组合导航初始对准
概述
在GNSS/INS组合导航系统中,初始对准属于比较关键的一步,惯性导航系统只有给定初始值条件下才可以完成递推过程,因此第一个历元的初始状态的获得尤为关键。同时,由于GNSS可以方便的给出位置和速度(内插速度或者多普勒测速),因此初始对准的关键任务就落到了姿态的确定。因此,下面主要讨论初始姿态的确定。
静态对准
静态条件下,加计可以测量出重力值,根据重力值可以调平获得roll角和pitch角,由于该部分较为简单,不做赘述,直接给出示意图和公式:

注:图片来源于武汉大学牛小骥老师课程PPT
r o l l = s i g n ( f z ) s i n − 1 ( f y / g ) p i t c h = − s i g n ( f z ) s i n − 1 ( f x / g ) roll =sign(f_z)sin^{-1}(f_y/g) \\ pitch = -sign(f_z)sin^{-1}(f_x/g)\\ roll=sign(fz)sin−1(fy/g)pitch=−sign(fz)sin−1(fx/g)
相比于其他两个角,yaw角的获取相对较为麻烦。针对高等级惯性器件,陀螺可以敏感到地球自转,通过陀螺的测量地球自转在imu系下的投影来确定航向角:
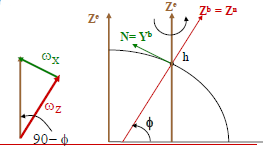
注:图片来源于武汉大学牛小骥老师课程PPT
y a w = a t a n − 1 ( − w x / w y ) yaw = atan^{-1}(-w_x/w_y) yaw=atan−1(−wx/wy)
如果希望实现静态精对准可以采用滤波器方式对上述进行滤波处理,可以获得更为准确的值。
然而实际使用条件下,高等级惯导设备成本太高(几万到几十万吧),低成本器件由于测量噪声会淹没地球自转测量值,无法确定yaw角。只能采用动对准方式,该方式则要求载体运动速度超过一定速度,例如5m/s。
动对准
动对准原理相对容易,对车辆载体比较有效,由于GNSS可以给出载体相对于当地水平坐标系(n系)的速度,通过速度在n系下投影,确定yaw和pitch角,示意图与公式如下:

p i t c h = tan − 1 ( − v D v N 2 + v E 2 ) y a w = tan − 1 ( v E v N ) pitch = { \tan^{-1}{\left( -v _D \over \sqrt{v_N^2 + v_E^2}\right)}} \\ yaw = { \tan^{-1}{\left(v_E \over v_N \right)}} pitch=tan−1(vN2+vE2−vD)yaw=tan−1(vNvE)
由于针对车辆载体,可以对roll直接赋值为0,同时给一个较大的初始方差,例如5度 [ 2 ] ^{[2]} [2]
最后
希望和组合导航/VIO方面的小伙伴一起交流
博客链接-组合导航/VIO交流学习
参考文献
[1]. 武汉大学牛小骥老师课程PPT
[2]. Shin and Eun-Hwan, Estimation techniques for low-cost inertial navigation. 2005.