开源自主导航小车MickX4(七)cartographer 室外3D建图
首先,在前面我们已经实现了2D建图,为什么还要测试室外的3D建图?
- 前面的地图构建时候是通过压缩3D到2D,实际只取了16线激光雷达中的一条线,信息利用不充分,建图的效果也不理想。
- 3D转2D的建图在空旷的场景(空间大于20m)时2D点就比较稀疏了,会造成地图更新失败,小车无法计算自己的位姿的情况。
- 3D 转2D 以后在空旷或者非结构化的场景(室外的树)会造成定位不准。
1 cartographer 3D建图demo
3D建图的时候需要提供IMU的信息,这里我们使用的是Xsens MTi-30的IMU,XsensIMU的安装方法可以参考我们博客。

1.1 cartographer 安装
cartographer 的安装可以参考我们上一篇博客中的介绍。
1.2 3D数据集建图
使用3D激光雷达建图的时候我们必须要结合IMU,使用IMU提供的重力方向向量。这里我们直接根据官网[1] 的步骤进行运行,首先你需要去下载这个3D数据包[5]
其次我们需要将官网上的 “offline_backpack_3d.launch”替换为 “demo_backpack_3d.launch”,否则在保存地图的时候会出现无法调用
启动3D激光雷达建图
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=/media/crp/0E3C06880E3C0688/b3-2016-04-05-13-54-42.bag
Cartography-3D建图
等到数据运行完毕以后调用 write_state 服务来保存地图
rosservice call /write_state ~/demo_3d_local.pbstream
将这个pbstream文件进一步转化成3D的ply点云文件(注意使用绝对路径)
roslaunch cartographer_ros assets_writer_backpack_3d.launch bag_filenames:=/media/crp/0E3C06880E3C0688/b3-2016-04-05-13-54-42.bag pose_graph_filename:=/home/administrator/demo_3d_local.pbstream

等待一段时间,处理完成后命令会自动退出,此时在bag文件旁边会生成一个.bag_points.ply后缀文件,这个就是点云文件[6].最后利用PCL自带的工具将ply文件转换成pcd文件
pcl_ply2pcd b3-2016-04-05-13-54-42.bag_points.ply test_3d.pcd
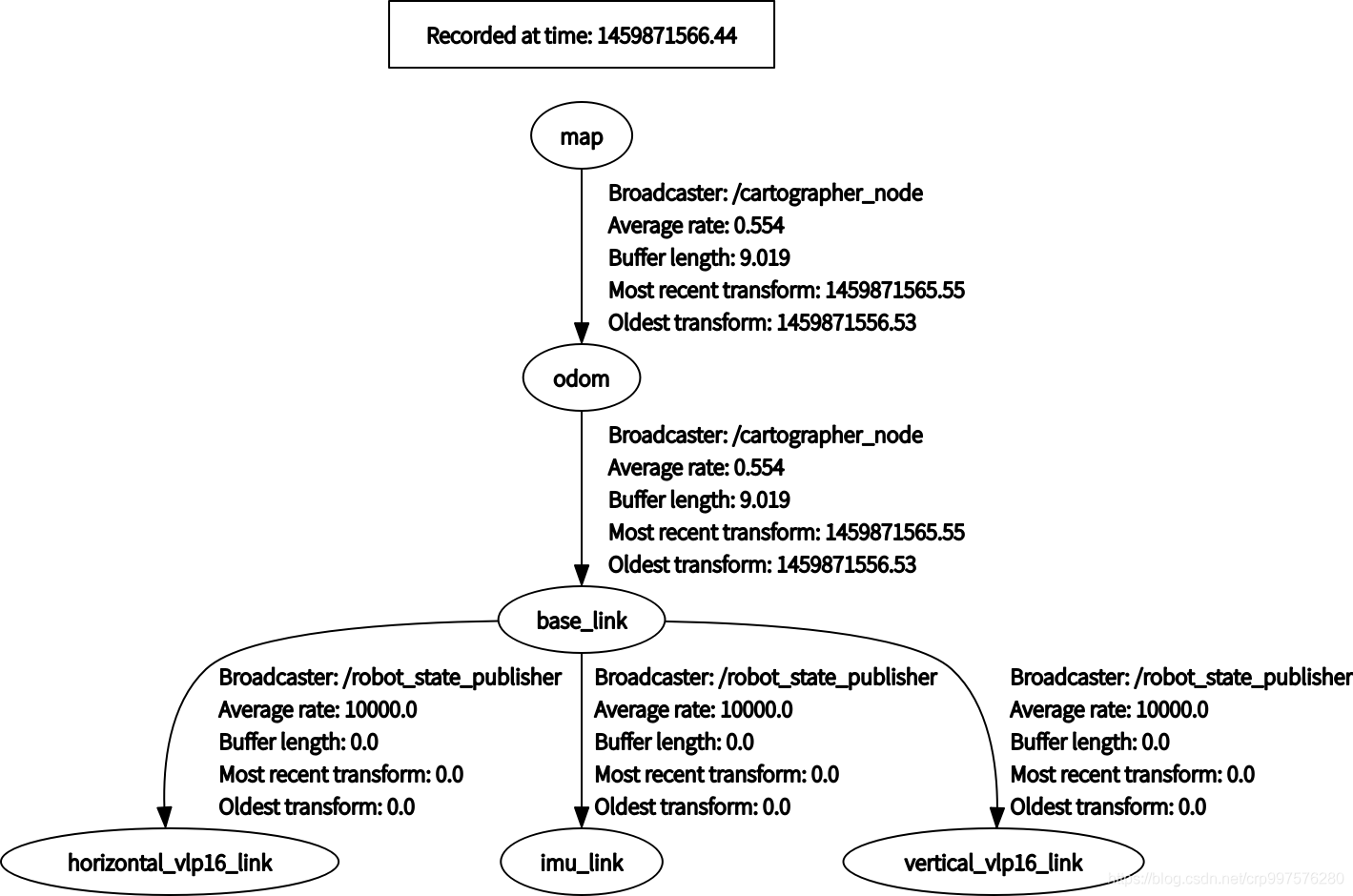
在运行的时候,机器人的位姿是发布在TF中的,如下图所示。因此我们可以通过读取odom->map之间的坐标变换来知道机器人的位置

这个TF关系是通过 目录 “cartographer_ros/cartographer_ros/urdf/backpack_3d.urdf” 这个urdf文件来进行配置的
以下是建图时候所使用的部分配置参数
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 2, #使用两个点云
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
1.3 3D定位
3D定位我们是利用在3.1部分生成的 “***~/3d_local.pbstream***”作为已有地图,将当前激光数据输入进行匹配,估计位置
cartographer_ros demo_backpack_3d_localization.launch load_state_filename:=/home/crp/3d_local.pbstream bag_filename:=/media/crp/0E3C06880E3C0688/b3-2016-04-05-15-52-20.bag
Cartography-3D定位
同样在运行定位的时候,机器人的位姿也是发布在TF中的,如下图所示。因此我们可以通过读取odom->map之间的坐标变换来知道机器人的位置。(可以明显看出,定位时候的位姿输出频率要远远低于建图时候的频率)
定位时候的参数(在建图参数上增加了两行)
include "backpack_3d.lua"
TRAJECTORY_BUILDER.pure_localization = true
POSE_GRAPH.optimize_every_n_nodes = 100
return options
2 小车上的3D建图
2.1 配置launch文件
新建文件 demo_mickx4_3d.launch ,填入以下内容:
<launch>
<param name="/use_sim_time" value="true" />
<include file="$(find cartographer_ros)/launch/mickx4_mapping_3d.launch" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/mickx4_mapping_3d.rviz" />
<node name="playbag" pkg="rosbag" type="play" args="--clock $(arg bag_filename)" />
</launch>
2.2 配置TF 关系
3D建图必须要加入IMU设备,IMU的坐标这里于demo的坐标系保持一致(发布imu_link 到 base_link之间的关系),这里我是用URDF 文件传入的。 新建文件 mickx4_mapping_3d.launch ,填入以下内容:
<launch>
<param name="robot_description" textfile="$(find cartographer_ros)/urdf/mickx4.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename mickx4_mapping_3d.lua"
output="screen">
<remap from="points2" to="/rslidar_points" />
<remap from="/imu" to="/imu/data" />
<remap from="/odom" to="/odom" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
</launch>

2.3 配置lua参数文件
这里我发现四轮差速的里程计不准,也就没有使用里程计。有里程及计的话TF 树也是这样,只需要吧topic和参数(provide_odom_frame 和 use_odometry)使能就可以了
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu_link",
published_frame = "base_footprint",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 0,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 1,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
TRAJECTORY_BUILDER_3D.num_accumulated_range_data = 1
TRAJECTORY_BUILDER_3D.min_range = 0.2
TRAJECTORY_BUILDER_3D.max_range = 150
TRAJECTORY_BUILDER_2D.min_z = 0.1
TRAJECTORY_BUILDER_2D.max_z = 1.0
TRAJECTORY_BUILDER_3D.use_online_correlative_scan_matching = false
MAP_BUILDER.use_trajectory_builder_3d = true
MAP_BUILDER.num_background_threads = 4
POSE_GRAPH.optimization_problem.huber_scale = 5e2
POSE_GRAPH.optimize_every_n_nodes = 320
POSE_GRAPH.constraint_builder.sampling_ratio = 0.03
POSE_GRAPH.optimization_problem.ceres_solver_options.max_num_iterations = 20
POSE_GRAPH.constraint_builder.min_score = 0.5
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.55
POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e3
POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e3
return options
启动 cartographer 建图节点
roslaunch cartographer_ros demo_mickx4_3d.launch bag_filename:=/home/administrator/bagfiles/mick_2021-01-27-21-34-13.bag
下面是在实验室门口外运行的视频,场景属于室外小范围场景
Cartographer 在机器人上实现3D建图-小场景
等到数据运行完毕以后调用 write_state 服务来保存地图
rosservice call /write_state ~/mickx4_3d_mapping.pbstream
修改以后的 cartographer_ros和相关的配置参数 可以在我的github [7] 上找到。
3 大范围场景测试
3.1 路线1
第一个场景是围绕我们学校的主教楼转了一圈,大约有1公里,最后回环没有回上,我只保留了效果较好的一部分地图。地图在有结构化的场景中建图效果是比较好的,在操场边那个地方停有很多的车,其环境比较空旷。在这种情况下感觉估计的位姿就不准了,导致后面的点云有重影
roslaunch cartographer_ros demo_mickx4_3d.launch bag_filename:=/home/administrator/bagfiles/MickX4_Dataset/mick_2021-02-01-15-43-14.bag
cartographer-室外-3D-大场景建图-1KM
3.2 路线2
第一个场景是围绕我们学校的几个楼之间转了一圈,大约有1.5公里。这个场景中大部分都是沿着公路走的,公路旁边都是建筑物和数,整体的定位效果很好,走一圈下来位置也没差多远,估计有个2M左右。
roslaunch cartographer_ros demo_mickx4_3d.launch bag_filename:=/home/administrator/bagfiles/MickX4_Dataset/mick_2021-02-01-15-22-28.bag
cartographer-室外-3D-大范围场景-1.5KM
有需要 大范围场景测试 中的两个录制的bag的同学,可在评论区留下邮箱。(记得来一波点赞加关注哦)
4 小结
cartographer 3D 建图的效果不是很理想,总体而言存在很多的噪点。但是3D建图的效果比2D要好的多,主要是2D是利用3D进行压缩得到的2D平面,室外毕竟不是规则的环境,这个鲁棒性还是要弱一些,因此在室外使用2D激光还是不是太好。测试中还发现:
1)cartographer 3D 对环境比较敏感(校园里面树木比较多,一般都长在路面两侧,会建筑物的墙面有遮挡,导致结构化的元素比较少。因此在这段区域建图的效果就不是很好。等到了后面的路线中,没有树木了,激光可以扫描到两边的墙体时候建图的效果就好了很多了)
2)对地面也比较敏感,在中间的一段,地面有坑,导致小车会上下颠簸,这种因素也会对建图产生影响。
3)激光打到地面,carto 没有去地面的操作,因此需要我们自己调节激光发射角度,调整激光打到地面上的程度
效果比起LOAM系列的框架还是有点差距。后续可以尝试使用LOAM系列的框架进行测试

此外,蓝鲸机器人博客[8]上的资料很详细,对cartography 的演示demo也完全可以复现,因此如果跑不起来也可以参考以下他们的资料[6]。
参考资料
[1] https://www.cnblogs.com/hitcm/p/5939507.html
[2] https://blog.csdn.net/crp997576280/article/details/103279649
[3] https://github.com/cartographer-project/cartographer_ros
[4] https://github.com/cartographer-project/cartographer
[5] https://github.com/ceres-solver/ceres-solver
[6] https://github.com/BluewhaleRobot/cartographer_ros
[7] https://github.com/RuPingCen/cartographer-modify
[8] https://community.bwbot.org/topic/523/%E8%B0%B7%E6%AD%8Ccartographer%E4%BD%BF%E7%94%A8%E9%80%9F%E8%85%BE%E8%81%9A%E5%88%9B3d%E6%BF%80%E5%85%89%E9%9B%B7%E8%BE%BE%E6%95%B0%E6%8D%AE%E8%BF%9B%E8%A1%8C%E4%B8%89%E7%BB%B4%E5%BB%BA%E5%9B%BE
上一篇:开源自主导航小车MickX4(六)cartographer 室外2D建图
下一篇:开源自主导航小车MickX4(八)LeGo-LOAM 室外3D建图
欢迎大家点赞在评论区交流讨论([email protected]) O(∩_∩)O
或者加群交流(1149897304)
