转自:Nature自然科研,原文链接:https://mp.weixin.qq.com/s/4UOrC4YGxG4-ue0QcAEgfA
《自然》近日发表的一篇论文Particle robotics based on statistical mechanics of loosely coupled components描述了一种能模拟生物细胞集体迁移的机器人。研究为开发具有预先确定性行为的大规模机器人系统提供了一种替代方法,这类系统或比一些现有仿生系统具有更高的可扩展性和鲁棒性。

经过设计的模块化或群机器人系统可以模拟生物学行为,如自组装、修复和搬运,但大部分系统需要集中控制或具有会限制系统能力和可扩展性的复杂设计。
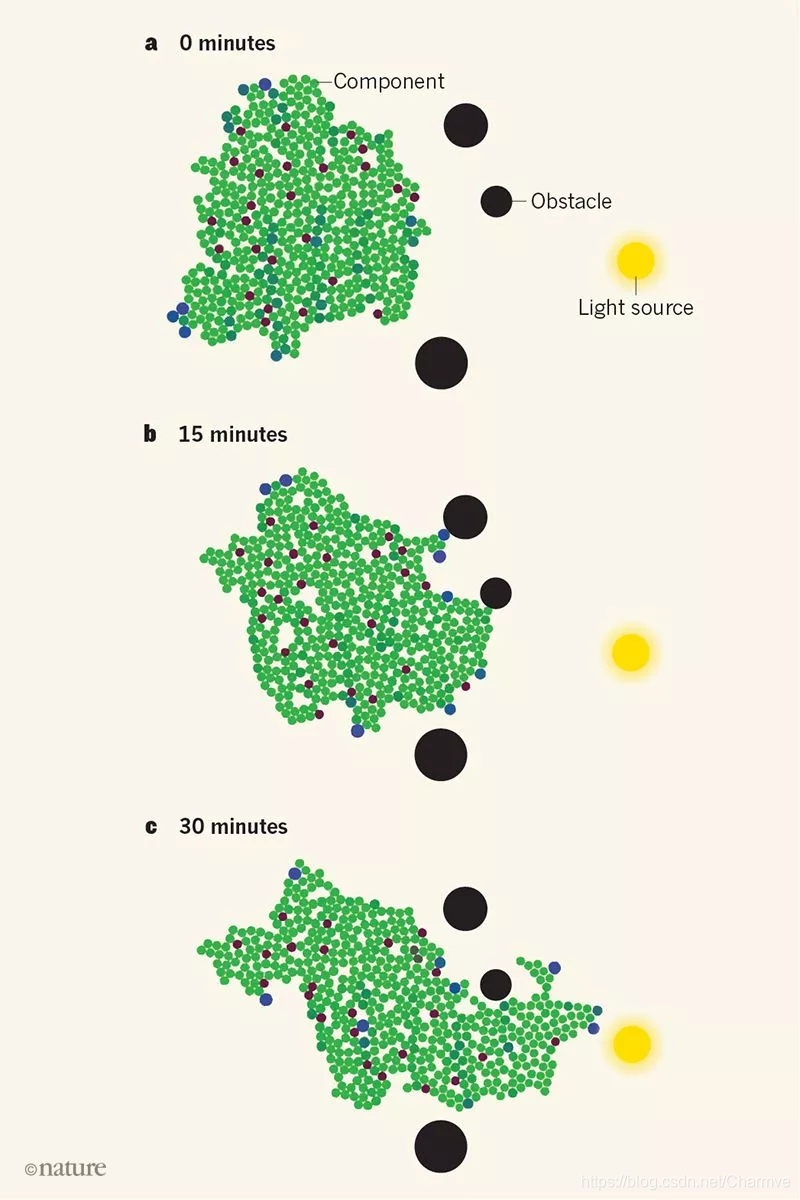
美国哥伦比亚大学的Hod Lipson和同事设计的一款极简系统可以减少这些限制。这种机器人由简单的盘状“粒子”组成,相比复杂的机器人,作者认为这些机器人的制造更简单,也易于形成规模。单个机器人粒子无法移动,只能像相机光圈那样伸缩;但是松散聚集在一起后,程序能让它们对单梯度信号(如光线)作出响应,并按照偏移模式振荡,集体朝着刺激源移动。
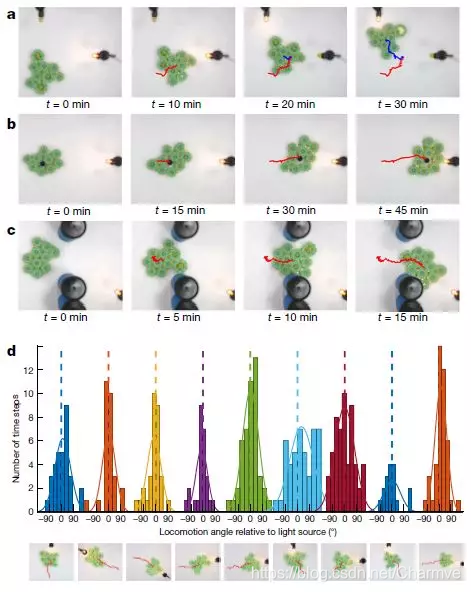
作者用25个物理机器人粒子展示了移动、物体搬运以及向光刺激移动的行为,并用10万个粒子的模拟实验表明了该系统可扩展性。此外,该系统还能搬运“失效粒子”——模拟预测,在20%粒子失效的情况下,系统仍能继续运动。在传统机器人系统中,单个个体的缺失有时会导致整个系统失效,而作者认为他们的机器人具有传统机器人系统所没有的可扩展控制和鲁棒性。
ⓝ
Nature|doi:10.1038/s41586-019-1022-9

关注微信公众号:迈微电子研发社,获取更多精彩内容,首发于个人公众号。

知识星球 (付费群) :社群旨在分享秋招/春招准备攻略(含刷题)、面经和内推机会、学习路线、知识题库等。


