1. Einleitung
1 Hintergrundanalyse des Busplanungssystems:
Da der Bau von städtischen Verkehrseinrichtungen hinter der Wachstumsrate der Verkehrsnachfrage zurückbleibt, verschlechtern sich die städtischen Verkehrsbedingungen von Tag zu Tag. An großen Verkehrskreuzungen und einigen Straßen mit konzentriertem Verkehr treten in unterschiedlichem Maße Verkehrsstaus auf Das Problem ist zu einem Engpass geworden, der die Stadtentwicklung einschränkt.
Das städtische Verkehrssystem ist ein offenes und komplexes System, das aus städtischen Straßennetzen, Fahrzeugen und Managementsystemen besteht. Es gibt viele Möglichkeiten, den Stadtverkehr zu lösen. Beispielsweise sind die derzeitigen Maßnahmen zur Nummernbeschränkung eine der besseren Methoden. Durch die Operation zur Nummernbeschränkung steigt die Anzahl der Personen, die den Bus zu Fuß nehmen, um das Busproblem zu lösen Planung ist besonders notwendig. Die angemessene Lösung des Problems des Planungssystems für den öffentlichen Verkehr ist ein komplexes Problem. Es müssen komplexe Faktoren wie Personen, Fahrzeuge, Straßen usw. berücksichtigt werden. Daher müssen technische High-Tech-Methoden eingesetzt werden, um Probleme im städtischen Straßenverkehr besser zu lösen. Intelligente Verkehrssysteme (ITS) sind heutzutage einer der wichtigsten Wege, um dieses Problem zu lösen.
Die intelligente Planung des Betriebs von Fahrzeugen ist eines der typischen Probleme, die beim intelligenten Versand von Fahrzeugen des öffentlichen Verkehrs gelöst werden müssen. Im Kontext des Intelligent Transportation System (ITS) ist die Formulierung von Busfahrplänen der Kerninhalt des städtischen öffentlichen Verkehrs Versand und ist das tägliche Kommando des öffentlichen Nahverkehrs. Die wichtige Grundlage für den normalen Betrieb von Fahrzeugen ist auch die Grundgrundlage für die Arbeit von Busversendern und Fahrern. Ein angemessener Busfahrplan kann Busunternehmen dabei helfen, die Effizienz der Fahrzeugnutzung zu verbessern, die Betriebskosten zu senken und die Wartezeit der Fahrgäste zu verkürzen, um die Servicequalität zu verbessern.
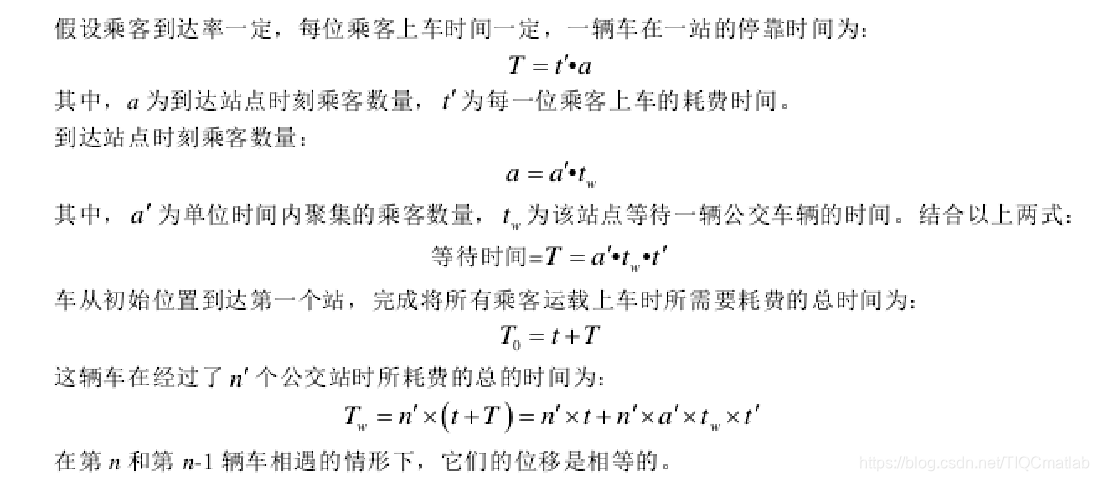
2 Fahrzeugfahrmodell

3 Modell zum Ein- und Aussteigen von Passagieren
4 Anwendungsschritte des
genetischen Algorithmus Der genetische Algorithmus GA ist eine globale Optimierungsmethode, die auf Evolution und Gentheorie basiert.
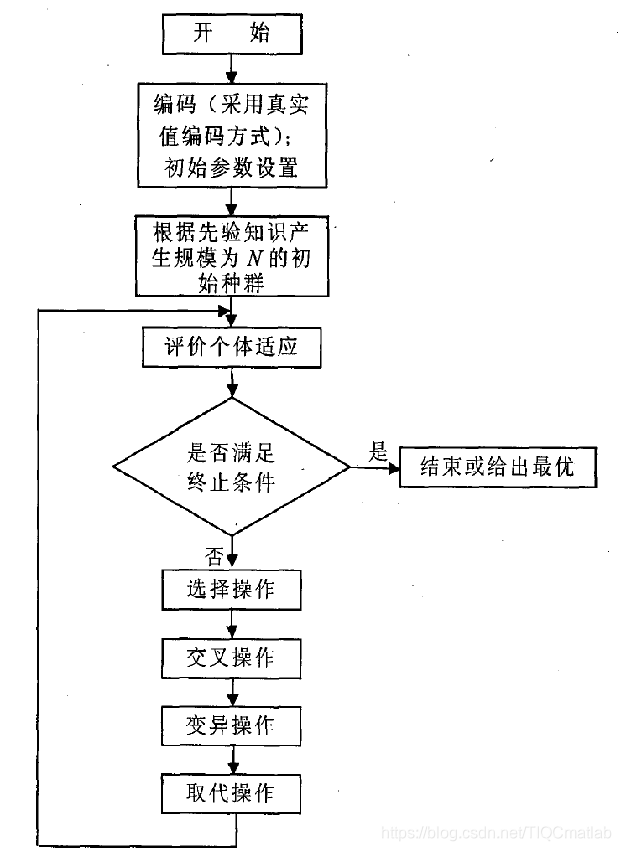
Die grundlegenden Schritte eines einfachen genetischen Algorithmus zur Lösung des Problems lauten wie folgt:
(1) Initialisierung: Generieren Sie zufällig N Individuen als Anfangspopulation P (0), was eine Reihe praktikabler Lösungen für die Zielfunktion darstellt. Setzen Sie den Evolutionsalgebra-Zähler auf Null und setzen Sie die maximale Evolutionsalgebra iter_max;
(2) Individuelle Bewertung: Ersetzen Sie die ursprüngliche Population durch die Zielfunktion und berechnen Sie die Fitness jeder Population in der aktuellen Population gemäß der Fitnessfunktion.
(3) Beurteilung der Beendigungsbedingungen: Bestimmen Sie unter gegebenen Beendigungsbedingungen, ob der Algorithmus die Beendigungsbedingungen erfüllt, und fahren Sie in diesem Fall mit (8) fort.
(4) Auswahloperation: Führen Sie eine Auswahloperation für die Anfangsgruppe durch, gute Personen werden kopiert in großer Anzahl und schlechter Qualität Individuen werden selten kopiert oder sogar eliminiert;
(5) Crossover-Berechnung: Die Crossover-Berechnung wird basierend auf der Crossover-Wahrscheinlichkeit durchgeführt;
(6) Mutationsberechnung: Die Crossover-Berechnung wird basierend auf der Mutationswahrscheinlichkeit durchgeführt;
(7) Gruppe P. (t) wird einer Selektionsberechnung und einer Überkreuzungsberechnung unterzogen. Nach der Mutationsoperation wird die Population P (t + 1) der nächsten Generation, die aus N neuen Individuen besteht, erhalten, dann gehe zu (2), andernfalls gehe zu (4);
(8) Kontinuierliche Evolution wird schließlich die Zielfunktion erhalten, Anpassung Das Individuum mit dem höchsten Grad wird als optimale Lösung oder zufriedenstellende Lösung des Problems ausgegeben, und die Berechnung wird beendet.
Zweitens der Quellcode
% 产生t(i)序列
clc,clear,close all
warning off
Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
delta = 4; % 表示相邻车辆发车间隔之差的限制值
m = 500; % 表示总的发车次数(车次)
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
maxt = 960; % t(i)的最大值
% Loop
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
function flag=test(code)
% code output: 染色体的编码值
global Tmin Tmax delta
x=code; %先解码
flag=1;
for i=3:length(x)
else
flag=0;
end
end
% 产生t(i)序列
function ret=Mutation(pmutation,lenchrom,chrom,sizepop,num,maxgen)
% 本函数完成变异操作
% pcorss input : 变异概率
% lenchrom input : 染色体长度
% chrom input : 染色体群
% sizepop input : 种群规模
% opts input : 变异方法的选择
% pop input : 当前种群的进化代数和最大的进化代数信息
% bound input : 每个个体的上届和下届
% maxgen input :最大迭代次数
% num input : 当前迭代次数
% ret output : 变异后的染色体
function t = pop_meet_conditions(maxt)
global Tmin Tmax delta m tt PP Q cita
% 输入变量说明:
% Tmin = 1; % 表示相邻车辆间发车间隔的最小值(min)
% Tmax = 10; % 表示相邻车辆间发车间隔的最大值(min)
% delta = 4; % 表示相邻车辆发车间隔之差的限制值
% m = 500; % 表示总的发车次数(车次)
% maxt = 960; % t(i)的最大值
% 输出变量说明:
% t为满足条件的个体
a = randi(10); % t(1)第一个值的取值范围设定为1-10之间随机取值
t(1) = a; % 赋值
flag = 1; % 标志变量
% Loop
while flag==1
for i=2:m
flag = 1; % 标志变量
while flag == 1
% Tmin< t(i)-t(i-1) < Tmax
a1 = randi(9);
if a1>Tmin+2 && i==2
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
flag = 0; % i 时间点计算完毕
elseif a1>Tmin+2 && i>2 % |t(i+1)-2*t(i)+t(i-1)|<delta
t(i)=t(i-1)+a1; % Tmin < t(i)-t(i-1) < Tmax
if abs( (t(i)-t(i-1)) -(t(i-1)-t(i-2)) )<delta
flag = 0; % i 时间点计算完毕
end
end
end
end
Drei laufende Ergebnisse




Viertens Bemerkungen
Fügen Sie QQ1564658423 für vollständigen Code oder Schreiben hinzu.
Frühere Überprüfung >>>>>>
[ VRP] Auf dem genetischen Algorithmus von Matlab basierendes Fahrzeugroutenproblem mit Zeitfenster [einschließlich Matlab-Quellcode 002]
[Pfadplanung] basierend auf dem Matlab A * -Algorithmus zur Lösung des dreidimensionalen Pfadplanungsproblems [einschließlich Matlab-Quelle Code 003 Zeitraum]
[Pfad] Planung basierend auf künstlicher Bienenkolonie Matlab Pfadplanung mit Matlab Quellcode [004]
[Pfad] zur Lösung der Planung basierend auf Ameisenkolonie Matlab Problem mit mehreren reisenden Verkäufern [mit Matlab Quelle MTSP 005]
[Pfad] Planung basierend on ant colony matlab Algorithmusbasierte UAV-Pfadplanung [einschließlich Matlab-Quellcode 008]
[Pfadplanung] Matlab-Genalgorithmus zur Lösung mehrerer VRP-Probleme [einschließlich Matlab-Quellcode 010]
[Pfadplanung] Matlab-Genalgorithmus-basierte multizentrische VRP-Lösung [einschließlich Matlab-Quellcode Ausgabe 011]
[Pfadplanung] Dreidimensionale UAV-Pfadplanung basierend auf Matlab-Partikelschwarm [einschließlich Matlab-Quellcode 015]
[ Pfadplanung] Basierend auf Matlab unter Verwendung eines genetischen Algorithmus zur Erstellung eines offenen Fahrzeugroutenproblems mit multipler Logistik Zentren [Einschließlich Matlab-Quellcode 017】
【Pfadplanung】Robotergitter-Pfadplanung basierend auf Matlab-Partikelschwarm 【Einschließlich Matlab-Quellcode 018】
【Pfadplanung】 Basierend auf Matlab-Ameisenkolonie-Algorithmus zur Lösung des kürzesten Pfads 【Einschließlich Matlab-Quellcode 019】
【Pfadplanung】 Basierend auf dem Matlab-Immunalgorithmus Standortproblem des Logistikzentrums [Matlab-Quellcode einschließen 020 Zeitraum]
[Pfadplanung] Matlab künstliche Bienenkolonie-basierte dreidimensionale UAV-Pfadplanung [Matlab-Quellcode einschließen 021 Zeitraum]
[Pfadplanung] Optimale Pfadplanung des Roboters basierend auf dem matalb-Gitterkarten-genetischen Algorithmus [einschließlich Matlab-Quellcode 022]
[ Pfadplanung ] Matlab- Gitterkarten -genetischer Algorithmus-basierter Roboter optimale Pfadplanung [einschließlich Matlab-Quellcode 027 Periode]
[Pfad] Planung basierend auf Ameisenkolonie Matlab Multi-UAV-Angriffe Planung mit Matlab-Quellcode
Dreidimensionale Pfadplanung basierend auf Ameisenkolonie Matlab Matlab-Quelle mit Planung
Planung basierend auf Partikelmatlab Kolonieoptimierung Ameisenkolonien kürzeste Pfadlösung [einschließlich Matlab-Quellcode 076]
[Pfadplanung] basierend auf dem Matlab Ant Colony-Algorithmus zur Lösung des multizentrischen VRP-Problems [einschließlich Matlab-Quellcode 111]
[Pfadplanung] basierend auf dem Matlab Ant Colony-Algorithmus zur Lösung mit Zeitfenstern Multi -Center-VRP-Problem [Einschließlich Matlab-Quellcode 112]
[Pfadplanung] Basierend auf dem Matlab-Ameisenkolonie-Algorithmus zur Lösung des Multicenter-VRP-Problems mit Zeitfenster [Einschließlich Matlab-Quellcode 113]
[Pfadplanung] Multicenter-VRP-Lösung basierend auf Matalb genetischer Algorithmus [Enthält Matlab-Quellcode 114]
[Pfadplanung] Matlab simuliertes Tempern zur Lösung des VRP-Problems [Enthält Matlab-Quellcode 115]
[Pfadplanung] Matlab Eine sternbasierte Rasterpfadplanung [Enthält Matlab-Quellcode 116]
[Pfadplanung] Basierend auf Matlab Eine bidirektionale Optimierung der Partikelschwarmgitterkarte mit Kreuzfaktoren [einschließlich Matlab-Quellcode 117]
[TSP] Basierend auf dem Matlab-Ameisenkolonie-Algorithmus zur Lösung des TSP-Problems eines reisenden Verkäufers mit GUI [einschließlich Matlab-Quellcode 118]
[Pfad Planung] basiert auf Matlab Ant Colony Algorithmus Grid Map Pfadplanung [einschließlich Matlab Quellcode 119]
[T.SP-Problem] TSP-Problem basierend auf Matlab Differential Evolution [einschließlich Matlab-Quellcode 131]
[Pfadplanung] Matlab-genetischer Algorithmus-basierter TSP-Problem für reisende Verkäufer [einschließlich Matlab-Quellcode 135]
[Pfadplanung] Matlab-simulierter Annealing-Algorithmus basierend auf TSP-Problem für reisende Verkäufer [einschließlich Matlab-Quellcode 136 Zeitraum]
[Pfadplanung] Intelligente Fahrzeugpfadplanung basierend auf dem Matlab Ant Colony-Algorithmus [einschließlich Matlab-Quellcode 137 Zeitraum]
[Pfadplanung] Huawei Cup: Optimale Verwendung von UAVs in der Katastrophenhilfe [einschließlich Matlab-Quellcode 138 Zeitraum]
[Pfadplanung] basierend auf Matlab RRT dreidimensionale
Pfadplanung [einschließlich Matlab-Quellcode 151] [Pfadplanung] basierend auf Matalb-Feldplanung für künstliche Potentialfelder UAV-Bildung [einschließlich Matlab 155-Zeitraum]
[VRP-Problem] basierend auf Matlab-Speicherung Algorithmus Lösen des TWVRP-Problems [einschließlich Matlab-Quellcode 156]
[VRP-Problem] Matlab-Speicheralgorithmus zur Lösung des CVRP-Problems [einschließlich Matlab-Quellcode 157]
[VRP-Problem] Matlab-Tabu-Suchalgorithmus zur Lösung des VRP-Problems [einschließlich Matlab-Quellcode 158]
[VRP Problem】 Lösen Sie das CVRP-Problem basierend auf dem simulierten Matlab-Tempern [einschließlich Matlab-Quellcode 159]
[VRP-Problem] Lösen Sie das VRP-Problem mit einem Zeitfenster basierend auf der Matlab-Schule für künstliche Fische [einschließlich Matlab-Quellcode 161]
[VRP-Problem] Lösen Sie das Problem mit kapazitätsbasiertem zum genetischen Matlab-Algorithmus VRP-Problem [einschließlich Matlab-Quellcode 162]
[Pfadplanung] 3D-Pfadplanung basierend auf dem Matlab-Wolfsrudel-Algorithmus [einschließlich Matlab-Quellcode 167]
[Pfadplanung] Matlab-Feldpotential-basierte UAV-3D-Pfadplanung [einschließlich Matlab Quellcode 168 Zeitraum】
[Pfadplanung] Dreidimensionale Multi-UAV-koordinierte Trajektorienplanung basierend auf verbesserten Unterschieden in Matlab [einschließlich Matlab-Quellcode 169]
[Pfadplanung] Matlab-künstliche Bienenkolonie-basierte Multi-UAV-dreidimensionale Pfadplanung [einschließlich Matlab-Quellcode 170 ]
[Pfadplanung] 3D-Pfadplanung für UAVs basierend auf dem Matlab Sparrow-Suchalgorithmus [einschließlich Matlab-Quellcode 171]
[Pfadplanung] 3D-Pfadplanung basierend auf dem Matlab Ant Colony-Algorithmus [einschließlich Matlab-Quellcode 179]
[Pfadplanung] Matlab-Immunalgorithmus Die kürzeste Pfadplanung [einschließlich Matlab-Quellcode 194]