Realsense坐标转换
void D435::ConvertDpixel2Cpixel(float depth_pixel[2], float distance,
float rgb_pixel[2]) {
float depth_world[3];
float color_world[3];
rs2_deproject_pixel_to_point(depth_world, &depth_intrin_, depth_pixel,
distance);
rs2_transform_point_to_point(color_world, &depth2colorintrin_, depth_world);
rs2_project_point_to_pixel(rgb_pixel, &color_intrin_, color_world);
}
上面内参的获取
frames_ = pipe_.wait_for_frames();
dprofile_ = frames_.get_depth_frame().get_profile();
rs2::stream_profile cprofile = frames_.get_color_frame().get_profile();
depth_intrin_ =
rs2::video_stream_profile(dprofile_).get_intrinsics(); // 获取内参
color_intrin_ = rs2::video_stream_profile(cprofile).get_intrinsics();
// 获取深度相机相对于彩色相机的外参,即变换矩阵: P_color = R * P_depth + T
depth2colorintrin_ = dprofile_.get_extrinsics_to(cprofile);
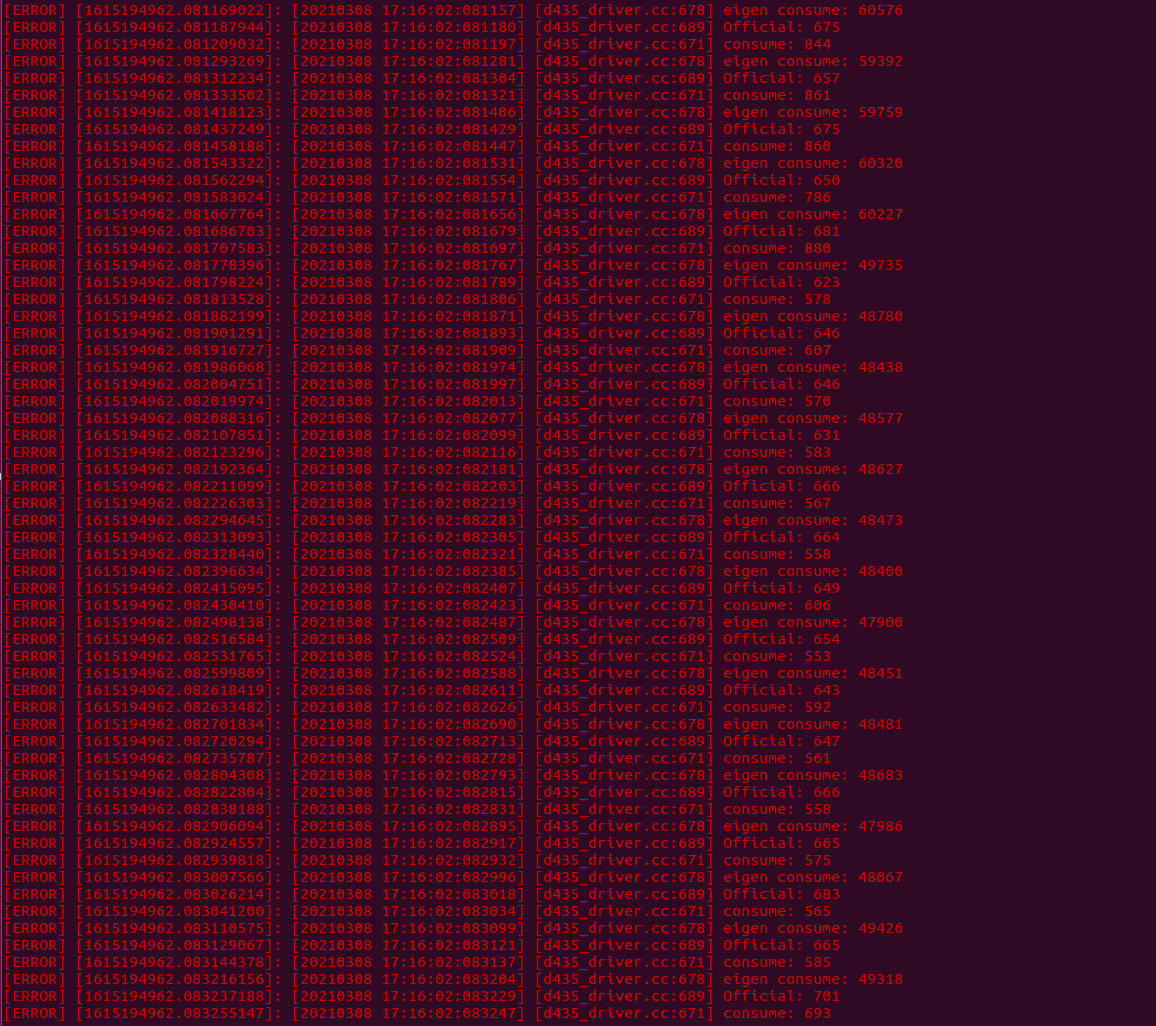
速度比较(ns)
eigen: 利用eigen库计算速度
consume: 正常公司推导速度
official : 官方Api速度