文章目录
HAL库串口驱动详解
STM32硬件串口收发数据过程
串口发送流程–TXD
配置步骤:
- 编程USARTx_CR1的M位来定义字长。
- 编程USARTx_CR2的STOP位来定义停止位位数。
- 编程USARTx_BRR寄存器确定波特率。
- 使能USARTx_CR1的UE位使能USARTx。
- 如果进行多缓冲通信,配置USARTx_CR3的DMA使能(DMAT)。
- 使能USARTx_CR1的TE位使能
发送器。/* 配置1~6步骤 */ HAL_UART_Init(UART_HandleTypeDef *huart)发送数据:
- 向发送数据寄存器TDR写入要发送的数据(对于M3,发送和接收共用DR寄存器)。
- 向TRD寄存器写入最后一个数据后,等待状态寄存器USARTx_SR(ISR)的TC位置1,传输完成。
/* 发送数据 */ HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
串口接收流程–RXD
配置步骤:
- 编程USARTx_CR1的M位来定义字长。
- 编程USARTx_CR2的STOP位来定义停止位位数。
- 编程USARTx_BRR寄存器确定波特率。
- 使能USARTx_CR1的UE位使能USARTx。
- 如果进行多缓冲通信,配置USARTx_CR3的DMA使能(DMAT)。
- 使能USARTx_CR1的RE位为1使能
接收器。- 如果要使能接收中断(接收到数据后产生中断),使能USARTx_CR1的RXNEIE位为1。
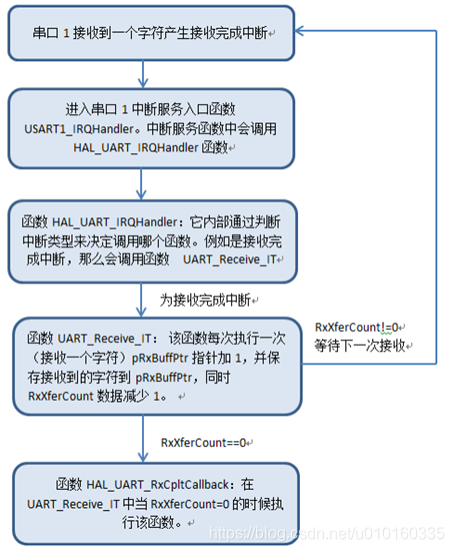
/* 配置1~6步骤 */ HAL_UART_Init(UART_HandleTypeDef *huart) /* 配置7步骤:开启接收中断,并且设置接收缓冲剂最大接收数据量 */ HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)当串口接收到数据时:
- USARTx_SR(ISR)的RXNE位置1。表明移位寄存器内容已经传输到RDR(DR)寄存器。已经接收到数据并且等待读取。
- 如果开启了接收数据中断(USARTx_CR1寄存器的RXNEIE位为1),则会产生中断。(程序上会执行中断服务函数)
- 如果开启了其他中断(帧错误等),相应标志位会置1。
- 读取USARTx_TDR(DR)寄存器的值,该操作会自动将RXNE位清零,等待下次接收后置位。
/* 步骤1 ,获取状态标志位通过标识符实现 */ __HAL_UART_GET_FLAG //判断状态标志位 __HAL_UART_GET_IT_SOURCE //判断中断标志位 /* 步骤2~3,中断服务函数 */ void USARTx_IRQHandler(void) ; /* 步骤4,读取接收数据 */ HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL库运行过程
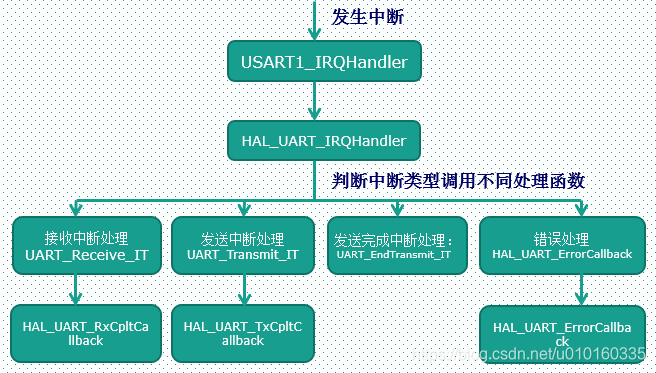
串口接收中断程序配置过程(HAL库):
- 初始化串口相关参数,使能串口:HAL_UART_Init();
- 串口相关IO口配置,复用配置:
在HAL_UART_MspInit中调用HAL_GPIO_Init函数。- 串口接收中断优先级配置和使能:
HAL_NVIC_EnableIRQ();
HAL_NVIC_SetPriority();- 使能串口接收中断:HAL_UART_Receive_IT();
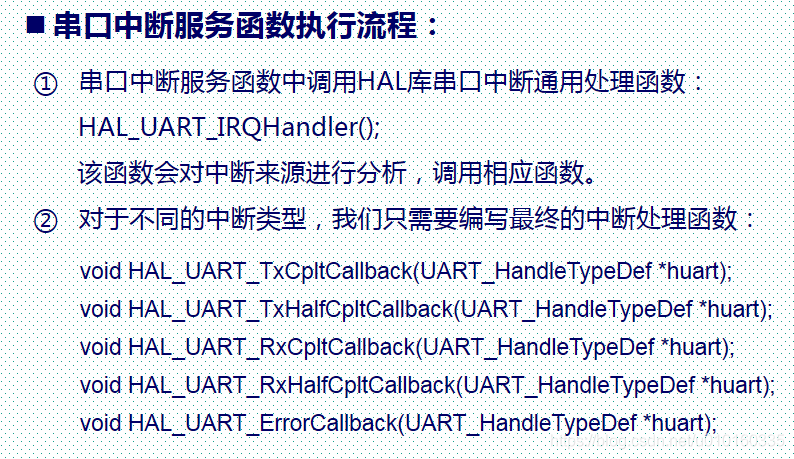
- 编写中断服务函数:USARTx_IRQHandler
参考例程
STM32F0例程(STM32F030F4P6)
STM32F1例程(STM32F103C8T6)
STM32F7例程(STM32F767IGTx)
uint8_t rData[1];
uint8_t tData[] = "this is test data.";
UART_HandleTypeDef huart1;
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_USART1_UART_Init();
while (1)
{
HAL_UART_Transmit(&huart1, tData, tData(test), 1000);
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_1);
HAL_Delay(500);
}
}
/* USART1 init function */
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
}
/* HAL_UART_Init(&huart1)调用此函数进行串口硬件底层配置 */
void HAL_UART_MspInit(UART_HandleTypeDef* huart)
{
GPIO_InitTypeDef GPIO_InitStruct;
if(huart->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* Peripheral clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* 开启接收中断,并初始化串口接收指针 */
HAL_UART_Receive_IT(&huart1, rData, 1);
/* USER CODE END USART1_MspInit 1 */
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
/* 接收一个字节数据直接发出去 */
HAL_UART_Transmit(&huart1, rData, 1, 1000);
/* 每次需要重新初始化接收结构体指针 */
HAL_UART_Receive_IT(&huart1, rData, 1);
}