一、刷硬件
当你用micro数据线连接上pico时,(接线期间按住pico上的按钮,让pico进入写入状态,之后连线就不需要这一步了)pc端会显示出有一个128MB的硬盘,即会被识别为大容量存储设备,这时,需要到树莓派Pico中文官网下载一个UF2文件,可用micropython和C/C++语言进行环境安装
官网: 树莓派Pico中文官网.
注意:micropython和C/C++只能安装一种环境(作者这里安装的是micropython)
当你把UF2文件复制到那个设备里,复制好后,pico会自动重启,这时,到你电脑里设备管理器下,在端口里能看到新增的一个USB 串行设备,这说明你已经安装好了
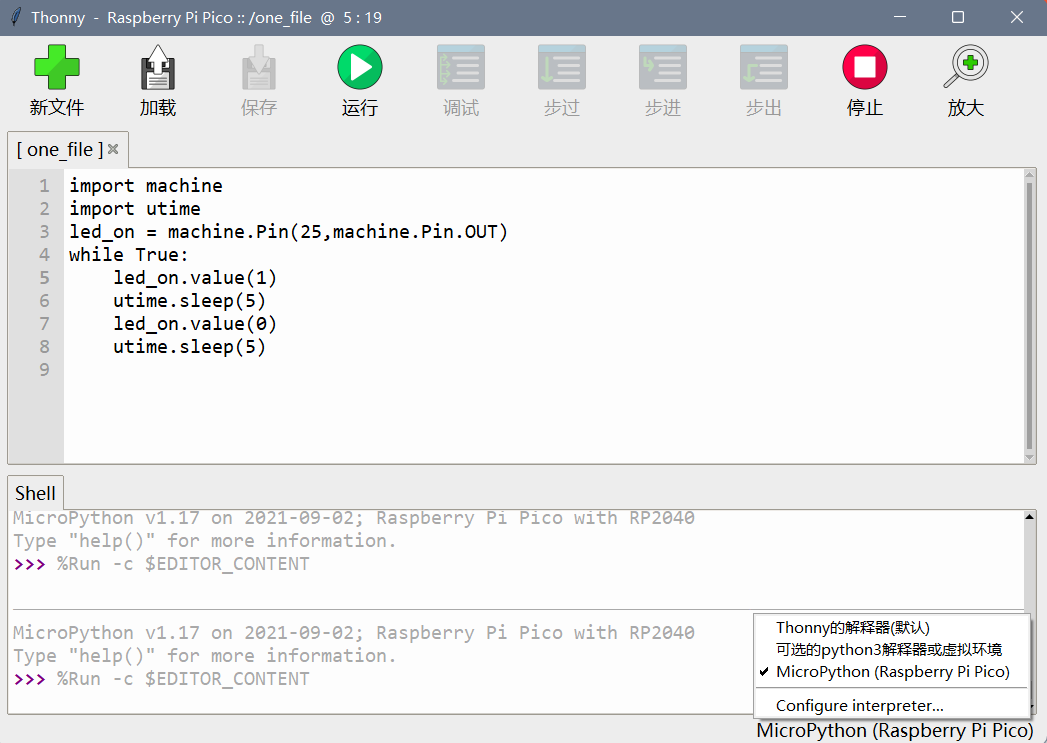
二、软件环境配置
作者使用的是(Windows下)Thonny IDE,可以到官方网址参考官网说讲解的方法安装。
Thonny官网
当你安装好后,对于解释器需要选择pico,如下图的右下角。即可
三、一些简单不需要额外的硬件设备的程序:
LED点亮:
import machine
import utime
led_onboard = machine.Pin(25, machine.Pin.OUT)
while True:
led_onboard.value(1)
utime.sleep(5)
led_onboard.value(0)
utime.sleep(5)
2.板载温度创读取
import machine
import utime
sensor_temp = machine.ADC(4)
conversion_factor = 3.3 / (65535)
while True:
reading = sensor_temp.read_u16() * conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
print(temperature)
utime.sleep(2)
3.蜂鸣器
import machine
import utime
buzzer = machine.Pin(15, machine.Pin.OUT)
while True:
for i in range(80):
buzzer.value(1)
utime.sleep(0.001)
buzzer.value(0)
utime.sleep(0.001)
for i in range(100):
buzzer.value(1)
utime.sleep(0.002)
buzzer.value(0)
utime.sleep(0.002)