光线从物体反射到摄像机的图像采集器过程中光路的几何研究
针孔成像模型
首先引入一个简单的模型解释——针孔摄像机模型,利用小孔成像原理。
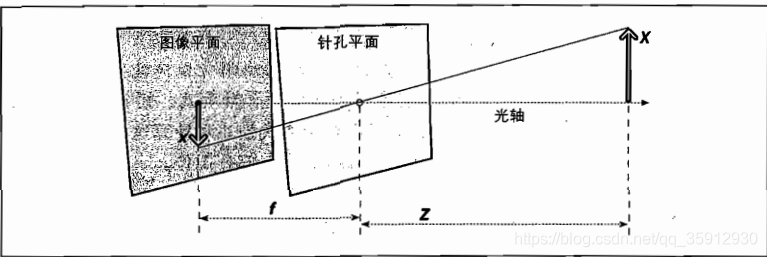
-f(焦距):从针孔到屏幕的距离,单位是像素。
-Z:物体到摄像机的距离。
-X:物体的实际长度。
-x:图像(投影)平面的物体长度,单位是像素。
由三角形相似可知:-x/f = X/Z
为了投影平面的图像不倒立,把投影平面前移至投影中心前f远处
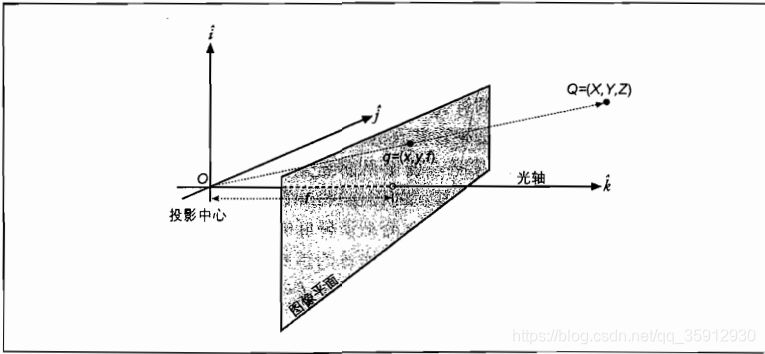
-投影中心:针孔点
-主点:光轴与图像平面的交点
空间某点Q
依旧符合三角形相似,有x/f = X/Z。
但由于安装的误差,摄像机的图像采集器通常不在光轴上,因此我们引入cx, cy对偏移补偿,同时由于部分不良的图像采集器的像素单元为长方形而非正方形,如下图:
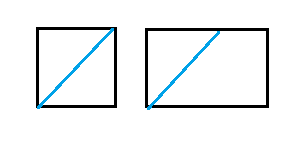
而投影的图像是不会变的,这样就会导致在以像素为单位的图像平面中,横纵坐标比例与空间坐标中的原图像不符,即两图像不相似。
为此我们以某种方式对像素单元的长宽以mm进行测量得到,在x方向上一个像素值对应sxmm,在y方向上一个像素值对应symm。这样,尽管得到的像素值坐标不标准,仍能通过乘上sx或sy来转换成正确的长度坐标。(s单位:像素/毫米)
为了方便图像处理,依旧采用像素坐标表示投影平面的点,把sx或sy乘给f,从而得到fx,fy,(单位:像素)
对空间中某点Q(X, Y, Z ),有

基本投影几何
投影变换:将坐标Q(X, Y, Z)投射到投影平面上坐标q(x,y)的过程。
透镜畸变
但是由于利用小孔去成像,收集的光线太少,也受一定的距离限制,再引入透镜,与此同时带来了光线折射,即为透镜的畸变,为此利用摄像机的标定来矫正这种畸变(折射),从而回到简单的针孔摄像机模型。
径向畸变
切向畸变
标定
旋转矩阵:
平移向量:
棋盘
