二、目标跟踪系统评估方式
主要参考:https://blog.csdn.net/hjl240/article/details/52453030
论文:Online Object Tracking: A Benchmark
Precision plot
Success Plot
方法:OPE、TRE、SRE
用精确度和成功率进行定量分析。此外,从两个方面评估了跟踪算法的鲁棒性。
对用于跟踪的初始边界框进行空间(SRE)和时间采样(TRE),以评估跟踪器的鲁棒性和特性
对于成功图,我们使用AUC分数对跟踪器进行汇总和排名,而对于精确图,我们使用误差阈值为20的结果进行排名
在精确图中,一些追踪器的排名与成功图中的排名略有不同,因为它们基于不同的度量标准,衡量追踪器的不同特性。因为成功图的AUC分数衡量的是整体表现,比图中某个阈值的分数更精确,下面我们主要分析基于成功图的排名,但使用精确图作为辅助。
KCF论文里的说明:(精确曲线。如果预测的目标中心在地面真实的距离阈值内,则可以认为帧被正确跟踪。精度曲线简单地显示了距离阈值范围内正确跟踪帧的百分比。请注意,通过绘制所有阈值的精度,不需要任何参数。这使得曲线清晰且易于解释。低阈值下的更高精度意味着跟踪器更精确,而丢失的目标将阻止它在非常大的阈值范围内达到完美的精度。当需要一个代表性的精度分数时,选择的阈值是20像素)
TRE的平均性能高于OPE
因为从TRE的第一段到最后一段,帧数减少了。由于追踪器往往在较短的序列中表现良好,TRE中所有结果的平均值往往更高。另一方面,
SRE的平均性能低于OPE
初始化错误往往会导致追踪器更新不精确的外观信息,从而导致逐渐漂移。
-
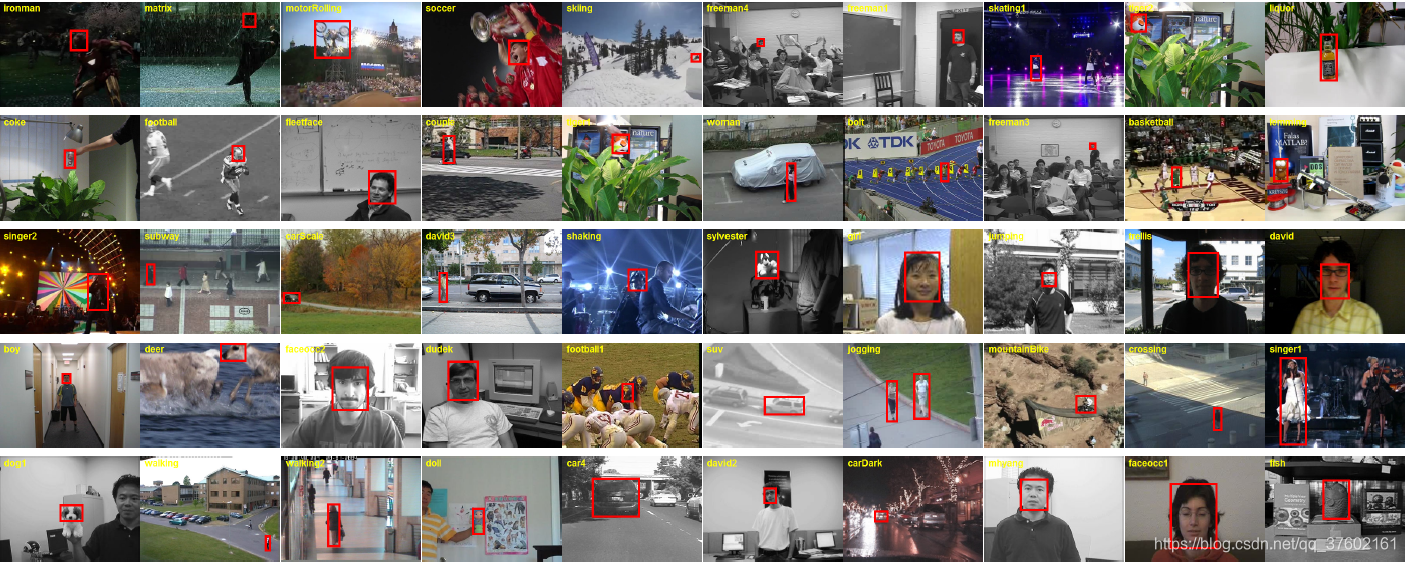
用于评估的跟踪序列,每个序列都显示了带有目标对象边界框的第一帧。这些序列是根据我们的排名结果排序的,左上角的序列比右下角的序列更难追踪
-
数据集中的每个序列都用经常影响跟踪性能的属性进行注释,例如遮挡、快速运动和光照变化。
-
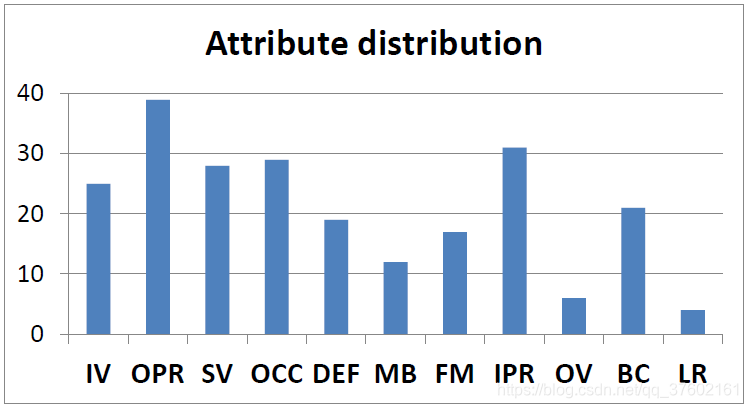
整个测试集的属性分布
成功图
首先定义重合率得分(overlap score,OS),追踪算法得到的bounding box(记为a),与ground-truth给的box(记为b),重合率定义为:OS = |a∩b|/|a∪b|,|·|表示区域的像素数目。当某一帧的OS大于设定的阈值时,则该帧被视为成功的(Success),总的成功的帧占所有帧的百分比即为成功率(Success rate)。OS的取值范围为0~1,因此可以绘制出一条曲线。一般阈值设定为0.5。
成功图显示了成功帧在阈值从0变化到1的比率,使用一个特定阈值下的成功率值(例如to=0.5)跟踪器评估可能不公平或不具有代表性,我们使用每个成功图的曲线下面积(AUE)来排列跟踪算法。
鲁棒性评估
评估跟踪器的传统方法是在整个测试序列中运行跟踪器,从第一帧中的地面真实位置开始初始化,并报告平均精度或成功率。我们将此作为一次评估( OPE )。然而,跟踪器可能对初始化很敏感,并且在不同的起始帧,不同的初始化会使它的性能变得更差或更好。因此,我们提出了两种方法来分析跟踪器对初始化的鲁棒性,一种是在时间上干扰初始化(即从不同的帧开始),另一种是在空间上干扰初始化(即从不同的边界框开始)。这些测试分别被称为时间鲁棒性评估( TRE )和空间鲁棒性评估( SRE )。