前言
昨天已经将OpenRAVE配置好了,接下来就是配置IKFast插件了。
ikfast,机器人运动学的编译器,在Rosen Diankov OpenRAVE运动规划软件提供,是一个强大的逆运动学求解器。不像大多数的逆运动学求解,ikfast可以求解任意复杂运动链的运动学方程,并产生特定语言的文件(如C++)后供使用。最终的结果是非常稳定的解决方案,在最新的处理器能以5微秒的速度完成运算。From:https://www.ncnynl.com/archives/201610/1046.html
参考文献:有详细的如何生成(UR5)https://zhuanlan.zhihu.com/p/97364652
如何制作ikfast的插件(两篇差不多):https://blog.csdn.net/Kalenee/article/details/80740258
一、配置流程
1.将机器人模型由.xacro文件转为.urdf文件
这里的.xacro为你需要转化的机器人模型的描述文件,ur3.urdf是你想要新生成的.urdf文件的名称。我这里的ur3_joint_limited_robot.urdf.xacro后面加了robotiq85夹爪,因此后面的模型可视化是带有夹爪的。
rosrun xacro xacro --inorder -o ur3.urdf ur3_joint_limited_robot.urdf.xacro2.将机器人模型.urdf转为.dae文件
rosrun collada_urdf urdf_to_collada ur3.urdf ur3.dae如果出现 [rospack] Error: package ‘collada_urdf’ not found,运行以下程序,即可解决
sudo apt-get install ros-melodic-collada-urdf3.设置精度
设置的精度会影响IKFAST的生成,设置过小会导致无法生成或求解精度过低,过大也会导致无法生成或者求解变慢,可以根据需求调整精度。这里设置精度为小数点后5位,并备份生成的ur3.dae文件,方便以后调整使用。
# 先备份
cp ur3.dae ur3.backup.dae
# 设置精度
export IKFAST_PRECISION="5"
rosrun moveit_kinematics round_collada_numbers.py ur3.dae ur3.dae "$IKFAST_PRECISION"4.查看关节数据
openrave-robot.py ur3.dae --info links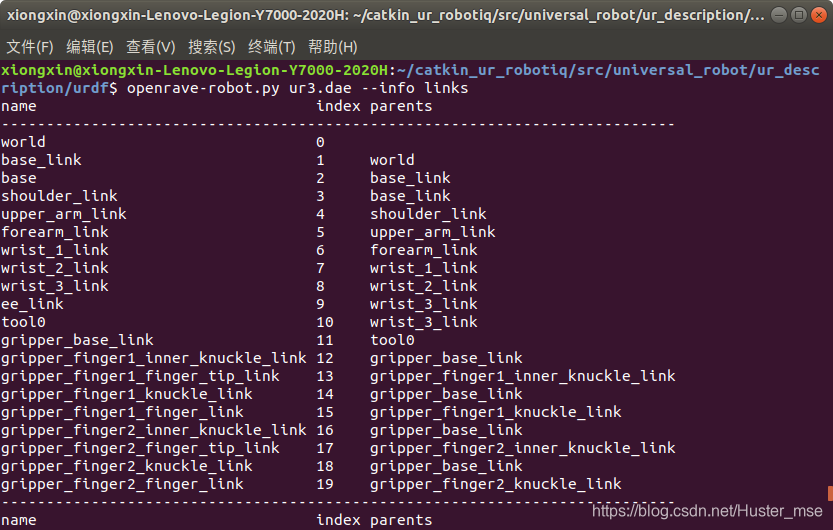
5.查看关节模型
openrave ur3.dae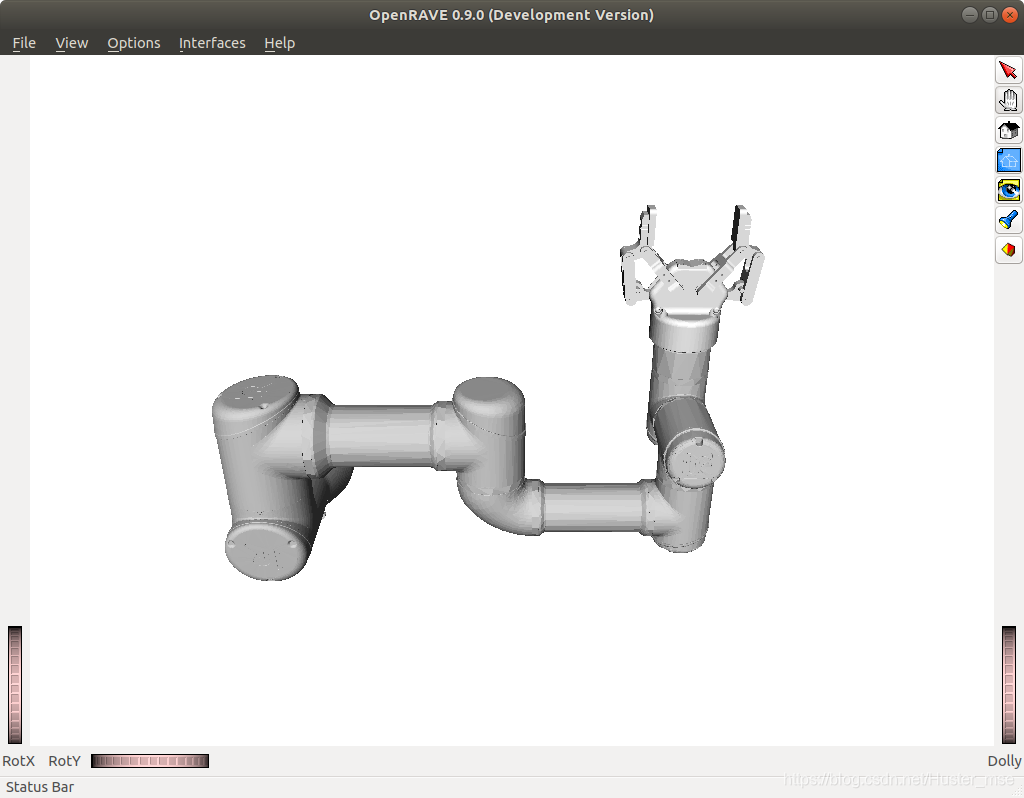
6.生成IKFast的cpp文件
这里的ur3.dae是之前第二步转化你得到的名字,baselink和eelink的值根据你之前查看的关节数据以及自己在setup assistant里面配置Planning Group里面的设置。由于我采用的无论是UR3还是UR5都是6DOF,所以直接默认transform6d就行,最后的savefile是你想保存的路径和名称。最后两篇参考文献讲的很清楚如何配置这些参数,不懂的可以去那里详细看看。生存过程比较久,大概是20分钟的样子,可以刚好开一局王者(23333)。
python `openrave-config --python-dir`/openravepy/_openravepy_/ikfast.py --robot=ur3.dae --iktype=transform6d --baselink=0 --eelink=9 --savefile=$(pwd)/ikfast61.cpp7. 使用 ikfast61.cpp 求逆解
此处需要将ikfast.h和ikfast61.cpp放在同一个文件夹下。
g++ ikfast61.cpp -o ikfast -llapack -std=c++11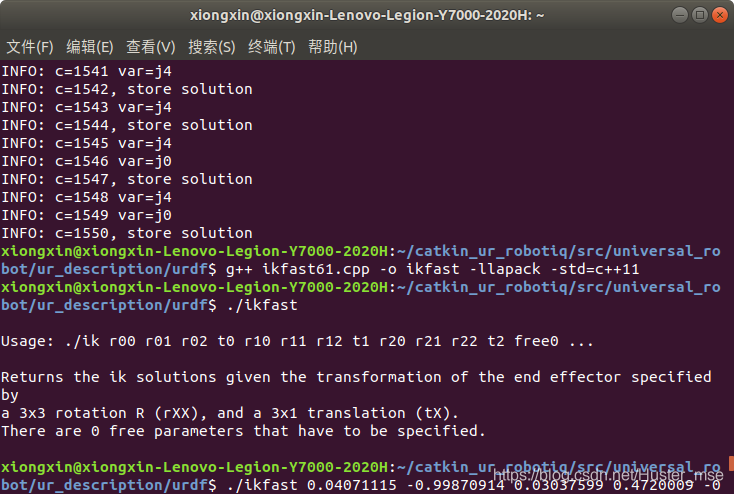
由于目前网上只有UR5的配置作参考,为了验证成功配置,因此还用UR5来验证,成功得到了8组逆解。(UR机器人8组逆解,参考来源:https://www.zhihu.com/question/47605775/answer/113477680)
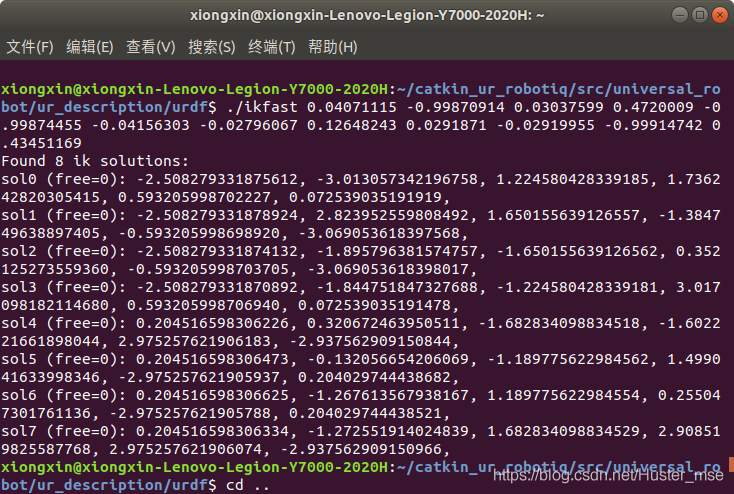
因此表示安装完成,后面可以进一步生成插件导入rviz中。生成插件的部分自行参考前言给出的后两篇参考文献,基本上不存在什么坑,按照步骤catkin_make就行,之后可以查看自己的kinematics.yaml,发现已经变成了ikfast。
然后可以roslaunch自己相应的config包里面demo.launch来对比改变前后的区别。
目前我在rviz里面没有体会到特比大的区别,时间上因为rviz不止是运动学求解的时间,还有其他时间,因此没有体会到4微秒那样的速度。
总结
也算是把ikfast配置好了,接下来要做的就是给定TCP(tool center point)的6D位姿,反解出各个关节角的值。这几天准备看一些机器人的基础理论知识,冲冲冲。