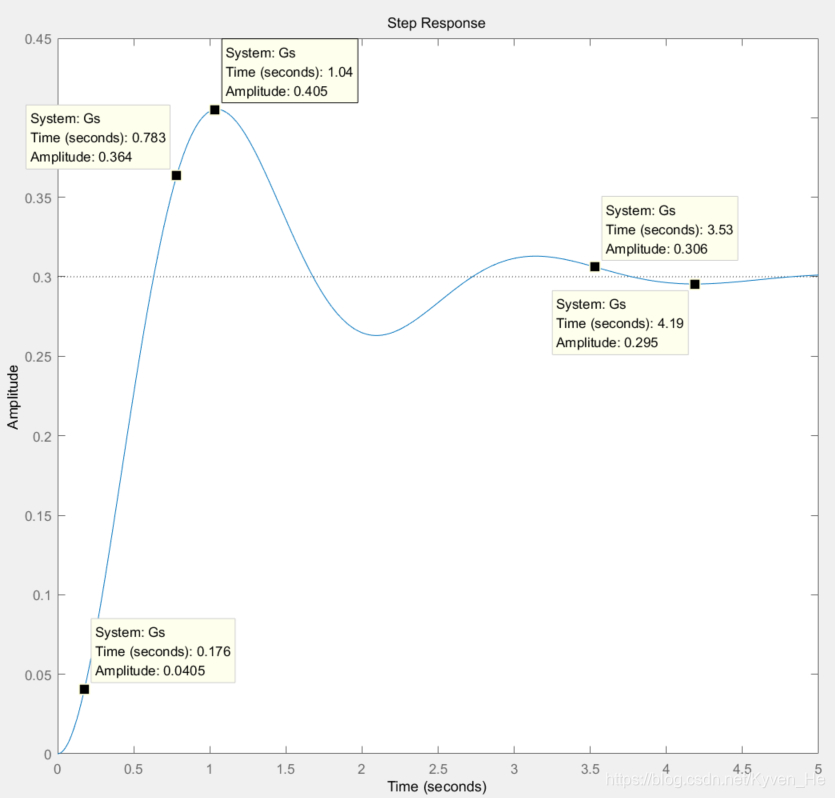
3.收集图像中 Time 对应的 Amplitude 数据,并计算可得:
tr = 0.783 - 0.176 = 0.607
tp = 1.04
ts = 3.53 (因为0.295位于此波谷最低处,而0.295>0.294,故不取4.19)
σ% = (0.405 - 0.3)/0.3 × 100% = 35%