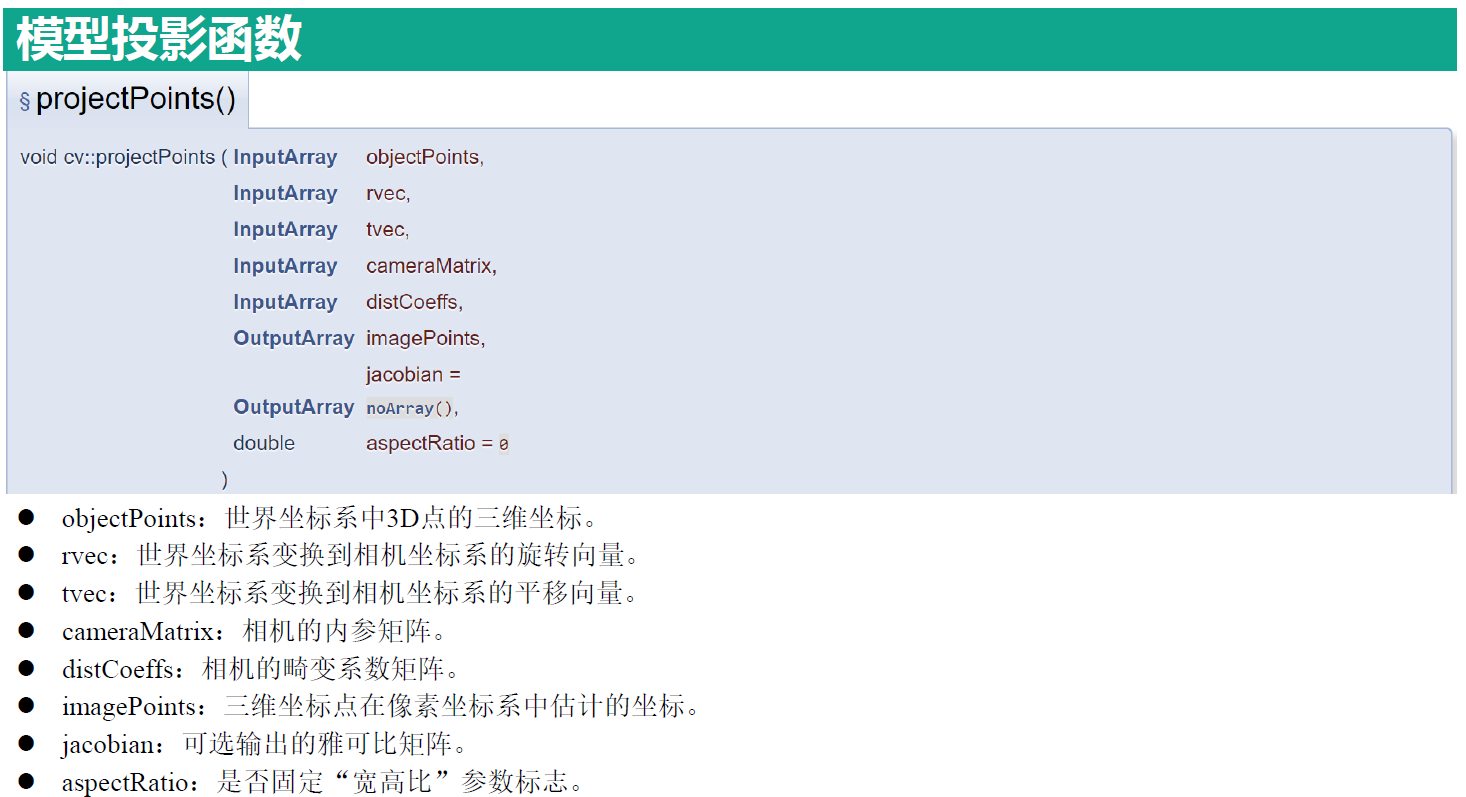
OpenCV4中提供了projectPoints()函数用于计算世界坐标系中的三维点投影到像素坐标系中的二维坐标。
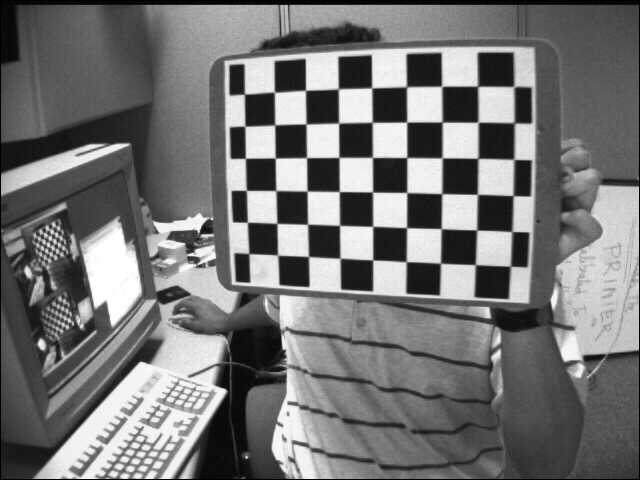
例:程序参数来自下述图片
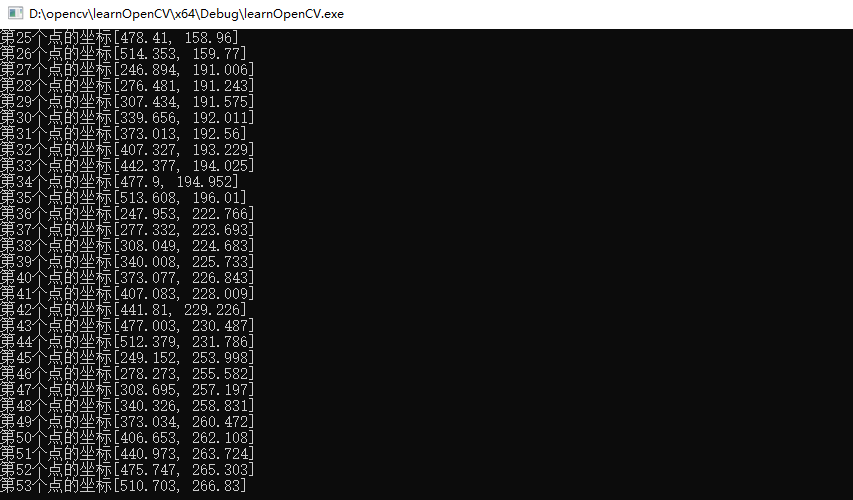
运行结果:
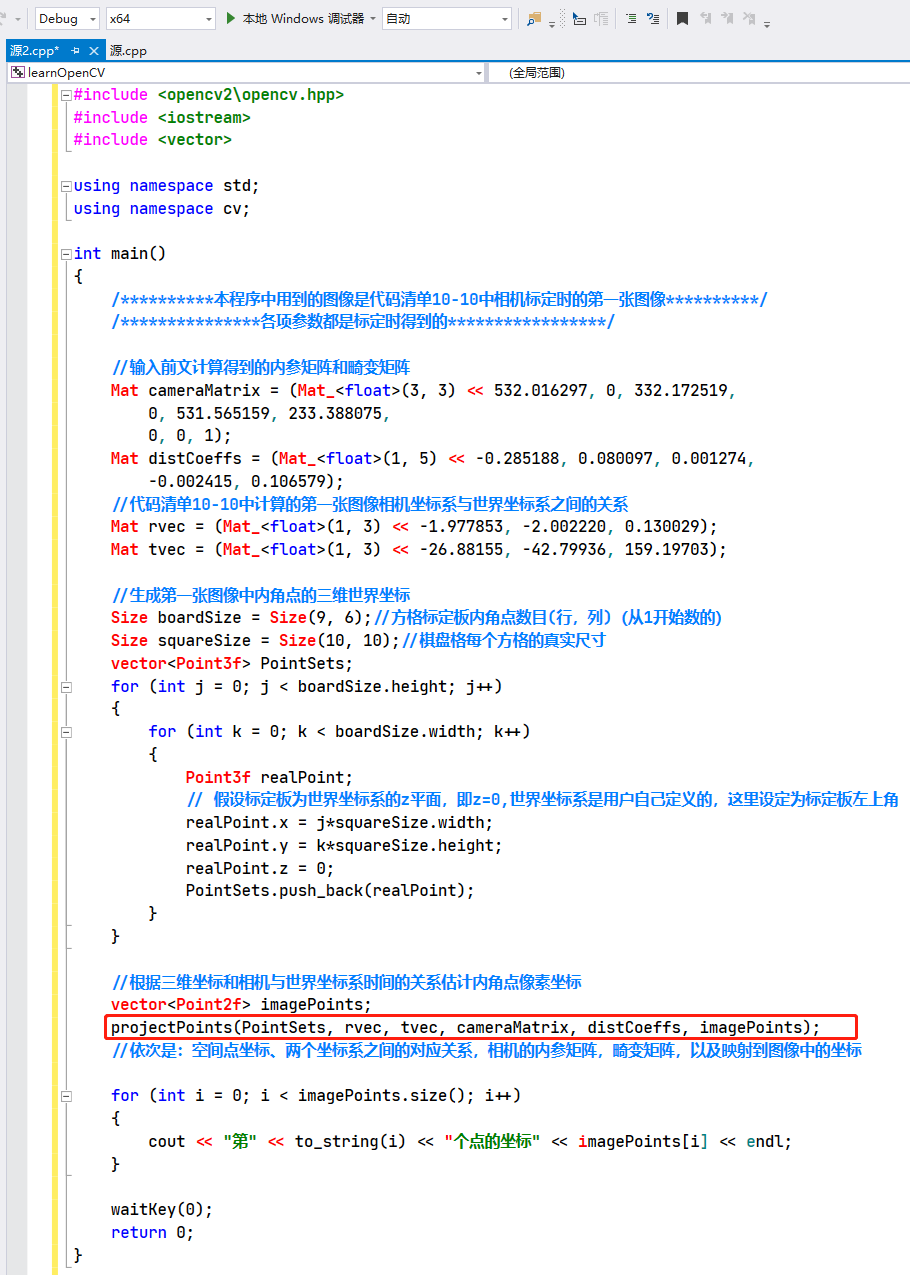
附上例代码:
#include <opencv2\opencv.hpp>
#include <iostream>
#include <vector>
using namespace std;
using namespace cv;
int main()
{
/**********本程序中用到的图像是代码清单10-10中相机标定时的第一张图像**********/
/***************各项参数都是标定时得到的*****************/
//输入前文计算得到的内参矩阵和畸变矩阵
Mat cameraMatrix = (Mat_<float>(3, 3) << 532.016297, 0, 332.172519,
0, 531.565159, 233.388075,
0, 0, 1);
Mat distCoeffs = (Mat_<float>(1, 5) << -0.285188, 0.080097, 0.001274,
-0.002415, 0.106579);
//代码清单10-10中计算的第一张图像相机坐标系与世界坐标系之间的关系
Mat rvec = (Mat_<float>(1, 3) << -1.977853, -2.002220, 0.130029);
Mat tvec = (Mat_<float>(1, 3) << -26.88155, -42.79936, 159.19703);
//生成第一张图像中内角点的三维世界坐标
Size boardSize = Size(9, 6);//方格标定板内角点数目(行,列)(从1开始数的)
Size squareSize = Size(10, 10);//棋盘格每个方格的真实尺寸
vector<Point3f> PointSets;
for (int j = 0; j < boardSize.height; j++)
{
for (int k = 0; k < boardSize.width; k++)
{
Point3f realPoint;
// 假设标定板为世界坐标系的z平面,即z=0,世界坐标系是用户自己定义的,这里设定为标定板左上角
realPoint.x = j*squareSize.width;
realPoint.y = k*squareSize.height;
realPoint.z = 0;
PointSets.push_back(realPoint);
}
}
//根据三维坐标和相机与世界坐标系时间的关系估计内角点像素坐标
vector<Point2f> imagePoints;
projectPoints(PointSets, rvec, tvec, cameraMatrix, distCoeffs, imagePoints);
//依次是:空间点坐标、两个坐标系之间的对应关系,相机的内参矩阵,畸变矩阵,以及映射到图像中的坐标
for (int i = 0; i < imagePoints.size(); i++)
{
cout << "第" << to_string(i) << "个点的坐标" << imagePoints[i] << endl;
}
waitKey(0);
return 0;
}