Dynamsoft Barcode Reader SDK一款多功能的条码读取控件,只需要几行代码就可以将条码读取功能嵌入到Web或桌面应用程序。这可以节省数月的开发时间和成本。能支持多种图像文件格式以及从摄像机或扫描仪获取的DIB格式。使用Dynamsoft Barcode Reader SDK,你可以创建强大且实用的条形码扫描仪软件,以满足你的业务需求。
在仓库管理系统中,可以使用Drone自动扫描条形码以进行库存盘点。为了学习无人机驾驶并尝试在空中进行条形码扫描,我购买了Ryze Tello,这是由DJI提供动力的微型无人机。在本文中,我将分享如何使用Dynamsoft Barcode Reader实时检测和解码Tello无人机视频流中的条形码。
将Tello Video Sample从Python 2.7移植到Python 3.7
示例代码dji-sdk / Tello-Python是Tello无人机控制的良好速成课程。但是,该存储库的维护似乎已停止,并且该代码仅适用于Python 2.7。
由于不再支持Python 2,并且我正在使用Python 3.7,因此我必须更改Python代码并重建相关的h264解码库,以便与Python 3兼容。
在Windows上运行Tello Video Sample的步骤
从DJI的GitHub存储库中获取源代码。
git clone https://github.com/dji-sdk/Tello-Python.git
将项目导入到您的编码工具。全局搜索并用以下代码段替代Python 3.7:
2.7
import Tkinter
3.7
import tkinter
2.7
print ""
3.7
print()
2.7
packet_data = ""
3.7
packet_data = bytes()
要构建h264解码库,首先,通过vcpkg安装ffmpeg :
vcpkg.exe install ffmpeg:x64-windows
之后,获取h264decoder的源代码并构建Python模块:
git clone https://github.com/DaWelter/h264decoder.git
cd h264decoder
python setup.py build_ext --cmake-args="-DCMAKE_TOOLCHAIN_FILE=[path to vcpkg]/scripts/buildsystems/vcpkg.cmake"
为什么要使用Dynamsoft Python条形码SDK
条形码扫描是一项占用大量CPU的操作,因此,在Python线程中运行它会遭受GIL的性能瓶颈的困扰。为了避免性能问题,Dynamsoft Python Barcode SDK提供了一组基于C / C ++本机线程实现的视频解码API:
start_video_mode()
append_video_frame()
stop_video_mode()
带条形码扫描的Tello无人机
安装Dynamsoft Python的条码SDK,这对于Python 3.6,3.7和3.8:
pip install dbr
申请免费试用许可证以解锁所有功能。
在tello.py中创建条形码阅读器对象:
from dbr import
self.reader = BarcodeReader()
self.reader.init_license('LICENSE-KEY')
初始化参数并启动视频模式:
parameters = self.reader.init_frame_decoding_parameters()
self.frameWidth = 640 # max: 960
self.frameHeight = 480 # max: 720
self.results = None
parameters.image_pixel_format = EnumImagePixelFormat.IPF_RGB_888
parameters.max_queue_length = 2
parameters.max_result_queue_length = 2
parameters.width = self.frameWidth
parameters.height = self.frameHeight
parameters.stride = self.frameWidth 3
parameters.auto_filter = 1
self.reader.start_video_mode(parameters, self.on_barcode_result)
Tello无人机的相机分辨率为720P。我们可以通过回调函数保存解码结果,以便稍后进行UI渲染:
def on_barcode_result(self, data):
self.results = data
接下来,转到_receive_video_thread()函数,将接收到的帧追加到条形码解码队列中:
for frame in self._h264_decode(packet_data):
self.frame = cv2.resize(frame, (self.frameWidth, self.frameHeight))
try:
ret = self.reader.append_video_frame(self.frame)
except:
pass
注意:除非您想加快解码速度,否则不必调整帧的大小(大图像对于识别精度更好)。
最后,我们将stop_video_mode()添加到析构函数方法中:
def del(self):
self.reader.stop_video_mode()
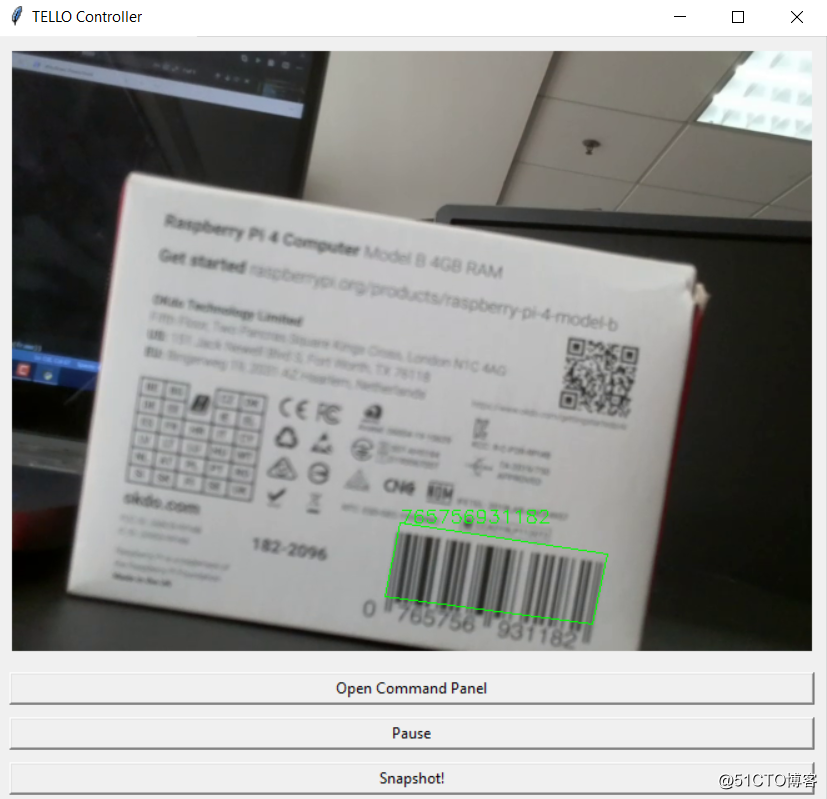
通过几行Python代码,我实现了Tello无人机的条形码扫描。让我们尝试一下Tello无人机GUI应用程序:
python main.py
环境如何影响无人机的视觉系统
当我在办公室测试无人机的视频流时,我发现图像不清晰。
在Tello SDK用户指南中没有提到用于调整焦点的命令。
此外,即使我已经校准了IMU(惯性测量单元),泰洛( Tello)无人机在微光环境中徘徊时也很难保持静止。