前言
1.Retinex图像增强是一种高动态范围图像的新色调映射技术。而基础理论是,物体的颜色是由物体对长波(红色)、中波(绿色)、短波(蓝色)光线的反射能力来决定的,而不是由反射光强度的绝对值来决定的,物体的色彩不受光照非均匀性的影响,具有一致性,即retinex是以色感一致性(颜色恒常性)为基础的。不同于传统的线性、非线性的只能增强图像某一类特征的方法,Retinex可以在动态范围压缩、边缘增强和颜色恒常三个方面达到平衡,因此可以对各种不同类型的图像进行自适应的增强。
2.Retinex图像增强包括两个步骤,全局适应和人类视觉系统的局部自适应。在局部自适应过程中,这里使用引导滤波器代替原本的高斯滤波器以减少晕圈伪影。为了保证良好的再现和动态范围压缩,使用基于场景的亮度值的对比度增强因子。此外,引入自适应非线性偏移来处理对数函数的非线性强度。
3.导向滤波作为一种保边滤波,可以运用在很多场合,比如美颜,去雾。
代码实现
void ALTMRetinex(const Mat& src, Mat &dst, bool LocalAdaptation = false, bool ContrastCorrect = true)
{
Mat temp, src_gray;
src.convertTo(temp, CV_32FC3);
//灰度图
cvtColor(temp, src_gray, CV_BGR2GRAY);
double LwMax;
//得到最大值
minMaxLoc(src_gray, NULL, &LwMax);
Mat Lw_;
const int num = src.rows * src.cols;
//计算每个数组元素绝对值的自然对数
cv::log(src_gray + 1e-3f, Lw_);
//矩阵自然指数
float LwAver = exp(cv::sum(Lw_)[0] / num);
Mat Lg;
log(src_gray / LwAver + 1.f, Lg);
//矩阵除法
cv::divide(Lg, log(LwMax / LwAver + 1.f), Lg);
//局部自适应
Mat Lout;
if (LocalAdaptation)
{
int kernelSize = floor(std::max(3, std::max(src.rows / 100, src.cols / 100)));
Mat Lp, kernel = cv::getStructuringElement(MORPH_RECT, Size(kernelSize, kernelSize));
cv::dilate(Lg, Lp, kernel);
Mat Hg = guidedFilter(Lg, Lp, 10, 0.01f);
double eta = 36;
double LgMax;
cv::minMaxLoc(Lg, NULL, &LgMax);
Mat alpha = 1.0f + Lg * (eta / LgMax);
Mat Lg_;
cv::log(Lg + 1e-3f, Lg_);
float LgAver = exp(cv::sum(Lg_)[0] / num);
float lambda = 10;
float beta = lambda * LgAver;
cv::log(Lg / Hg + beta, Lout);
cv::multiply(alpha, Lout, Lout);
cv::normalize(Lout, Lout, 0, 255, NORM_MINMAX);
}
else
{
cv::normalize(Lg, Lout, 0, 255, NORM_MINMAX);
}
Mat gain(src.rows , src.cols, CV_32F);
for (int i = 0; i < src.rows; i++)
{
for (int j = 0; j < src.cols; j++)
{
float x = src_gray.at<float>(i, j);
float y = Lout.at<float>(i, j);
if (0 == x) gain.at<float>(i, j) = y;
else gain.at<float>(i, j) = y / x;
}
}
Mat bgr[3];
cv::split(temp, bgr);
if (ContrastCorrect)
{
// 校正图像对比度
bgr[0] = (gain.mul(bgr[0] + src_gray) + bgr[0] - src_gray) *0.5f;
bgr[1] = (gain.mul(bgr[1] + src_gray) + bgr[1] - src_gray) *0.5f;
bgr[2] = (gain.mul(bgr[2] + src_gray) + bgr[2] - src_gray) *0.5f;
}
else
{
cv::multiply(bgr[0], gain, bgr[0]);
cv::multiply(bgr[1], gain, bgr[1]);
cv::multiply(bgr[2], gain, bgr[2]);
}
cv::merge(bgr, 3, dst);
dst.convertTo(dst, CV_8UC3);
}
//导向滤波器
Mat guidedFilter(cv::Mat& I, cv::Mat& p, int r, float eps)
{
/*
× GUIDEDFILTER O(N) time implementation of guided filter.
×
× - guidance image: I (should be a gray-scale/single channel image)
× - filtering input image: p (should be a gray-scale/single channel image)
× - local window radius: r
× - regularization parameter: eps
*/
cv::Mat _I;
I.convertTo(_I, CV_32FC1);
I = _I;
cv::Mat _p;
p.convertTo(_p, CV_32FC1);
p = _p;
//因为opencv自带的boxFilter()中的Size,比如9x9,我们说半径为4
r = 2 * r + 1;
//mean_I = boxfilter(I, r) ./ N;
cv::Mat mean_I;
cv::boxFilter(I, mean_I, CV_32FC1, cv::Size(r, r));
//mean_p = boxfilter(p, r) ./ N;
cv::Mat mean_p;
cv::boxFilter(p, mean_p, CV_32FC1, cv::Size(r, r));
//mean_Ip = boxfilter(I.*p, r) ./ N;
cv::Mat mean_Ip;
cv::boxFilter(I.mul(p), mean_Ip, CV_32FC1, cv::Size(r, r));
//cov_Ip = mean_Ip - mean_I .* mean_p; % this is the covariance of (I, p) in each local patch.
cv::Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);
//mean_II = boxfilter(I.*I, r) ./ N;
cv::Mat mean_II;
cv::boxFilter(I.mul(I), mean_II, CV_32FC1, cv::Size(r, r));
//var_I = mean_II - mean_I .* mean_I;
cv::Mat var_I = mean_II - mean_I.mul(mean_I);
//a = cov_Ip ./ (var_I + eps); % Eqn. (5) in the paper;
cv::Mat a = cov_Ip / (var_I + eps);
//b = mean_p - a .* mean_I; % Eqn. (6) in the paper;
cv::Mat b = mean_p - a.mul(mean_I);
//mean_a = boxfilter(a, r) ./ N;
cv::Mat mean_a;
cv::boxFilter(a, mean_a, CV_32FC1, cv::Size(r, r));
//mean_b = boxfilter(b, r) ./ N;
cv::Mat mean_b;
cv::boxFilter(b, mean_b, CV_32FC1, cv::Size(r, r));
//q = mean_a .* I + mean_b; % Eqn. (8) in the paper;
cv::Mat q = mean_a.mul(I) + mean_b;
return q;
}
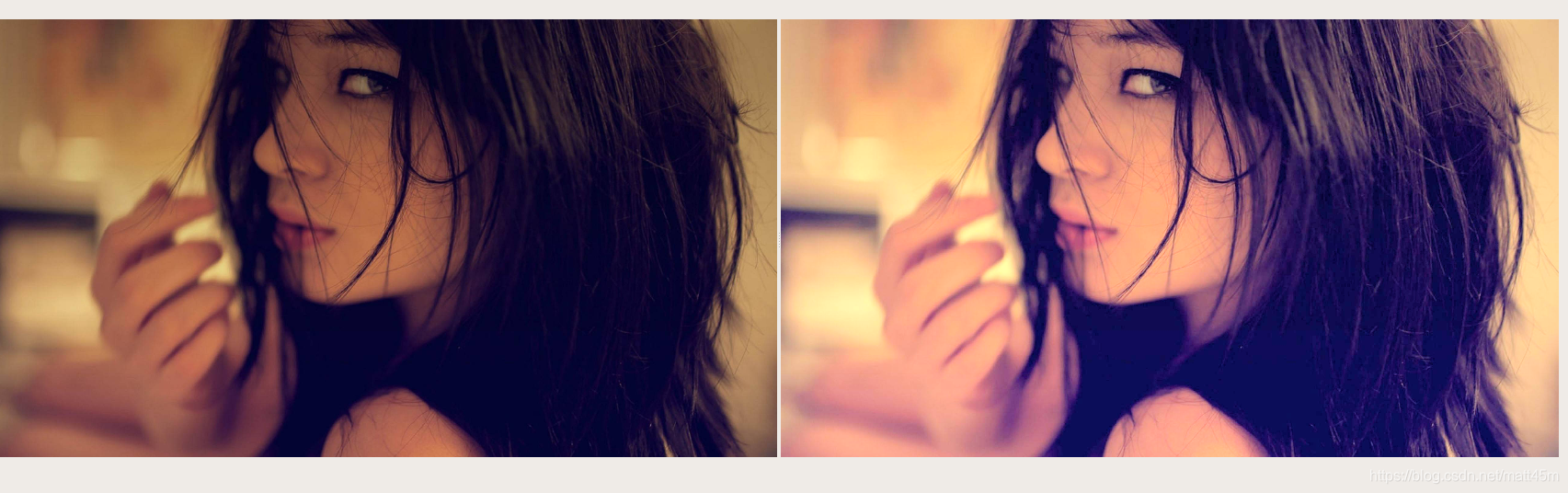
运行结果

结语
我这里使用的库OpenCV版本是3.30,关于opencv学习,有兴趣的看我之前发的博客,可以加之前博客后面给的兴趣群。
