7月3日,5G R16标准冻结,时延降到1毫秒,更关键的是引入了“增强 V2X 支持”,车联网作为5G 最被看好的爆发式增长领域,即将迎来曙光。
0x01、引子——传统集装箱码头的无人驾驶
随着传统集装箱码头自动化项目的开展,走得快的码头已经完成的岸桥和场桥的自动化改造(远控),开始解决数量最多的一类作业设备——平面运输设备——拖车(集卡)的无人化问题。
看过我文章的朋友都清楚,我认为集卡无人驾驶如果只是为了减少对人的依赖,那么在这两年,完全没有必要开展这个项目,无论是政策法规,还是商用解决方案的成熟度,两年内还很难让集卡上的安全员(驾驶员)撤离。那么现在这些在推进无人驾驶项目的公司脑子进水了吗?当然不是,理由当然 有很多,大致可以分成三类派别,大家可以自己对号入座:
1、社会责任感派推进传统码头的无人化浪潮,历史留名,舍我其谁?!
2、怕跟丢派看!他都能搞,我们为什么不能搞?兄弟们,跟上!有困难要上,没有困难制造困难也要上!
3、描绘未来派这是我的使命,也是未来的方向,我要把大家带入未来,让大家看到未来!
我还是保留我的观点,无人化项目,关键是数字化作业流程和动作,对其进行规则化、统一化,消除不确定性,为了提前获得最好的计划。集卡无人驾驶也是一样。所以,最终是集卡无人化之后,上层系统可以准确获知集卡每个动作指令的准确执行时间和当前状态。可以等价转化为一个全都上层控制下层准确、规则执行的系统。这也是为什么我在前一篇文章中羡慕 全自动化码头 AGV 方案的原因。
0x02、你是怎么样的上帝?——混流场景下无人驾驶系统的设计
传统集装箱码头上无人驾驶集卡,如果不改变堆场布局,几乎都会面临无人驾驶集卡和外集卡混流的情况,出于安全原因怎么办?
方案一:大改堆场布局
和全自动化码头一样,内外集卡工作区分离。这基本上是欲练神功,先挥刀自宫的操作。
方案二:小改堆场布局
内外集卡车道/作业车道隔离,尽量减小混流的可能性。十字路口没办法。
方案三:啥也不动
舍也不动,无人驾驶你自己看着办。
大多数人会选择方案三,大多数兄弟都觉得:都无人驾驶了,很多方案都能上社会道路了,还解决不了混流的问题?
场景不同,视角不同,面对的问题不同,对于港方来说,无法获得外集卡的状态,还真的难解决,有以下原因:
- 集装箱码头堆场没有红路灯,路口谁等谁?
- 社会道路有很多可选路径,消费级场景,能到达目的地即可,但是工作场景,需要在最优路径和最佳时间到达目的地。
- 无人集卡不知道拐弯进入工作车道后会发生什么,也不知道能不能进去?
- ...
所以,在混流条件下无人驾驶系统需要除了自身感知系统之外的上帝之眼,告诉它在它视距之外的路况,告诉他行驶策略,对集装箱码头运营来说才能实现整体性、综合性的资源计划编制和调度。
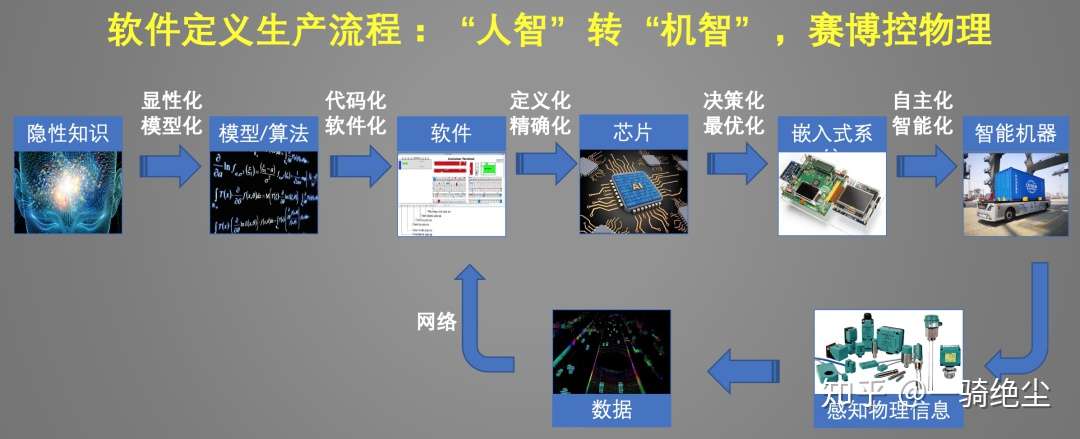
另外,传统的无人驾驶 ECS通过无线网络和 Socket 协议方式与设备进行状态交互的方式存在时延较大的问题。
车辆自动化等级 自动化程度
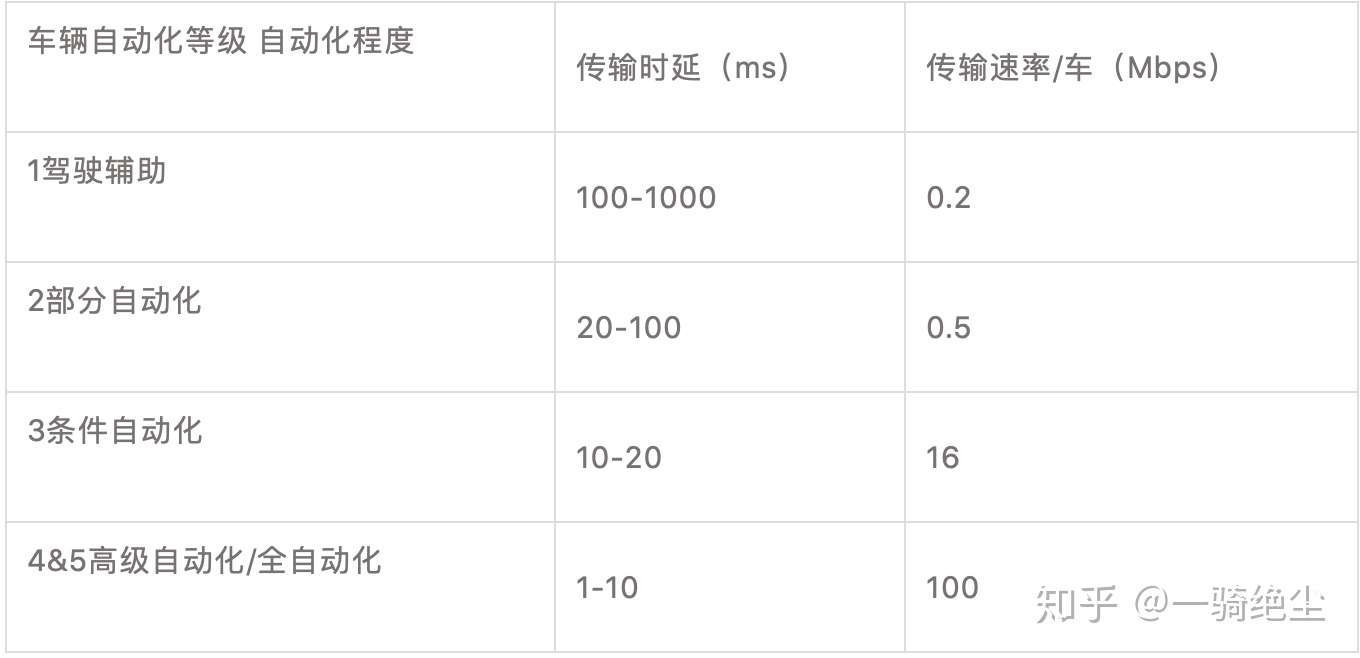
资料来源:《华为 5G 无线网络规划解决方案白皮书》
so,V2X 是解决上述问题最好的方案,码头的半开放场景也趋近于社会道路,无论是场景大小、场景非常适合 V2X 的解决方案的测试和验证。
0x03、集装箱码头 V2X 应用场景
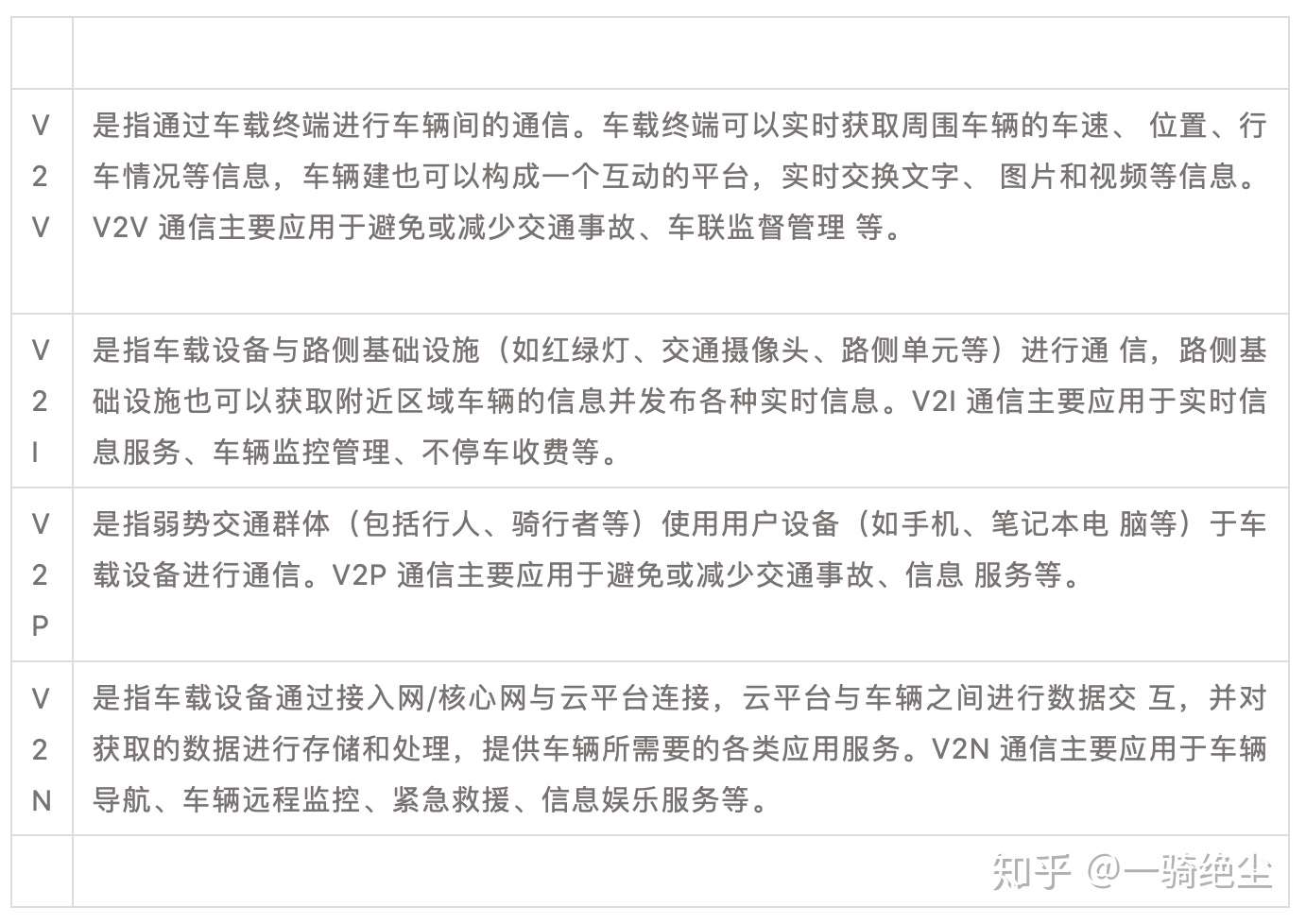
V2P
这个很简单了,虽然现场很少有机会出现人,但是过渡阶段和极端场景还是存在,比如集中装卸锁区域,或者码头面进行特种箱作业需要现场人员协助时,区域内可能出现人,通过 V2P 可以让无人驾驶系统提前感知人的存在和对车辆未来路径的影响,提前进行行驶策略的变更 。
V2V
第二个 V 主要还是解决场内除无人集卡外其它作业设备的状态感知和协同问题。比如与桥吊的协作,从粗定位到 CPS 精确对位引导,然后到装卸作业过程交互;与场桥的协作,过转道状态感知等等。
V2I
与路侧单元的交互。外集卡肯定是没有交互的能力,但是通过路侧单元感知外集卡后,通过路侧单元与无人驾驶系统进行交互 ,就可以完美知道全场所有设备的状态,路网状态,保证无人驾驶系统计算最佳路径的有效性。
0x04、科普一下 V2X
自 R16冻结以来,最近大量的关于车联网的机构研报涌出。
首先,要知道,目前有两大V2X技术标准:DSRC VS LTE-V。
专用短程通信技术(Dedicated Short Range Communications,DSRC)是基 于WiFi演进的技术,它利用IEEE 802.11p,在车载环境(WAVE)中添加无线接入 ,允许车辆之间以及车辆和路边基础设施之间的低延迟通信 。现阶段其延时已能够 满足主动安全所需要20ms以内的延时需求。
DSRC 技术更成熟 , 商用化程度领先 。美国交通部 在 2014 年将 DSRC 确认为 V2V的标准,并希望在2023年开始100%新车安装DSRC。此外,欧洲和日本 也都采用DSRC标准,并推出了相关的网联汽车计划。
LTE-V更先进。我国LTE-V2X技术自主创新程度高,2018年10月已宣布使用LTE-V2X的计划 ,并专门为联网汽车预留了频谱 。国家发改委预计到2020年, 大城市、 高速公路的车用无 线通信网络(LTE-V2X)覆盖率达到90%。
DSRC与C-V2X比较

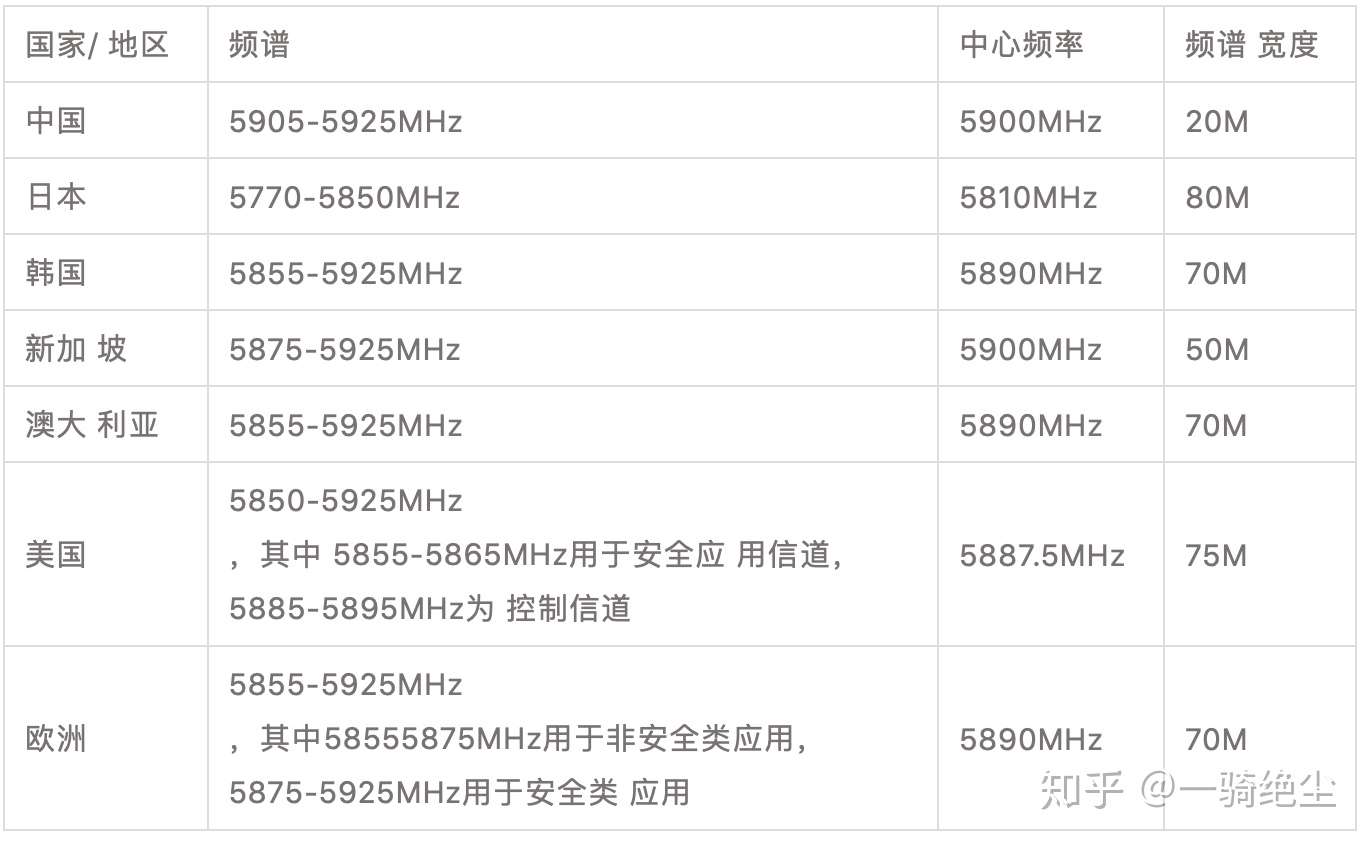
各国车联网频率资源分配情况
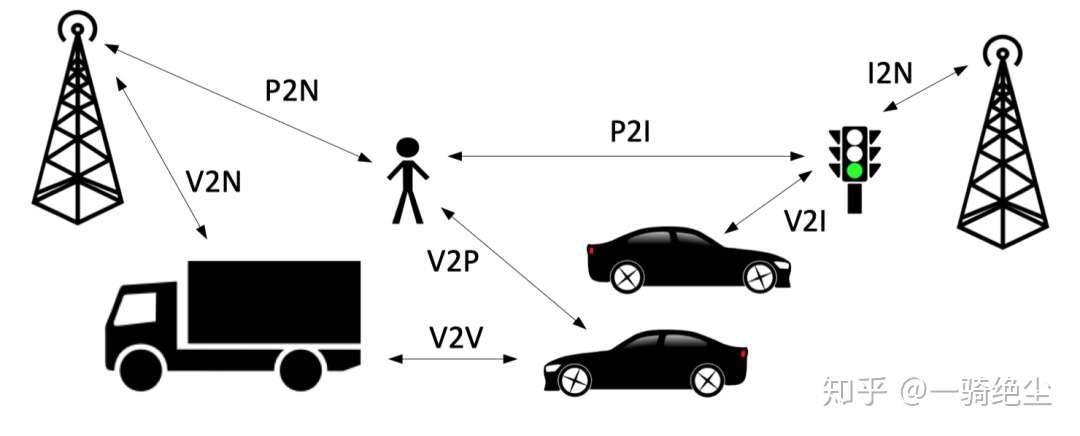
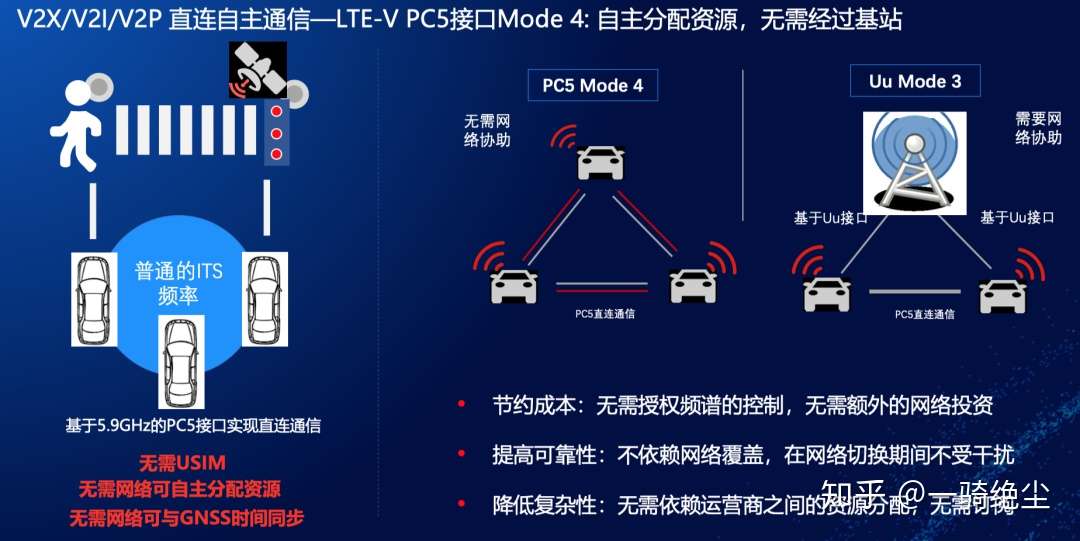
5G V2X 连接方式:
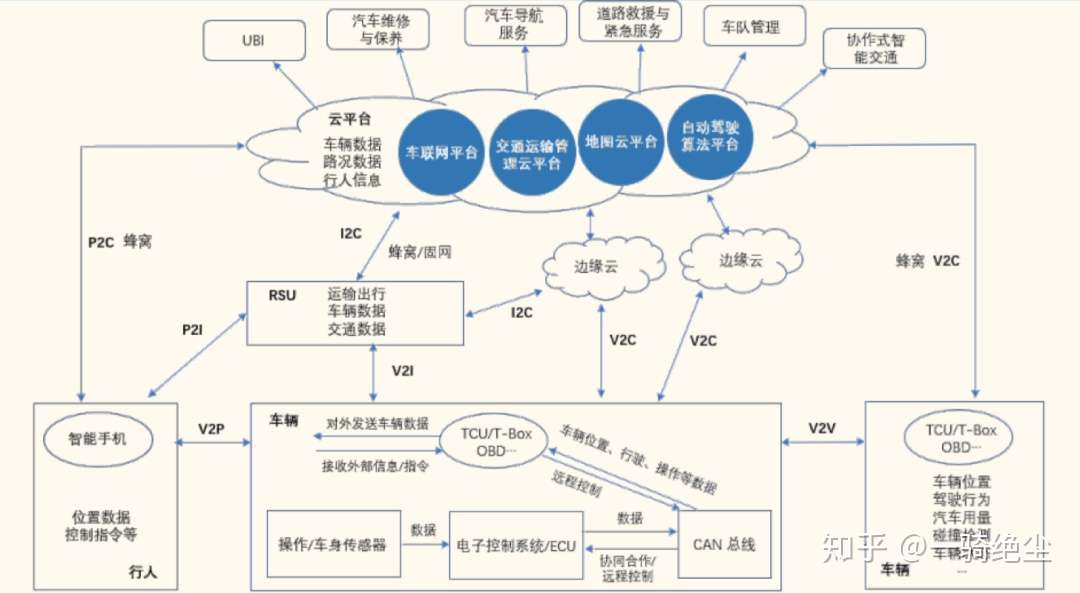
V2X 是实现车路协同的关键技术手段,我国大力推动 C-V2X 发展
车路协同是构建车联网 “人 -车 -路 -云 ”生态体系的关键。车联网的生态范畴包括 面向路侧的“ 智慧道路” 、面向车侧的 “智能驾驶 ”、面向云侧的 “智能管控 ”以及 面向车内人员以及路上行人的“ 智能服务”, 涵盖了 “人-车- 路-云 ”四个层次。作 为链接„人‟、„车‟、„路‟的核心环节, 车路协同在构建车联网生态过程中起到关 键作用。
V2X 是唯一不受天气状况影响的车用传感 技术,无论雨、雾或强光照射都不会影响其正常工作。
0x05、最后再讲个故事
上周跟着几个摄友去江北拍照,在停车场停车的时候把一车卡宴给撞了。来看一下,从无人驾驶角度审视一下这次事件吧。

主要原因,传感器融合层面出现了问题:
我倒车有个惯性,看着倒车可视系统进行倒车,而且我倒车喜欢踩油门,我清楚地知道,视频比倒车雷达反应要快,我经常一脚油门下去,视频中我的车尾已经贴近对方车辆权限,然后踩刹车,车停后2秒左右 ,倒车雷达才会反应过来给出提示音,也就是雷达检测结果的反应其实是比较慢的。所以之前一直都是忽略雷达提示。而上周倒车撞车,主要原因是晚上,再加上倒车可视摄像头脏了,然后和往常一样,倒车一脚油门下去,就嘭~撞上了,然后,过了2秒,雷达反应过来:滴~~~~
结合一下无人驾驶系统的设计,总结 一下经验,:
- 单一感知传感器靠不住啊,上面我的场景就是因为视觉系统挂了;
- 感知融合系统应用策略有问题,说通俗一点就是我脑子的策略有问题,当时完全把雷达给忘记了,虽然平时没用到雷达提示。
- 操作不规范
再结合一下这个文章讲的 V2X,如果这个停车场有路侧单元,RSU 就可以告诉我这个停车场已经没有车位了,我就不用开进去了,不开进去我就不会在那狭小的空间里倒车调头了,也就不会撞车了。
卡宴掉了一点油漆,保险公司赔了3000块!V2X 快点来吧!
欢迎各位行家指正沟通,我的公众号:顾式传说
