算法原理
参考链接
PCL 点云特征描述与提取
PFH和FPFH的算法原理
代码实现
#include<iostream>
#include<vector>
#include <pcl/point_types.h>
#include <pcl/features/fpfh.h>
#include <pcl/io/pcd_io.h>//点云文件pcd 读写
#include <pcl/features/normal_3d.h>//法线特征
#include <pcl/visualization/histogram_visualizer.h> //直方图的可视化
#include <pcl/visualization/pcl_plotter.h>// 直方图的可视化 方法2
using namespace std;
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
//======【1】 读取点云文件 填充点云对象======
pcl::PCDReader reader;
reader.read("mesh.pcd", *cloud_ptr);
// =====【2】计算法线========创建法线估计类====================================
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud_ptr);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);//设置近邻搜索算法
// 输出点云 带有法线描述
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals_ptr(new pcl::PointCloud<pcl::Normal>);
pcl::PointCloud<pcl::Normal>& cloud_normals = *cloud_normals_ptr;
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch(0.03);//半价内搜索临近点 3cm
// 计算表面法线特征
ne.compute(cloud_normals);
//=======【3】创建FPFH估计对象fpfh, 并将输入点云数据集cloud和法线normals传递给它=================
pcl::FPFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::FPFHSignature33> fpfh;
//pcl::FPFHEstimationOMP<pcl::PointXYZ,pcl::Normal,pcl::FPFHSignature33> fpfh;//多核加速
fpfh.setInputCloud(cloud_ptr);
fpfh.setInputNormals(cloud_normals_ptr);
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree2(new pcl::search::KdTree<pcl::PointXYZ>());
fpfh.setSearchMethod(tree2);//设置近邻搜索算法
//输出数据集
pcl::PointCloud<pcl::FPFHSignature33>::Ptr fpfh_fe_ptr(new pcl::PointCloud<pcl::FPFHSignature33>());//fphf特征
//使用半径在5厘米范围内的所有邻元素。
//注意:此处使用的半径必须要大于估计表面法线时使用的半径!!!
fpfh.setRadiusSearch(0.05);
//计算pfh特征值
fpfh.compute(*fpfh_fe_ptr);
cout << "phf feature size : " << fpfh_fe_ptr->points.size() << endl;
// 应该与input cloud->points.size ()有相同的大小,即每个点都有一个pfh特征向量
// ========直方图可视化=============================
//定义绘图器
pcl::visualization::PCLPlotter *plotter = new pcl::visualization::PCLPlotter("My Plotter");
//设置特性
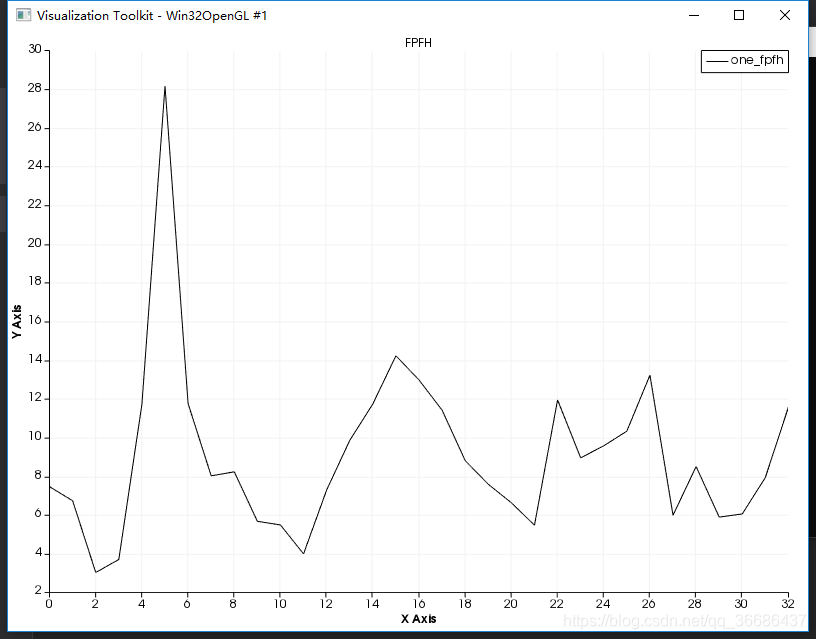
plotter->setTitle("FPFH");
plotter->setShowLegend(true);
cout << pcl::getFieldsList<pcl::FPFHSignature33>(*fpfh_fe_ptr);
plotter->addFeatureHistogram<pcl::FPFHSignature33>(*fpfh_fe_ptr, "fpfh", 5, "one_fpfh");/*第2个参数为点云类型的field name
该参数可通过getFieldsList()返回,并且只限定于注册过的点云类型*/
plotter->setWindowSize(800, 600);
plotter->spinOnce(30000000);
plotter->clearPlots();
//方法2
// pcl::visualization::PCLPlotter plotter;
//plotter.addFeatureHistogram(*fpfh_fe_ptr, 300); //设置的很坐标长度,该值越大,则显示的越细致
//plotter.plot();
return 0;
}
实验结果
更多可视化
请参考《点云库PCL从入门到精通》P129 PCLPlotter