《控制系统设计指南》 这本书中的仿真使用visual modeIQ做的。
在此对8A实验用matlab复原一下。如下图1所示。
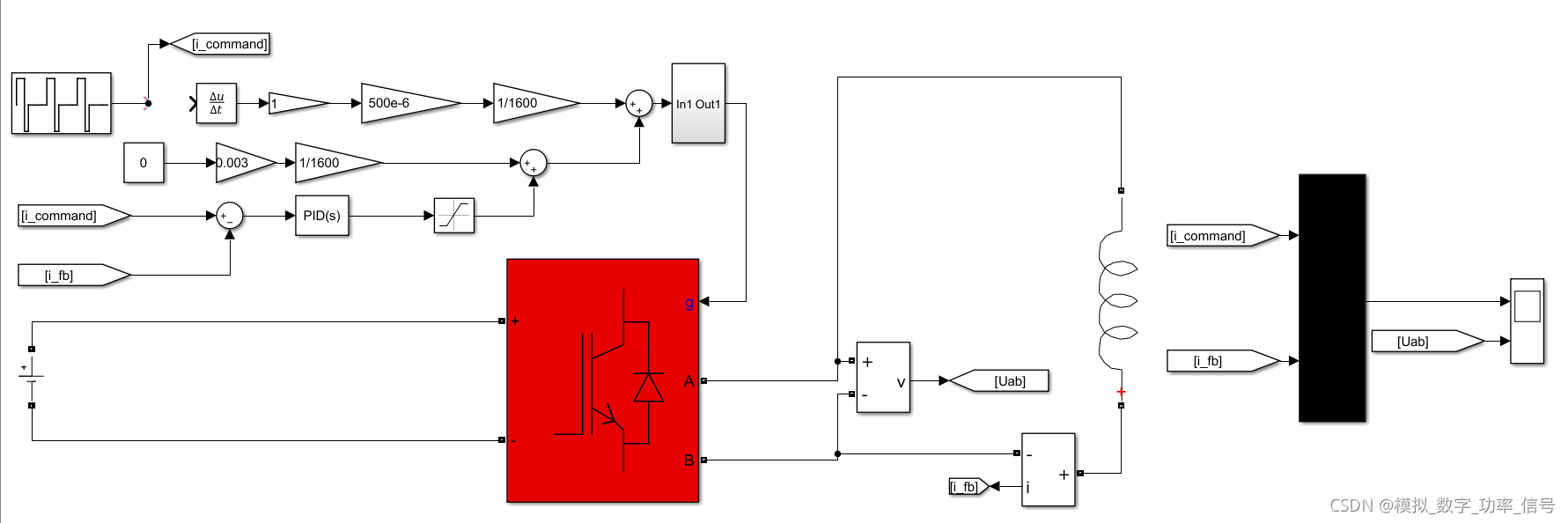
图1 理想电感电流负反馈控制
在8A实验中,控制对象是个积分器,本实验仿真用电感电流表示积分器,因为,电感电流等于其两端电压的积分除以L,1/L就是控制对象自身的增益G.
8A实验中用二阶低通滤波器代替功率变换器,这里我用真实的igbt全桥作为功率变换器。
图1首先仅仅通过负反馈,和PID调节器来实现电流闭环控制。波形如图2所示。
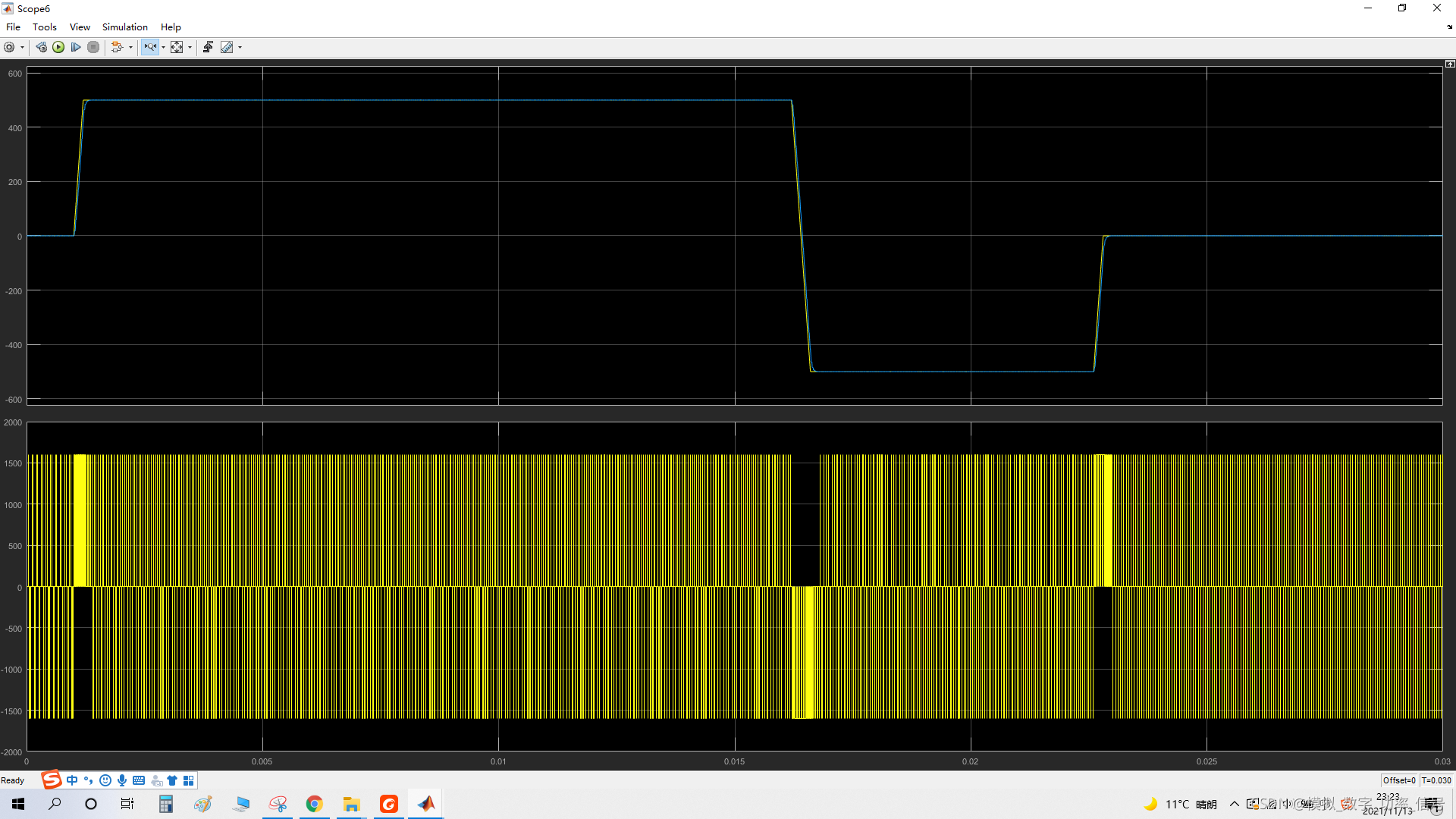
图2 纯负反馈PID控制波形图
图2中,黄色是指令波形,蓝色是电感电流,下面黄色是电感两端电压波形。
可以看到电流波形拐角处,并没有很好的跟踪指令波形。下面将基于控制对象的前馈环节加入前馈,进行仿真,如图3所示。
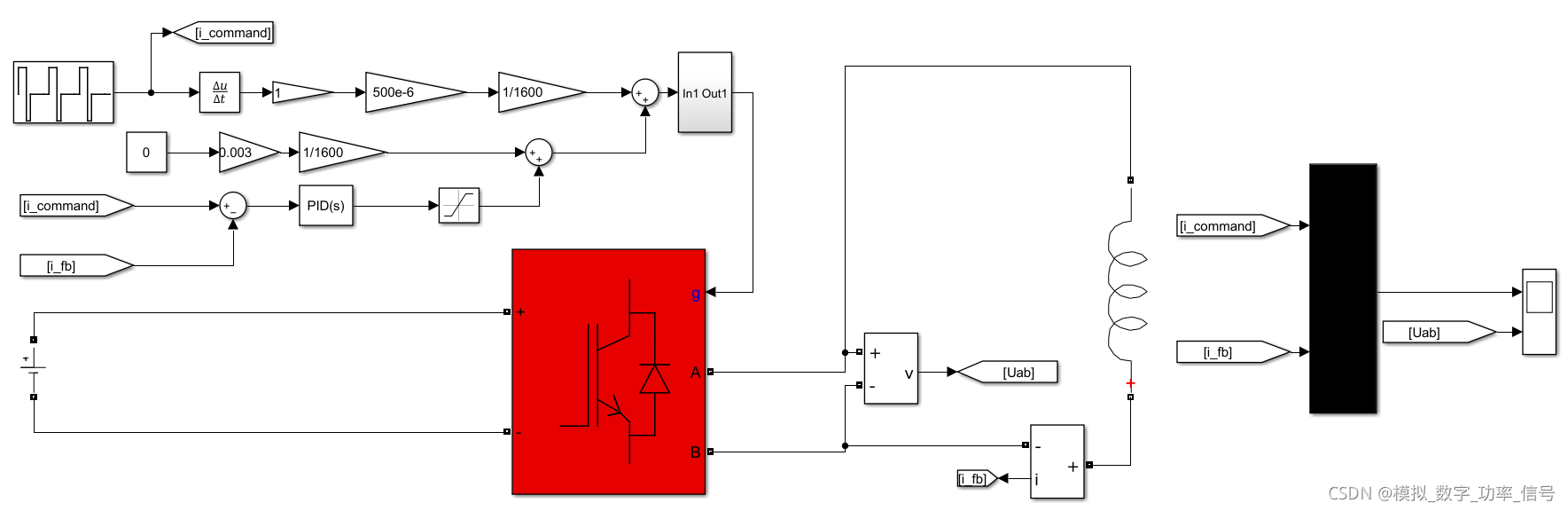
图3 增加基于控制对象的前馈控制
图3的波形如图4所示。

图4 图3的仿真波形
图4和图2对比,可以看出,图4上图的蓝色电流波形在拐角处很好的跟踪了指令。
将图2和图4拐角放大,如图5所示。
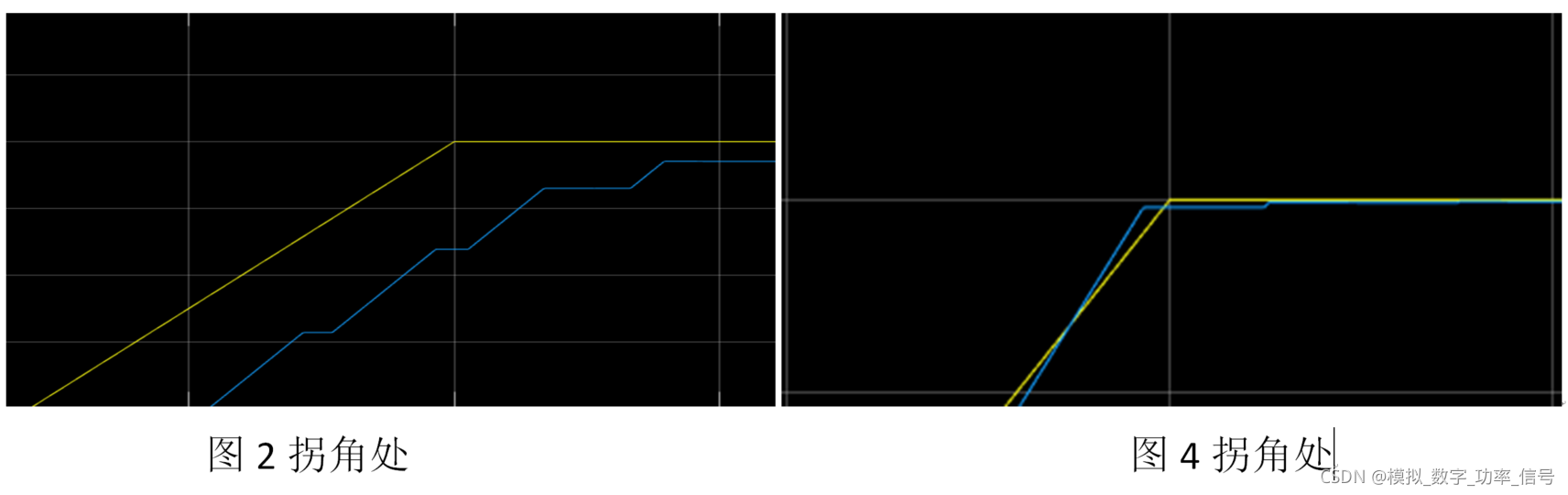
图5 拐角处跟踪情况对比
所以前馈确实能极大程度的增加电流环带宽,增加电流环的动态响应能力。