前言
前面的博客描述了如何读写flash,可能还对读写flash思路还是不是那么的清晰,首先我们用的是外置的flash,就要模拟跟外部硬件通讯的时序,这样外部硬件才能识别主控侧发出的信号是什么!
SPI是全双工,同步的时钟总线!
目的
通过SPI的方式,实现对外部flash(W25Q128)的读与写,写入的内容读出后在TFTLCD上显示出来。SPI方式可以控制FLASH,EEPROM,虽然前面的博客时使用IIC来控制EEPROM(24c02),其实是一个结果,用不同的方式实现功能。
原理
我们来简单看一下内部的构造图:
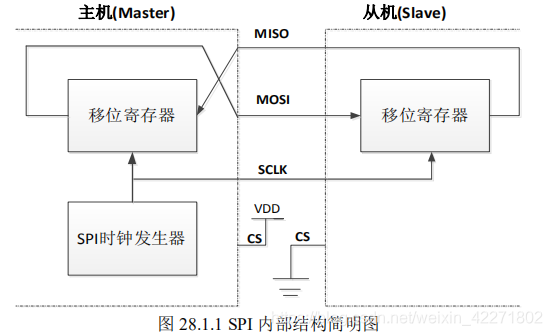
从内部简明图可以看出,主机smart和从机slave都有一个串行移位寄存器,主机通过向他的SPI串行移位寄存器写入数据进行发起数据传输,此寄存器通过MOSI将数据(1BYTE)传输给从机,此时,从机通过自己的移位寄存器将其中的内容(1BYTE)移出来发送给主机,这样就实现了,两个移位寄存器中内容的交换。
所以外设的写操作和读操作是也就是这样被完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
SPI 接口一般使用 4 条线通信:
MISO 主设备数据输入,从设备数据输出。
MOSI 主设备数据输出,从设备数据输入。
SCLK 时钟信号,由主设备产生。
CS 从设备片选信号,由主设备控制。
通信时钟极性与相位
SPI 总线四线工作方式 SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。SPI 主模块和与之通信的外设备时钟相位和极性应该一致。
对比
和IIC对比,两者都是相似的配置方式
不同点:
IIC:需要模拟真实的硬件时序,数据接收,数据发送的每一个时序需要自己从底层函数构造起来
SPI:不需要构造最基础的单个字节数据发送与接收函数,可以直接调用库函数
相同点:
初始化结束,构造出能够发送与接受(单个字节)函数,作为调用的接口,在构造能够写入指定的地址,数据,长度等等,都是通过发送和接收函数完成的。
从IIC读写24c02(eeprom)到SPI读写falsh(w25q128),都是先构造使用此方式实现器件的读写基础函数,适用于大多数使用此原理进行通信的外部硬件,再根据具体的外部硬件属性,构造出来真正可以与外部器件通信的函数,如果读者没有发现,就需要大家自己要对自己的代码进行总结,为何要分模块编写我们的器件?
硬件连接
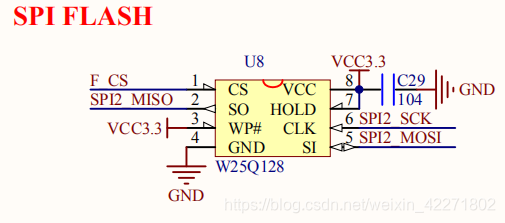
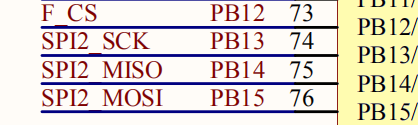
PB12控制flash的片选,PB13控制时钟频率,MISO控制数据接收,MOSI控制数据的输出。所以13,114,15可以配置为推挽输出,且是复用的,12设置成一般的推挽输出就可以。
基础函数
1.使用SPI方式操作外部器件的初始化
1).GPIO初始化函数:
void spi_init(void)
{
GPIO_InitTypeDef GPIO_Initstructure;
SPI_InitTypeDef SPI_Initstructure;
RCC_APB1PeriphClockCmd( RCC_APB1Periph_SPI2, ENABLE );
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_Initstructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Initstructure.GPIO_Pin=GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15;
GPIO_Initstructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstructure);
GPIO_SetBits(GPIOB,GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15);
SPI_Initstructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_256;
SPI_Initstructure.SPI_CPHA=SPI_CPHA_2Edge;
SPI_Initstructure.SPI_CPOL=SPI_CPOL_High;
SPI_Initstructure.SPI_CRCPolynomial=
SPI_Initstructure.SPI_DataSize=7;
SPI_Initstructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex;
SPI_Initstructure.SPI_FirstBit=SPI_FirstBit_MSB;
SPI_Initstructure.SPI_Mode=SPI_Mode_Master;
SPI_Initstructure.SPI_NSS=SPI_NSS_Soft;
SPI_Init(SPI2, &SPI_Initstructure);
SPI_Cmd(SPI2, ENABLE);
write_read(0xff);
}
观察仔细的可能已经发现,上面GPIO初始化少了PB12,为什么这里初始化上呢?因为这个IO口控制两个外设,我们的 F_CS 是连接在 PB12 上面的,W25Q128 和 NRF24L01 共 用 SPI2,所以这两个器件在使用的时候,必须分时复用(通过片选控制)才行。我们的这个IO口的初始化就放在具体操作的外设初始化内。
2).对flash的读写1BYTE函数
uint8_t write_read(uint8_t TXDATA)
{
uint8_t i;
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_TXE) == RESET)
{
i++;
if(i>200)return 0;
}
SPI_I2S_SendData(SPI2, TXDATA);
i=0;
while(SPI_I2S_GetFlagStatus(SPI2, SPI_I2S_FLAG_RXNE) == RESET)
{
i++;
if(i>200)return 0;
}
return SPI_I2S_ReceiveData(SPI2) ;
}
根据寄存器标志位判断移位寄存器的状态,参数是要写入的值,return是读到的值,SPI_I2S_SendData(SPI2, TXDATA);和SPI_I2S_ReceiveData(SPI2) ;都是库函数可以调用的,不需要像IIC那样构造时许函数!
3).SPI速度设置
根据预分频值,通过你位操作实现对SPI速率的设置
void SPI2_SetSpeed(uint8_t SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));
SPI2->CR1&=0XFFC7;
SPI2->CR1|=SPI_BaudRatePrescaler;
SPI_Cmd(SPI2,ENABLE);
}
2.基于SPI基础函数,搭建属于W25Q128器件的基础通信函数
1)GPIO初始化函数
void W25Q128_init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
W25QX_CS=1;
spi_init();//引用SPI初始化函数
SPI2_SetSpeed(SPI_BaudRatePrescaler_2);//SPI速率函数调用
version=read_IC_ID();//版本读写函数
}
2)都状态寄存器值函数
我们读出来的是一个八位的二进制数据,如下对应,
//BIT 7 6 5 4 3 2 1 0
SPR RV TB BP2 BP1 BP0 WEL BUSY
状态保护位 TB,BP2,BP1,BP0:FLASH的区域写保护设置,WEL写使能锁定,BUSY忙标记位
uint8_t read_rs(void)
{
uint8_t status;
W25QX_CS=0;
write_read(0x05);
status=write_read(0xff);
W25QX_CS=1;
return status;
}
3)写(修改)状态寄存器值函数
注意:此函数0,1,6位不可修改
void write_rs(uint8_t data)
{
W25QX_CS=0;
write_read(0x01);
write_read(data);
W25QX_CS=1;
}
4)写使能函数
操作WEL位,将其置位
void write_en(void)
{
W25QX_CS=0;
write_read(0x06);
W25QX_CS=1;
}
5)发送禁止写数据命令
也是操作WEL位,将其清零
void write_disEN(void)
{
W25QX_CS=0;
write_read(0x04);
W25QX_CS=1;
}
6)发送读取器件ID命令
uint16_t read_IC_ID(void)
{
uint16_t temp=0;
W25QX_CS=0;
write_read(0x90);
write_read(0x00);
write_read(0x00);
write_read(0x00);
temp|=write_read(0xff)<<8;
temp|=write_read(0xff);
W25QX_CS=1;
return temp;
}
7)从指定地址,读取指定长度的数据
void read_len_data(uint32_t addr,uint16_t len,uint8_t *buff)
{
uint16_t i;
W25QX_CS=0;
write_read(0x03);
write_read((addr>>16)&0xff);
write_read((addr>>8)&0xff);
write_read(addr&0xff);
for(i=0;i<len;i++)
{
*(buff+i)=write_read(0xff);
}
W25QX_CS=1;
}
8)等待BUSY位清空(不忙)
void wait_write_end(void)
{
while((read_rs()&0x01)==0x01);
}
9)写一页(小于256字节)数据函数
void write_len_page(uint32_t addr,uint16_t len,uint8_t *data)
{
uint16_t i;
write_en();
W25QX_CS=0;
write_read(0x02);//·¢ËÍдҳµØÖ·ÃüÁî
write_read((addr>>16)&0xff);
write_read((addr>>8)&0xff);
write_read(addr&0xff);
for(i=0;i<len;i++)
write_read(*(data+i));
W25QX_CS=1;
wait_write_end();
}
10)擦除一个扇区(此flash的datasheet一扇区为4K),也是最小擦除单位
void erase_sector(uint32_t addr)
{
addr*=4096;
write_en();
wait_write_end();
W25QX_CS=0;
write_read(0x20);
write_read((addr>>16)&0xff);
write_read((addr>>8)&0xff);
write_read(addr&0xff);
W25QX_CS=1;
wait_write_end();
}
11)擦除整个falsh芯片
void erase_whole_sector(void)
{
write_en();
wait_write_end();
W25QX_CS=0;
write_read(0xC7);
W25QX_CS=1;
wait_write_end();
}
12)要写入数据的区域都是0xff条件下,写入小于65535个字节函数
void write_len_nocheck(uint32_t addr,uint16_t len,uint8_t *data)
{
uint16_t surplus;
surplus=256-len%256;
if(surplus>=len)surplus=len;
while(1)
{
write_len_page(addr,surplus,data);
if(surplus==len)
break;
else
{
addr+=surplus;
len-=surplus;
data+=surplus;
if(len<=256)
{
surplus=len;
}
else
surplus=256;
}
}
}
13)在写入数据前,不管是否有擦除要写入数据的flash的基础函数,再写入的过程中要判断是否是可写入的
void write_len_check(uint32_t addr,uint16_t len,uint8_t *data)
{
uint32_t sector;
uint16_t pag;
uint8_t *buf;
uint16_t purplu;
uint16_t number;
uint16_t i;
sector=addr/4096;
pag=addr%4096;
purplu=4096-pag;
buf=buff;
if(purplu>=len)
{
purplu=len;
}
while(1)
{
read_len_data(sector*4096,4096,buf);
for(number=0;number<purplu;number++)
{
if(buf[pag+number]!=0xff)
break;
}
if(number<purplu)
{
erase_sector(sector);
for(i=0;i<purplu;i++)
{
buf[pag+i]=*(data+i);
}
write_len_nocheck(sector*4096,4096,buf);
}
else
{
write_len_nocheck(addr,purplu,data);
}
if(len==purplu)
break;
else
{
sector++;
pag=0;
len-=purplu;
addr+=purplu;
data+=purplu;
if(len<=4096)purplu=len;
else
purplu=4096;
}
}
}
此是stm32开发板测falsh是16MB,分为256块,每块大小为64K,每块分为16扇区,每个扇区4K,每个扇区又分为16页,每页为256字节,这也就是上面的函数为什么写入超过256字节时要经过处理
主函数mian
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "lcd.h"
#include "usart.h"
#include "W25Q128.h"
const u8 TEXT_Buffer[]={" STM32 SPI TEST"};
#define SIZE sizeof(TEXT_Buffer)
extern uint8_t buff[4096];
int main(void)
{
uint8_t x=0;
uint8_t key;
uint8_t datatemp[SIZE];
uint32_t FLASH_SIZE;
delay_init();
uart_init(115200);
LED_Init();
LCD_Init();
KEY_Init();
W25Q128_init();
while(read_IC_ID()!=0xEF17)
{
LCD_ShowString(30,150,200,16,16,"W25Q128 Check Failed!");
delay_ms(500);
LCD_ShowString(30,150,200,16,16,"Please Check! ");
delay_ms(500);
LED0=!LED0;
}
while(1)
{
key=KEY_Scan(0);
if(key==KEY1_PRES)
{
LCD_Fill(0,170,239,319,WHITE);
LCD_ShowString(30,170,200,16,16,"Start Write W25Q128....");
write_len_check(FLASH_SIZE-100,SIZE,(u8*)TEXT_Buffer);
LCD_ShowString(30,170,200,16,16,"W25Q128 Write Finished!");
}
if(key==KEY0_PRES)
{
LCD_ShowString(30,170,200,16,16,"Start Read W25Q128.... ");
read_len_data(FLASH_SIZE-100,SIZE,datatemp);
LCD_ShowString(30,170,200,16,16,"The Data Readed Is: ");
LCD_ShowString(30,190,200,16,16,datatemp);
}
}
}
实验现象
通过先按KEY1 按键写入数据,然后按 KEY0 读取数据,显示屏上显示结果,写入的数据可以自行修改!
流程总结
先获得首地址(WriteAddr)所在的扇区,并计算在扇区内
的偏移,然后判断要写入的数据长度是否超过本扇区所剩下的长度,如果不超过,再先看看是否要擦除,如果不要,则直接写入数据即可,如果要则读出整个扇区,在偏移处开始写入指定长度的数据,然后擦除这个扇区,再一次性写入。当所需要写入的数据长度超过一个扇区的长度的时候,我们先按照前面的步骤把扇区剩余部分写完,再在新扇区内执行同样的操作,如此循环,直到写入结束。
从代码可以看出,我们在SPI函数的基础之上,是以256字节的单位(页)大小区域上进行写操作的(读操作比较简单就不陈述),超过256的我们需要构造函数,使得地址加256,继续进行写操作,如果写的数据超过了一个扇区(4K),需要对超过扇区的地址数据进行累加,利用扇区偏移,来操作扇区级别的数据写入!这两个数据处理关键点需要我们抓住,这样就能构造出在64M(1块)内进行数据的连续写操作。
其他
通过按键控制数据的写入与读出,TFTLCD显示结果,调用前面我的博客的头文件及初始化函数即可,
基础的函数当然还有,都是一个原理,器件的参数,属性都需要参照器件的datasheet,虽然有些许器件原理和大小都是相同的,也不排除例外,还是建议去参照数据手册收再编写程序
