| A::B c | A是命名空间,B是命名空间A中的类 c是类B对应的实例化对象 | ||
| A::B() | A是命名空间,B是命名空间中的一个独立的函数,不属于哪个类。 | 如ros::init() | |
| A.B | A是一个类的实例化对象,B是这个对象里面的一个属性,或者理解为类里面的一个变量 | ||
| A.B() | A是一个类的实例化对象,B是这个对象里面的一个函数 | ||
| A.B.C | B是A的类里面一个类成员变量,C是B这种类里面的一个成员变量。 | geometry_msgs::Pose pose pose.position.x 感觉似乎pose类是position类和orientation类的合集,也就是一个大消息是两个小消息的合集,这种类叫什么?一个类继承了两个类这种岂不是叫接口?不是,C++可以多重继承。 |
|
| A.B.C.D | 同A.B.C | geometry_msgs::PoseStamped A A.pose.position.x |
|
| A::B().C() | A是命名空间,意思等同于A::B();A::C(); | |
《C++ primer》247面有说 |
| A.B::C() | ::起到作用域分辨符的作用 | ||
| A::B::C | A和B可能是嵌套的命名空间 还有一种情况,B是A类型里面的枚举类型,枚举类型作为类的成员变量是静态成员变量。(ROS话题消息里面这样写就是这种情况!) |
prometheus_msgs::ControlCommand::Move |
我在C++ primer里还看到过 A.B::C
拍自《C++ primer》549面

https://www.cnblogs.com/dishengAndziyu/p/10916298.html

拍自《C++ primer》247面

============================================================================================================
我看了下双冒号的作用无非是两种,一种是作用域(命名空间),一种是静态类。
拍自《C++ primer》147面

我下面这篇博文也有讲,一般是命名空间。Eigen ros std应该都是命名空间。
很多为了防止不同类里面有相同的函数名称,或者成员名称(就是变量名称嘛,因为类里面包含变量和函数啊,下面Eigen::Vector3d应该不是函数是变量,应该是类名称,然后创建对象)(是的,应该基本都是命名空间,防止重名的出现,确实工程大了之后。你还调用各种库,确实有这种风险)
下面那样写是在创建对象https://www.jianshu.com/p/79bc4ff1a8f8?utm_source=desktop&utm_medium=timeline
就是Eigen::Vector3d pos_drone_mocap; //无人机当前位置 (vicon) 这种写法是在创建对象,而不是一个变量。我是说不对劲,就算是变量也是通过类来引用啊。


《ROS机器人编程原理与应用》这本书里面也明确说了

https://www.cnblogs.com/kimmychul/p/3951229.html

https://blog.csdn.net/sinat_16643223/article/details/107620182



这种我已经多次看到
https://blog.csdn.net/yxpandjay/article/details/80587916

https://www.xuebuyuan.com/2175603.html

https://blog.csdn.net/yaodaoji/article/details/107857790

https://blog.csdn.net/sn_gis/article/details/79009006

可能就是普罗米修斯代码里面没有写using namespace Eigen,所以都带着Eigen::
https://blog.csdn.net/guijiaqing/article/details/106235957

普罗米修斯自身代码里面也有这么写。


https://blog.csdn.net/weixin_40603219/article/details/88596642

《机器人操作系统入门必备 机器人编程一学就会》这里面也专门在C++基础知识里面说了C++中的命名空间,用了双冒号。估计ROS中大部分的双冒号都是命名空间。

这种用法我知道为什么了,看来还是C++的命名空间的基础知识没有掌握好。
https://blog.csdn.net/sn_gis/article/details/79009006

https://www.cnblogs.com/wanghuixi/p/6887390.html

那我现在又有个疑问了,像 ROS的命名空间原本是在哪里写或者定义的呢。这里用的时候直接写ros::就可以,那它最开始是在哪里定义好的呢。也就是它那命名空间是在哪里声明的。
似乎声明是要像下面这样声明,可能他们在写对应的库的时候已经这么写了,比如Eigen库写的时候可能就已经这么写了这么定义了。
https://www.runoob.com/cplusplus/cpp-namespaces.html
怪不得写了using namespace std就没有再写什么using namespace Eigen或者using namespace ros了,在我上面给出的普罗米修斯代码里面。
https://blog.csdn.net/sinat_16643223/article/details/107662464

真的是一点点啃透普罗米修斯的同时也一点点补充着C++和ROS。
现在再看普罗米修斯代码里的这些东西,应该就不会乱了。清楚是创建对象。
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp

这种是不是创建对象的时候同时调用了构造函数
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp
![]()

那ros::init()
ros::spin()
ros::ok()
这种该怎么理解,这些都是ros的基础代码里面用到的,当然普罗米修斯也用到了,这是直接调用一个明明空间下的函数?不应该是先调用类么?
所以ros到底是一个作用域还是一个类名?
Eigen也有这种用法,Eigen在这里讲道理是命名空间,双冒号后面跟了个函数。
![]()
我发现下面不就是命名空间::函数么,这么用说明函数直接写在了命名空间下面没有写在类下面,是不是这个意思?所以ros::init() ros::spin() ros::ok()这几个函数不是写在类里面的,我暂时这么理解吧。
看这篇博文 https://blog.csdn.net/sinat_16643223/article/details/114535835
init()应该是一个单独的函数

这种的又怎么理解
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp

这种三个的我怀疑,第一个是命名空间,第二个是类名,第三个是类中的成员变量名。为什么可以直接这么用,而不用创建对象?

Eigen也是有这样用的,连着三个。
下面拍自《ROS机器人编程原理与应用》157面。

但我总感觉这个不是命名空间,这个普罗米修斯的消息是我们自己定义的,实际内容是那样的,没有看到什么定义命名空间啊。
还是说ROS中的消息就是这么用的?是的,和ROS中其他消息的用法一样 https://www.jianshu.com/p/5c75c24f0fe6
我感觉他们命名空间的名称很多时候和所在功能包名称一样,比如std_msgs。

prometheus_msgs::ControlCommand和 geometry_msgs::PoseStamped性质应该是一样的我感觉他们命名空间的名称很多时候和所在功能包名称一样,比如std_msgs。是否一个节点或者功能包是有自己默认的命名空间的在ROS里面?
https://www.jianshu.com/p/3ed51b015223

prometheus_msgs::ControlCommand和 geometry_msgs::PoseStamped性质应该是一样的https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp


https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/common/msgs/msg/ControlCommand.msg

有一个重大发现,似乎证明了我上面的猜想
https://blog.csdn.net/cookie909/article/details/79842334


这里也说私有名称是用他们节点名称作为命名空间
https://www.cnblogs.com/zjiaxing/p/5541841.html

莫非话题名称前有个斜杠也是因为命名空间!!!!!!!!!!!

libo说这本质是一个值,是命名空间下的命名空间下的一个变量,这么理解的。嵌套的命名空间。

https://blog.csdn.net/weixin_38956024/article/details/112131277

但是上面如果理解成命名空间的嵌套,那下面这就不好理解了啊,我感觉他们本质还是一个类啊,命名空间下的一个类啊。不然怎么创建对象呢。是不是msg文件自动生成类???但是类里面的变量为什么不需要创建对象再去引用呢。
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp

你看这些消息的用法,似乎都是一个类。
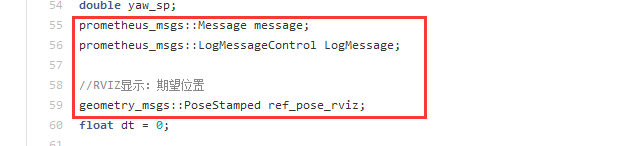

他们自定义的msg也是这么用,可能ROS话题消息都是这么用?包名::消息名 对象名
https://blog.csdn.net/u013453604/article/details/72903398
https://blog.csdn.net/sinat_16643223/article/details/114537318

书上讲自定义消息类型的时候也这么说了,在《ROS机器人编程原理与应用》36面。

可能因为消息里面那几个量的值是定的,跟创建对象没有关系,所以可以直接这么写?那我现在明白为什么静态类可以直接写类名了,确实你不创建对象,那几个量的值都是确定的!!!!!!我对这个理解更进一步了
下面拍自《ROS机器人开发实践》44面

https://blog.csdn.net/weixin_40539125/article/details/84112472

https://blog.csdn.net/sinat_16643223/article/details/114539707

我在《ROS机器人编程原理与应用》这本书里面也看到普罗米修斯里面这种A::B::C这种用法了,看来普罗米修斯里面这样写不是个例,可能真的大家都是这么写的。

看了下那几个变量确实已经给值了


我去看了下普罗米修斯的ControlCOmmand.msg对应的头文件里面,那几个给了值的量,是放在枚举里面。是不是因为是枚举类型所以这么写?写为A::B::C,我搜了下还真的是,枚举类型作为类的成员变量的时候是静态成员变量!!!!!!!!!!我们这种深入本质深入源码去找才真正彻底弄清楚为什么这么写,我原本是猜测它自动生成头文件时那些赋值的变量前面自动加上typedef或者static什么的,刚刚有这种想法所以重启电脑进入Ubuntu看,虽然不是那样但确实是自动生成头文件改了些东西,所以用的时候只能那么写!!!!!!!!
ControlCommand.h
// Generated by gencpp from file prometheus_msgs/ControlCommand.msg
// DO NOT EDIT!
#ifndef PROMETHEUS_MSGS_MESSAGE_CONTROLCOMMAND_H
#define PROMETHEUS_MSGS_MESSAGE_CONTROLCOMMAND_H
#include <string>
#include <vector>
#include <map>
#include <ros/types.h>
#include <ros/serialization.h>
#include <ros/builtin_message_traits.h>
#include <ros/message_operations.h>
#include <std_msgs/Header.h>
#include <prometheus_msgs/PositionReference.h>
namespace prometheus_msgs
{
template <class ContainerAllocator>
struct ControlCommand_
{
typedef ControlCommand_<ContainerAllocator> Type;
ControlCommand_()
: header()
, Command_ID(0)
, source()
, Mode(0)
, Reference_State() {
}
ControlCommand_(const ContainerAllocator& _alloc)
: header(_alloc)
, Command_ID(0)
, source(_alloc)
, Mode(0)
, Reference_State(_alloc) {
(void)_alloc;
}
typedef ::std_msgs::Header_<ContainerAllocator> _header_type;
_header_type header;
typedef uint32_t _Command_ID_type;
_Command_ID_type Command_ID;
typedef std::basic_string<char, std::char_traits<char>, typename ContainerAllocator::template rebind<char>::other > _source_type;
_source_type source;
typedef uint8_t _Mode_type;
_Mode_type Mode;
typedef ::prometheus_msgs::PositionReference_<ContainerAllocator> _Reference_State_type;
_Reference_State_type Reference_State;
// reducing the odds to have name collisions with Windows.h
#if defined(_WIN32) && defined(Idle)
#undef Idle
#endif
#if defined(_WIN32) && defined(Takeoff)
#undef Takeoff
#endif
#if defined(_WIN32) && defined(Hold)
#undef Hold
#endif
#if defined(_WIN32) && defined(Land)
#undef Land
#endif
#if defined(_WIN32) && defined(Move)
#undef Move
#endif
#if defined(_WIN32) && defined(Disarm)
#undef Disarm
#endif
#if defined(_WIN32) && defined(User_Mode1)
#undef User_Mode1
#endif
#if defined(_WIN32) && defined(User_Mode2)
#undef User_Mode2
#endif
enum {
Idle = 0u,
Takeoff = 1u,
Hold = 2u,
Land = 3u,
Move = 4u,
Disarm = 5u,
User_Mode1 = 6u,
User_Mode2 = 7u,
};
typedef boost::shared_ptr< ::prometheus_msgs::ControlCommand_<ContainerAllocator> > Ptr;
typedef boost::shared_ptr< ::prometheus_msgs::ControlCommand_<ContainerAllocator> const> ConstPtr;
}; // struct ControlCommand_
typedef ::prometheus_msgs::ControlCommand_<std::allocator<void> > ControlCommand;
typedef boost::shared_ptr< ::prometheus_msgs::ControlCommand > ControlCommandPtr;
typedef boost::shared_ptr< ::prometheus_msgs::ControlCommand const> ControlCommandConstPtr;
// constants requiring out of line definition
template<typename ContainerAllocator>
std::ostream& operator<<(std::ostream& s, const ::prometheus_msgs::ControlCommand_<ContainerAllocator> & v)
{
ros::message_operations::Printer< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >::stream(s, "", v);
return s;
}
template<typename ContainerAllocator1, typename ContainerAllocator2>
bool operator==(const ::prometheus_msgs::ControlCommand_<ContainerAllocator1> & lhs, const ::prometheus_msgs::ControlCommand_<ContainerAllocator2> & rhs)
{
return lhs.header == rhs.header &&
lhs.Command_ID == rhs.Command_ID &&
lhs.source == rhs.source &&
lhs.Mode == rhs.Mode &&
lhs.Reference_State == rhs.Reference_State;
}
template<typename ContainerAllocator1, typename ContainerAllocator2>
bool operator!=(const ::prometheus_msgs::ControlCommand_<ContainerAllocator1> & lhs, const ::prometheus_msgs::ControlCommand_<ContainerAllocator2> & rhs)
{
return !(lhs == rhs);
}
} // namespace prometheus_msgs
namespace ros
{
namespace message_traits
{
template <class ContainerAllocator>
struct IsFixedSize< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
: FalseType
{ };
template <class ContainerAllocator>
struct IsFixedSize< ::prometheus_msgs::ControlCommand_<ContainerAllocator> const>
: FalseType
{ };
template <class ContainerAllocator>
struct IsMessage< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
: TrueType
{ };
template <class ContainerAllocator>
struct IsMessage< ::prometheus_msgs::ControlCommand_<ContainerAllocator> const>
: TrueType
{ };
template <class ContainerAllocator>
struct HasHeader< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
: TrueType
{ };
template <class ContainerAllocator>
struct HasHeader< ::prometheus_msgs::ControlCommand_<ContainerAllocator> const>
: TrueType
{ };
template<class ContainerAllocator>
struct MD5Sum< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
{
static const char* value()
{
return "452e60a420203d6b2f7bcba6708b37bc";
}
static const char* value(const ::prometheus_msgs::ControlCommand_<ContainerAllocator>&) { return value(); }
static const uint64_t static_value1 = 0x452e60a420203d6bULL;
static const uint64_t static_value2 = 0x2f7bcba6708b37bcULL;
};
template<class ContainerAllocator>
struct DataType< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
{
static const char* value()
{
return "prometheus_msgs/ControlCommand";
}
static const char* value(const ::prometheus_msgs::ControlCommand_<ContainerAllocator>&) { return value(); }
};
template<class ContainerAllocator>
struct Definition< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
{
static const char* value()
{
return "std_msgs/Header header\n"
"\n"
"## 控制命令的编号 防止接收到错误命令, 编号应该逐次递加\n"
"uint32 Command_ID\n"
"\n"
"## 消息来源\n"
"string source\n"
"## 控制命令的模式 \n"
"uint8 Mode\n"
"# enum Mode 控制模式枚举\n"
"uint8 Idle=0\n"
"uint8 Takeoff=1\n"
"uint8 Hold=2\n"
"uint8 Land=3\n"
"uint8 Move=4\n"
"uint8 Disarm=5\n"
"uint8 User_Mode1=6\n"
"uint8 User_Mode2=7\n"
"\n"
"## 控制参考量 \n"
"## 位置参考量:位置、速度、加速度、加加速度、加加加速度\n"
"## 角度参考量:偏航角、偏航角速度、偏航角加速度\n"
"PositionReference Reference_State\n"
"\n"
"================================================================================\n"
"MSG: std_msgs/Header\n"
"# Standard metadata for higher-level stamped data types.\n"
"# This is generally used to communicate timestamped data \n"
"# in a particular coordinate frame.\n"
"# \n"
"# sequence ID: consecutively increasing ID \n"
"uint32 seq\n"
"#Two-integer timestamp that is expressed as:\n"
"# * stamp.sec: seconds (stamp_secs) since epoch (in Python the variable is called 'secs')\n"
"# * stamp.nsec: nanoseconds since stamp_secs (in Python the variable is called 'nsecs')\n"
"# time-handling sugar is provided by the client library\n"
"time stamp\n"
"#Frame this data is associated with\n"
"string frame_id\n"
"\n"
"================================================================================\n"
"MSG: prometheus_msgs/PositionReference\n"
"std_msgs/Header header\n"
"\n"
"## 位置控制参考量\n"
"\n"
"## 默认为 XYZ位置追踪模式 (sub_mode = 0); 速度追踪启用时,控制器不考虑位置参考量及位置状态反馈\n"
"uint8 Move_mode\n"
"\n"
"uint8 XYZ_POS = 0 ##0b00\n"
"uint8 XY_POS_Z_VEL = 1 ##0b01\n"
"uint8 XY_VEL_Z_POS = 2 ##0b10\n"
"uint8 XYZ_VEL = 3 ##0b11\n"
"uint8 XYZ_ACC = 4\n"
"uint8 TRAJECTORY = 5 \n"
"\n"
"uint8 Move_frame\n"
"# 默认情况下均为ENU_FRAME,注意轨迹追踪和XYZ_ACC一定是ENU_FRAME\n"
"uint8 ENU_FRAME = 0\n"
"uint8 BODY_FRAME = 1\n"
"uint8 MIX_FRAME = 2 ##2020.4.6 临时增加的模式,后期需要统一整合,该模式下,xy采用机体系控制,z采用enu系控制\n"
"\n"
"## 时刻: 用于轨迹追踪\n"
"float32 time_from_start ## [s]\n"
"\n"
"## 参考量:位置、速度、加速度、加加速度、加加加速度\n"
"float32[3] position_ref ## [m]\n"
"float32[3] velocity_ref ## [m/s]\n"
"float32[3] acceleration_ref ## [m/s^2]\n"
"## float32[3] jerk_ref ## [m/s^3]\n"
"## float32[3] snap_ref ## [m/s^4]\n"
"\n"
"## 角度参考量:偏航角、偏航角速度、偏航角加速度\n"
"float32 yaw_ref ## [rad]\n"
"## float32 yaw_rate_ref ## [rad/s] \n"
"## float32 yaw_acceleration_ref ## [rad/s] \n"
;
}
static const char* value(const ::prometheus_msgs::ControlCommand_<ContainerAllocator>&) { return value(); }
};
} // namespace message_traits
} // namespace ros
namespace ros
{
namespace serialization
{
template<class ContainerAllocator> struct Serializer< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
{
template<typename Stream, typename T> inline static void allInOne(Stream& stream, T m)
{
stream.next(m.header);
stream.next(m.Command_ID);
stream.next(m.source);
stream.next(m.Mode);
stream.next(m.Reference_State);
}
ROS_DECLARE_ALLINONE_SERIALIZER
}; // struct ControlCommand_
} // namespace serialization
} // namespace ros
namespace ros
{
namespace message_operations
{
template<class ContainerAllocator>
struct Printer< ::prometheus_msgs::ControlCommand_<ContainerAllocator> >
{
template<typename Stream> static void stream(Stream& s, const std::string& indent, const ::prometheus_msgs::ControlCommand_<ContainerAllocator>& v)
{
s << indent << "header: ";
s << std::endl;
Printer< ::std_msgs::Header_<ContainerAllocator> >::stream(s, indent + " ", v.header);
s << indent << "Command_ID: ";
Printer<uint32_t>::stream(s, indent + " ", v.Command_ID);
s << indent << "source: ";
Printer<std::basic_string<char, std::char_traits<char>, typename ContainerAllocator::template rebind<char>::other > >::stream(s, indent + " ", v.source);
s << indent << "Mode: ";
Printer<uint8_t>::stream(s, indent + " ", v.Mode);
s << indent << "Reference_State: ";
s << std::endl;
Printer< ::prometheus_msgs::PositionReference_<ContainerAllocator> >::stream(s, indent + " ", v.Reference_State);
}
};
} // namespace message_operations
} // namespace ros
#endif // PROMETHEUS_MSGS_MESSAGE_CONTROLCOMMAND_H
https://blog.csdn.net/bbjjqq/article/details/6079289

那么现在应该是可以真正非常彻底地啃透普罗米修斯里面比如 px4_pos_estimate.cpp的代码了。
我希望你去啃Tensorflow的代码也像这样去啃。
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/control/src/px4_sender.cpp

上面那个那样写确实就是命名空间下一个独立的函数,没有被类包含的,看来我的推测是对的。我在普罗米修斯代码里面找了下,确实就是这样。所以可以推测 ros::init() ros::ok() ros::spin()这种应该也是同样的情况!!!!!!!!!


《ROS机器人开发实践》里面有写ROS中的命名空间

总结好了之后,再去看opencv的代码都会好得多。
现在可以完全确定引用(我知创建实例化对象的时候,不是那种静态值直接用的,当然静态值直接用最前面那个也是命名空间,那就都一样吧,都是命名空间)ROS话题消息::最前面那个就是命名空间!!!!!
https://blog.csdn.net/sinat_16643223/article/details/114730336

所以以后再看到双冒号,最前面那个就是命名空间!!!!!几乎不用犹豫什么。
那分析一下这种情况怎么理解。

现在来分析一下这种情况,结合这篇博文: https://blog.csdn.net/sinat_16643223/article/details/114730336

讲道理一个消息就是一种类,你包含了其他的消息就是包含了其他的类啊,
所以你看pose这个消息的头文件里面是include了的poin和quaternion这两个消息的头文件的

上面写的struct似乎也是定义类的。

这应该就是一个函数。这应该是多重继承的写法

http://m.biancheng.net/view/2277.html

这也应该是继承的写法。

我想起java是不能多重继承的,得用接口,是不是C++可以多重继承。
而且我刚刚发现上面正是多重继承下的构造函数!!!!!Pose_()正是构造函数!!!!!
http://m.biancheng.net/view/2277.html

所以ROS里面一个消息类型是由其他小消息类型组合而成的,在C++层面上是通过多重继承实现的。
那这种A.B.C的写法是不是属于子类调用或者访问父类成员变量,B是父类。
我现在有点怀疑是不是结构体嵌套。虽然C++中结构体和类没那么大区分,但是通过结构体嵌套的概念比较好解释,不然为什么它不写成类?当然我再C++ primer里面也看到有类嵌套。
https://blog.csdn.net/sinat_16643223/article/details/114765223


https://www.cnblogs.com/lanhaicode/p/10312032.html

https://blog.csdn.net/JoeBlackzqq/article/details/7098329

那这种写法其实就是说Pose_这个结构体继承了 Message这个结构体,按照上面的,继承结构体时也是写的Public!!!
https://blog.csdn.net/sinat_16643223/article/details/114730336

或许关键是这两句,相当于一个类里面有两个其他类成员变量。这算不算嵌套类?是啊,一个类里面的成员变量就是一个类的实例化对象,这种情况怎么弄。这应该是很常见的情况啊是不是。这不是嵌套类,嵌套类是一个类定义在另一个类的内部(《C++ primer》746面),这不是,这应该就是普通的情况。

似乎叫类类型,《C++ primer》有说到类类型,这种是不是就叫类类型,类里面有个类类型成员?甚至类类型成员里面还有类类型成员,这么一层层包着。
https://blog.csdn.net/shengwenj/article/details/49337223

我们可以再来验证一下,这种是不是也是类中有类成员。

可以看到这个Command_Now也是一个话题消息类型的实例化对象。
![]()
你看,在ContrilCommand.msg里面它就直接写了一个
PositionReference Reference_State就是一个类类型的成员变量不是!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/common/msgs/msg/ControlCommand.msg

https://gitee.com/maxibooksiyi/Prometheus/blob/master/Modules/common/msgs/msg/PositionReference.msg

也怪不得PoseStamped话题消息类型定义里面就两句话,我一开始还以为是不是弄错了,现在觉得没有,就是两个类类型成员变量!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!那这样我的理解是对的。
https://github.com/ros/common_msgs/blob/noetic-devel/geometry_msgs/msg/PoseStamped.msg

那么现在看这个也应该好理解了,为什么是A.B.C.D对吧,这么多点。
拍自《ROS机器人编程原理与应用》330面


https://blog.csdn.net/sinat_16643223/article/details/114542703
