前言:
rviz(ROS visualization):用于机器人、传感器和算法的通用3D可视化系统。rviz能够绘制多种类型的数据流。特别是三维的数据。在ROS中所有类型的数据都被关联到一个参考坐标系上。
1.准备工作:
本文以上一个笔记遥控操作turtlebot为实例基础。准备工作:打开四个终端:一个运行roscore:
roscore一个运行键盘驱动:
rosrun teleopbot key_publisher.py 一个运行keys_to_teleop_with_rate.py:
roslaunch turtlebot_gazebo turtlebot_world.launch还有一个运行roslaunch脚本启动gazebo并模拟一个Turtlebot:
./keys_to_twist_with_ramps.py cmd_vel:=cmd_vel_mux/input/teleop2.打开rviz:
roscorerosrun rviz rviz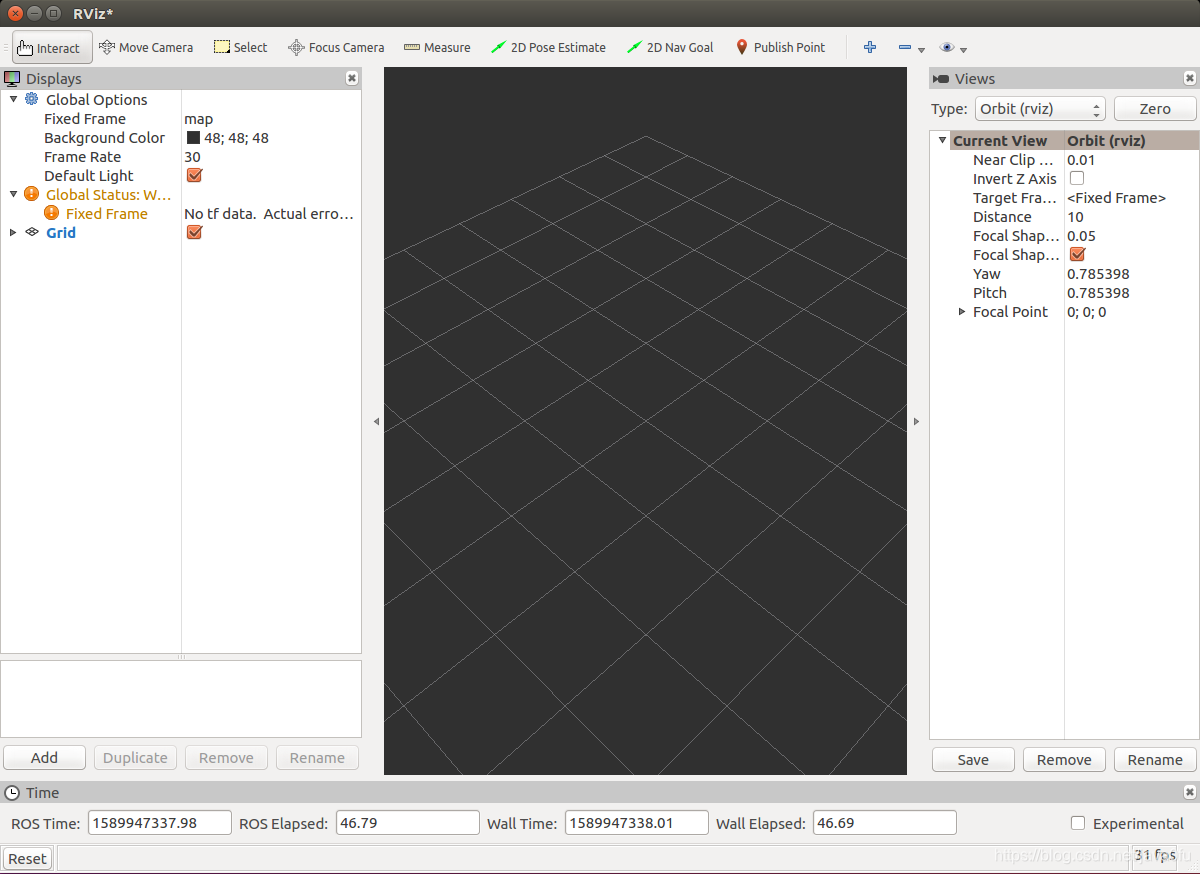
初次打开rviz,界面如上图,rviz的初始状态,任何可视化面板都没有配置,接下来需要简单配置并向rviz中添加不同的流。
2.选择一个参考坐标系:
选择一个关联到Kinect深度相机光心上的参考坐标系。点击rviz左上角面板中Fixed Frame,选择下拉框中camera_depth_frame
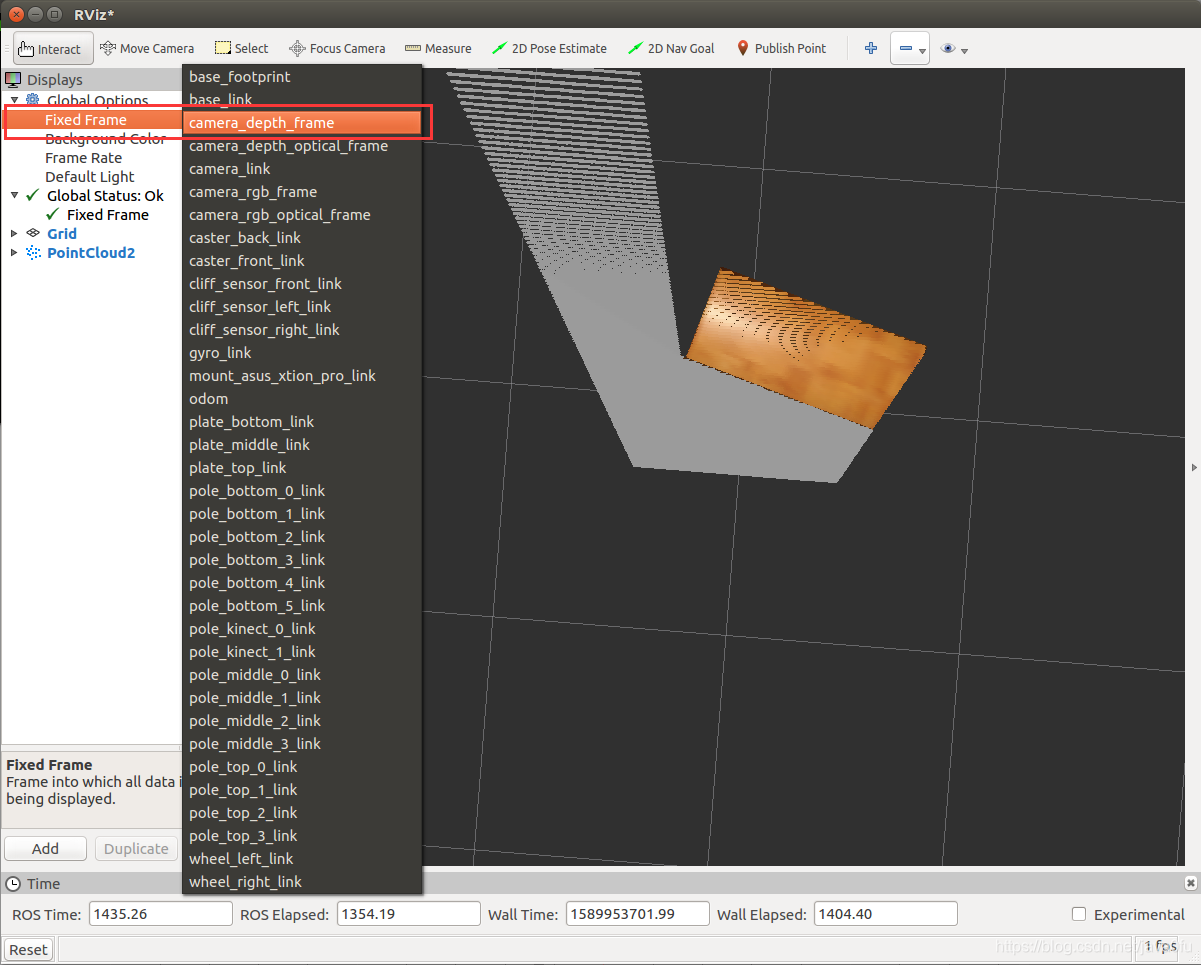
为可视化选择固定坐标系是配置rviz过程中最重要的步骤。
3.插入机器人3D模型
想要看到机器人的3D模型,必须插入一个robotmodel插件的实例,这样可以直观了解机器人的位置以及与周围环境的大小比例。点击rviz左下角add按钮,打开对话框选中RobotModel点击OK,对于RobotModel插件,通常只有一个需要配置的参数就是机器人模型在参数服务器中的名字,这里默认即可。

Robot Description参数即为机器人在参数服务器中的名字,默认即可。

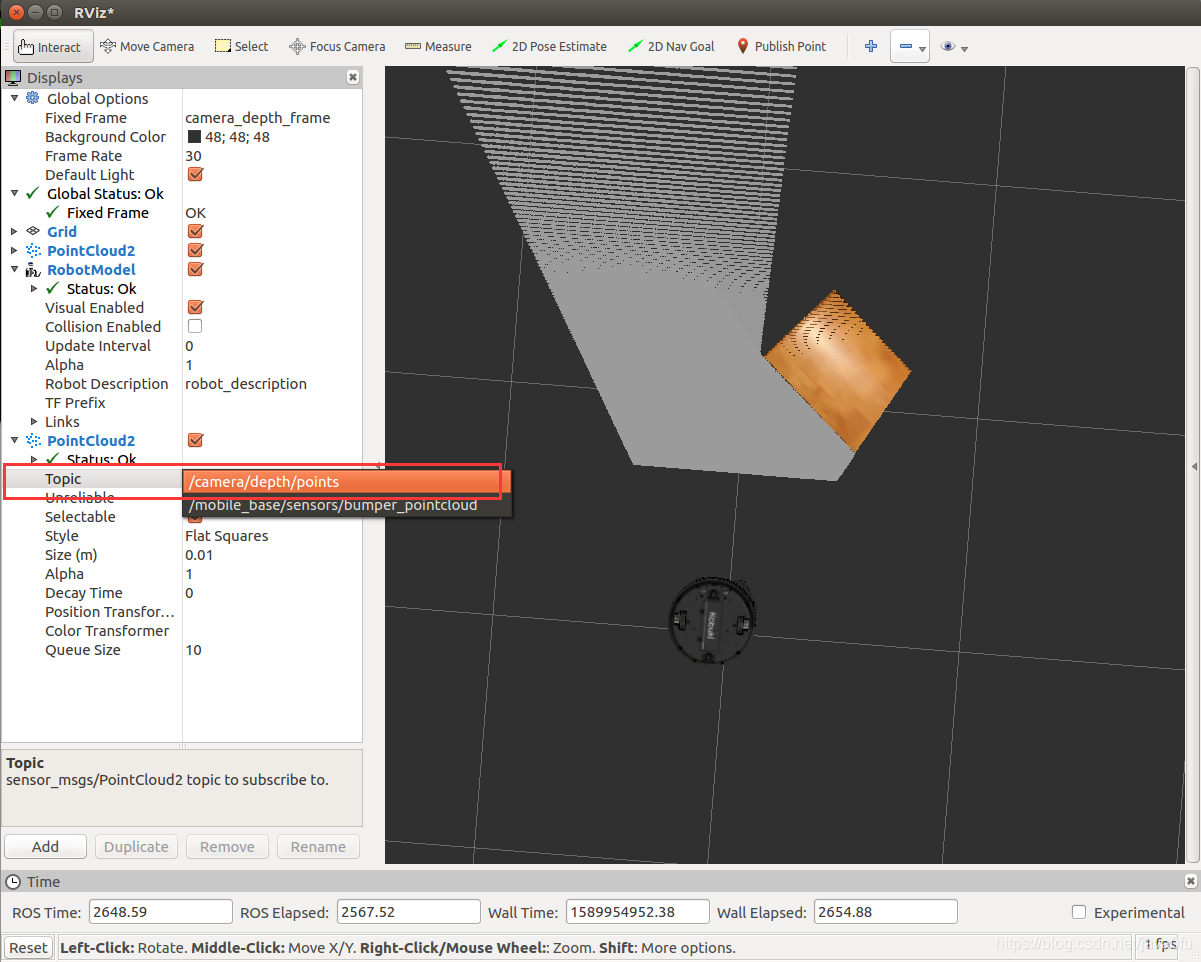
4.绘制深度图像点云数据:
点击add添加PonintCloud2插件

指定接受话题消息:
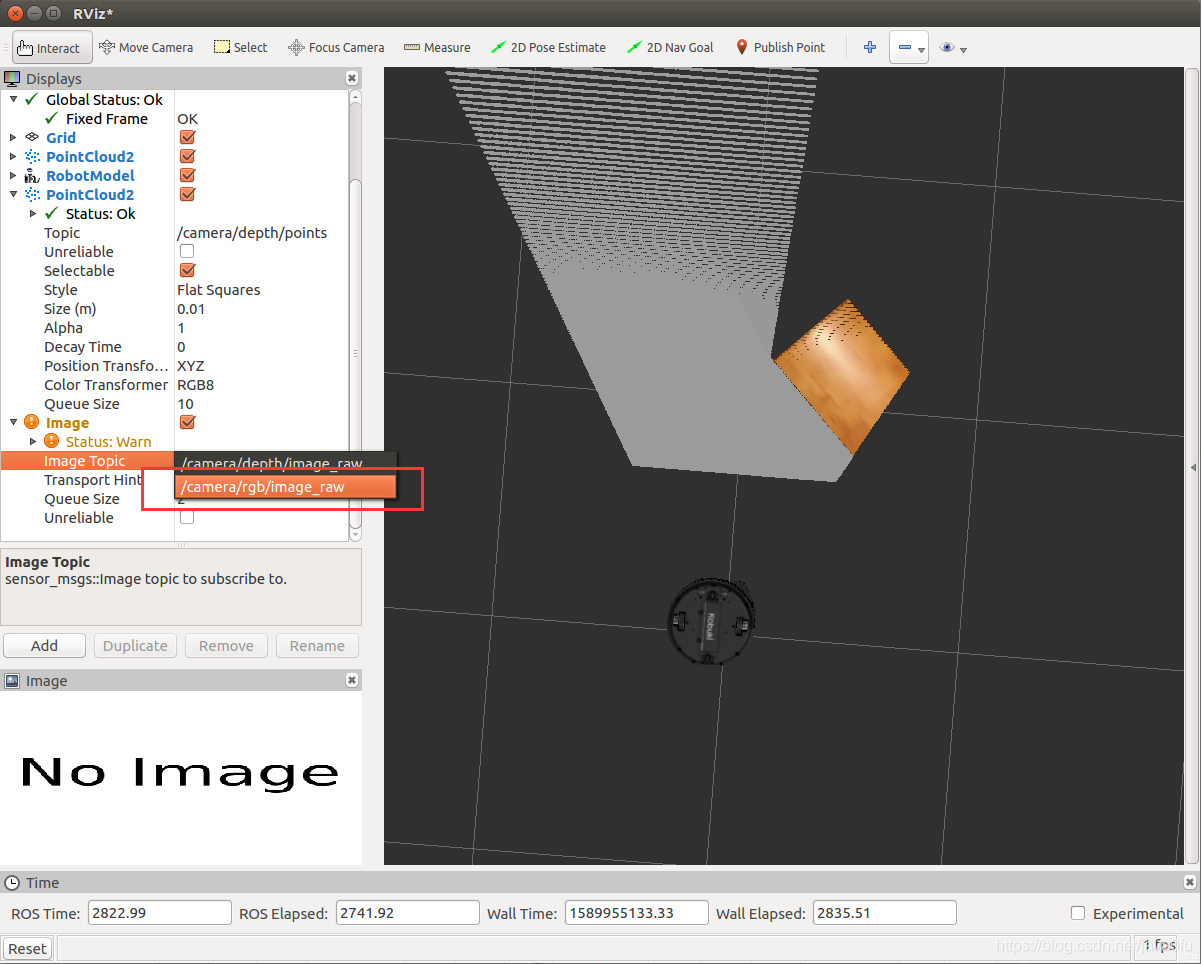
5.绘制彩色图像:
出了深度图像,Turtlebot上的Kinect相机也产生一个彩色图像输出,对于我们遥控,同时显示彩色图像和点云数据是有必要的。添加image插件:

指定接受话题消息:
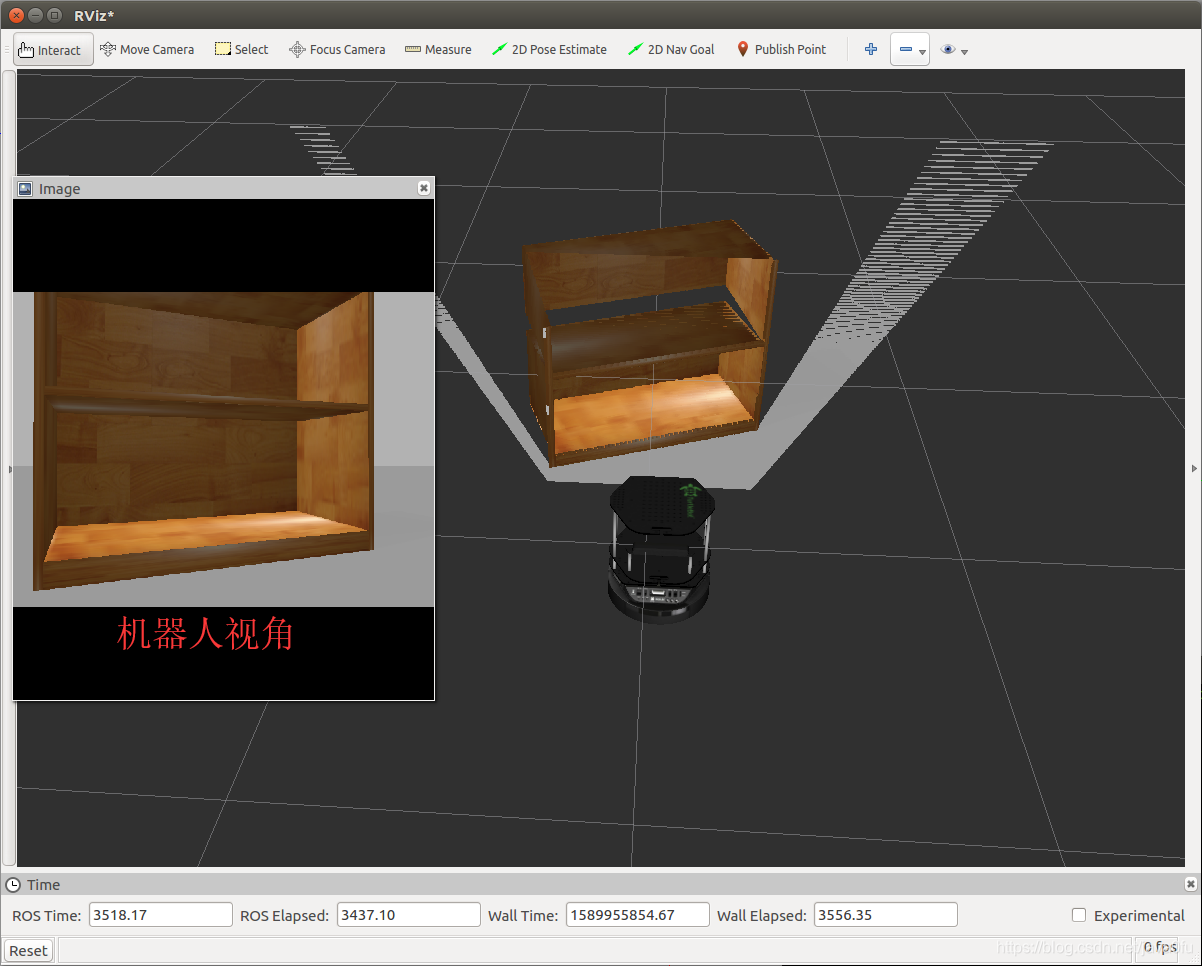
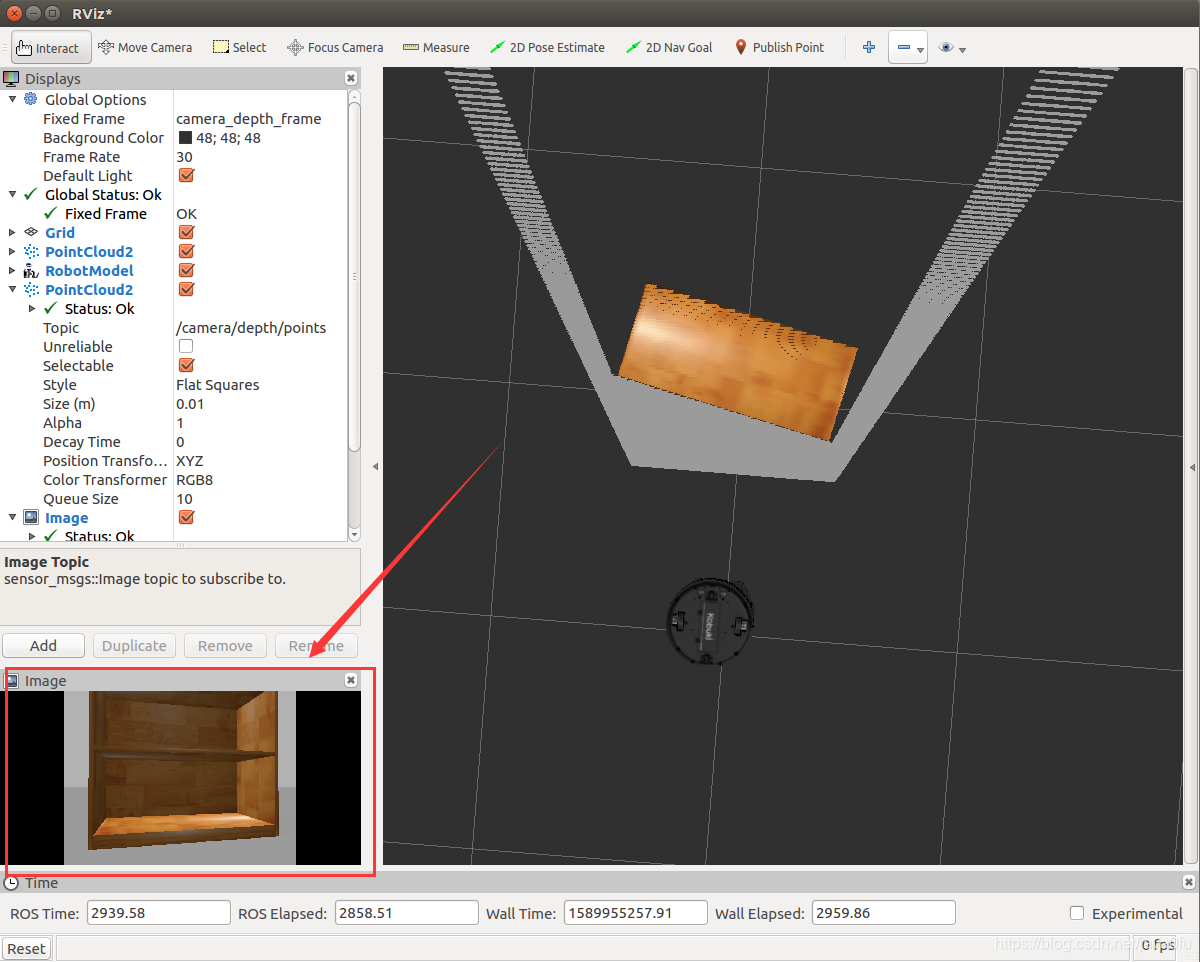
这样,相机所产生的视频流被添加到了界面的左下角,使遥控者同时看到第一视角和第三视角
6.遥控体验:
配置完成后,便可以在键盘驱动终端输入指令控制机器人移动,并且在rviz可视化界面看得到机器人视频流输出,增加遥控体验。

rviz的界面使面板化的,可以根据需要调整Image面板的大小以及位置,如下图: