下载并安装Ubuntu映像文件
[TurtleBot3]
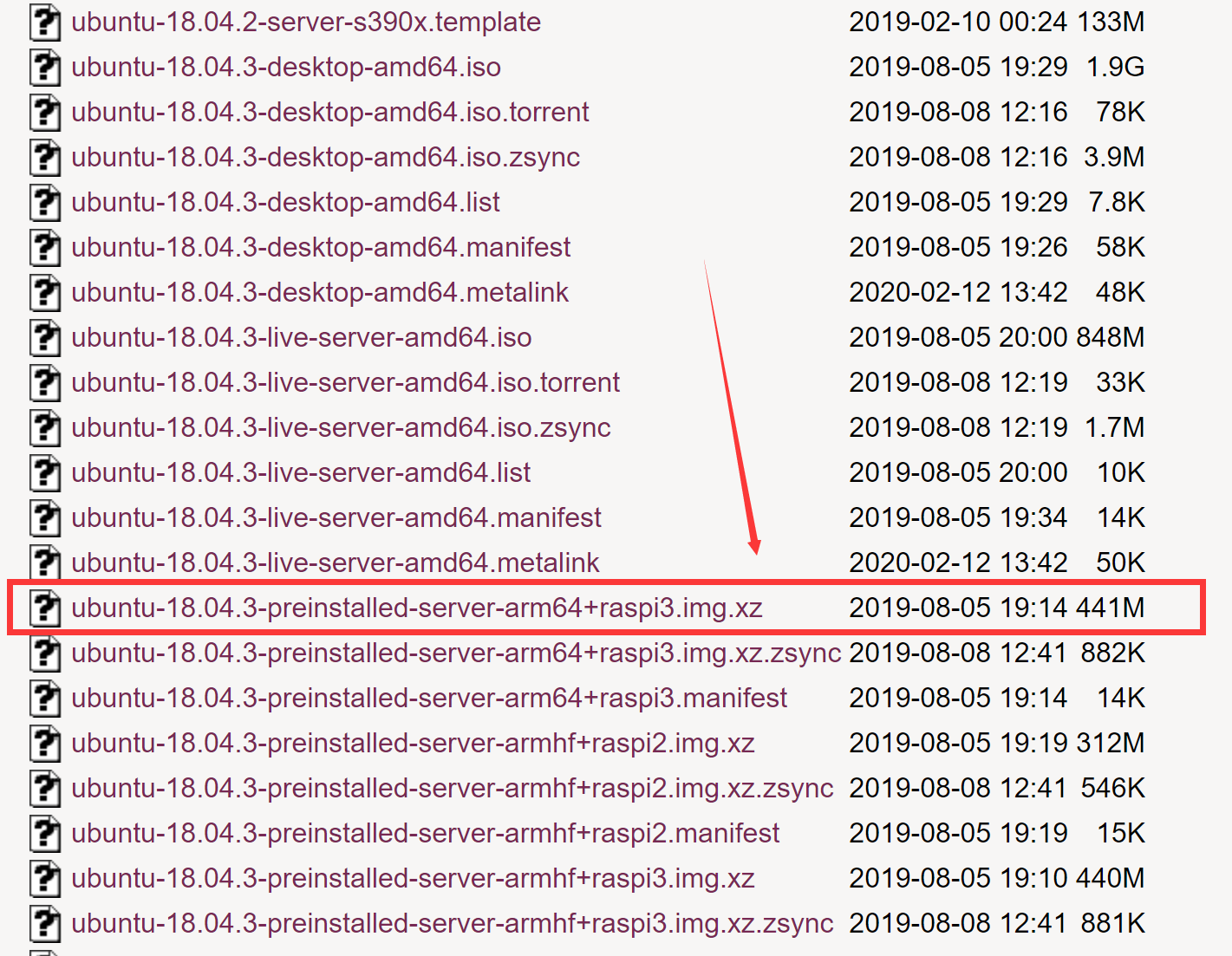
1.转到Ubuntu旧版本。
2.在远程PC上下载ubuntu-18.04.3-preinstalled-server-arm64+raspi3.img.xz
3.将Ubuntu映像文件刻录到microSD卡。
提示:您可以GNOME Disks用来刻录ubuntu-18.04.3-preinstalled-server-arm64+raspi3.img.xz到microSD。
Raspberry Pi 3的初始化过程
[TurtleBot3]
将具有图像文件的microSD卡插入TurtleBot3的SBC上的microSD卡插槽中后,启动Raspberry Pi 3。
(您可以将HDMI电缆,键盘和鼠标连接到TurtleBot3中)
使用默认的用户名(ubuntu)和密码(ubuntu)登录。
(登录后,系统会询问您是否更改密码)
您可以利用netplan配置WiFi网络设置。请参阅Netwrok配置示例。
注意:TurtleBot3是一种移动机器人,可以使用无线网络运行SLAM和Navigation2,因此建议将TurtleBot3连接到Wifi。
网络配置
[TurtleBot3]
在SBC上打开终端
创建一个文件夹,然后使用以下命令将其打开。
sudo touch /etc/netplan/01-netcfg.yaml sudo nano /etc/netplan/01-netcfg.yaml
打开文件后,如下所示输入网络设置。请注意每行的缩进。
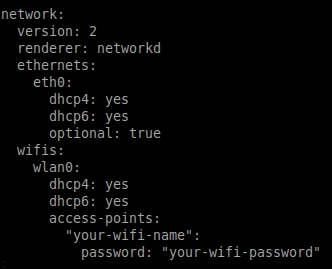
配置完成后,远程PC可以按照以下步骤连接到TurtleBot3中的SBC。
应用渲染器的所有配置,然后重新启动Raspberry Pi 3。
sudo netplan apply reboot
设置systemd可以防止启动延迟,即使启动时没有网络也是如此。运行以下命令以systemd使用以下命令设置掩蔽该过程。
systemctl mask systemd-networkd-wait-online.service
从现在开始,您可以使用SSH。请参阅将远程PC连接到SBC
PC远程连接到SBC
[远程PC]
在远程PC上打开终端
使用以下命令。
ssh ubuntu@<NETWORK IP of Raspberry PI>