 摘要:火星车,听起来好遥远,但在开源社区 GitHub 中,开发者雅各布 · 克兰茨(Jakob Krantz)给我们分享了一份全面的开源制作教程,引起不少人的关注。
摘要:火星车,听起来好遥远,但在开源社区 GitHub 中,开发者雅各布 · 克兰茨(Jakob Krantz)给我们分享了一份全面的开源制作教程,引起不少人的关注。
这款 3D 打印的移动机器人在原型设计上参考了美国宇航局的“好奇号” 火星车,它不仅可以在坑坑洼洼的沙地上顺畅行驶,摇臂转向架也高度模拟“好奇号”,环绕摄像头可以进行第一视角拍摄,而随着扩充配件,它也能够伸出机械臂抓取物体,开发者可以通过智能手机应用程序集成自定义控件和数据进行各种操控。
整个Fusion 360项目可在CAD文件夹中找到,下载.f3z文件,然后在桌面Fusion 360中打开它。
轮子有两个选择,一个是原始的好奇心样式轮子,可以一次打印。或将Mars 2020型车轮分为两部分进行印刷,而外部则可以采用柔性塑料(例如TPU)进行印刷。如果您的打印机可以在TPU中打印,则首选rover_2020_wheel_flex.f3d轮子,因为它们可以提供更大的抓地力。
克兰茨是一名嵌入式软件开发人员,他对DeepTech 表示:“当时制作这个项目并没有特定的原因和需求,只是对火星车的摇臂转向架移动方式非常感兴趣,于是想要搭建一个更大的项目,包含许多不同的零件、电子设备、编程和 CAD 设计,CAD 和一些相关设计都是自学的,断断续续建造了大约一年时间。”
看起来像一个玩具,但在硬件方面做好也没那么简单,除了要用 3D 打印车轮、车身和各种关键零部件,还需要准备以下配件清单:
这些BOM清单成本约为五六百美元, 但实际上,他本人可能已经花费了超过 1000 美元投入到这辆自制火星车上,包括一些已经迭代的零部件,以及一些损坏烧掉的电子设备。

有三种通信方式可以保持与这辆火星车的联系,通过移动流动站上的三向开关,可以选择启动模式。WiFi站+ LoRa,仅LoRa或WiFi AP,一旦有人连接到Websocket服务器或通过LoRa控制了Rover,Rover将自动发送远程信息处理数据。
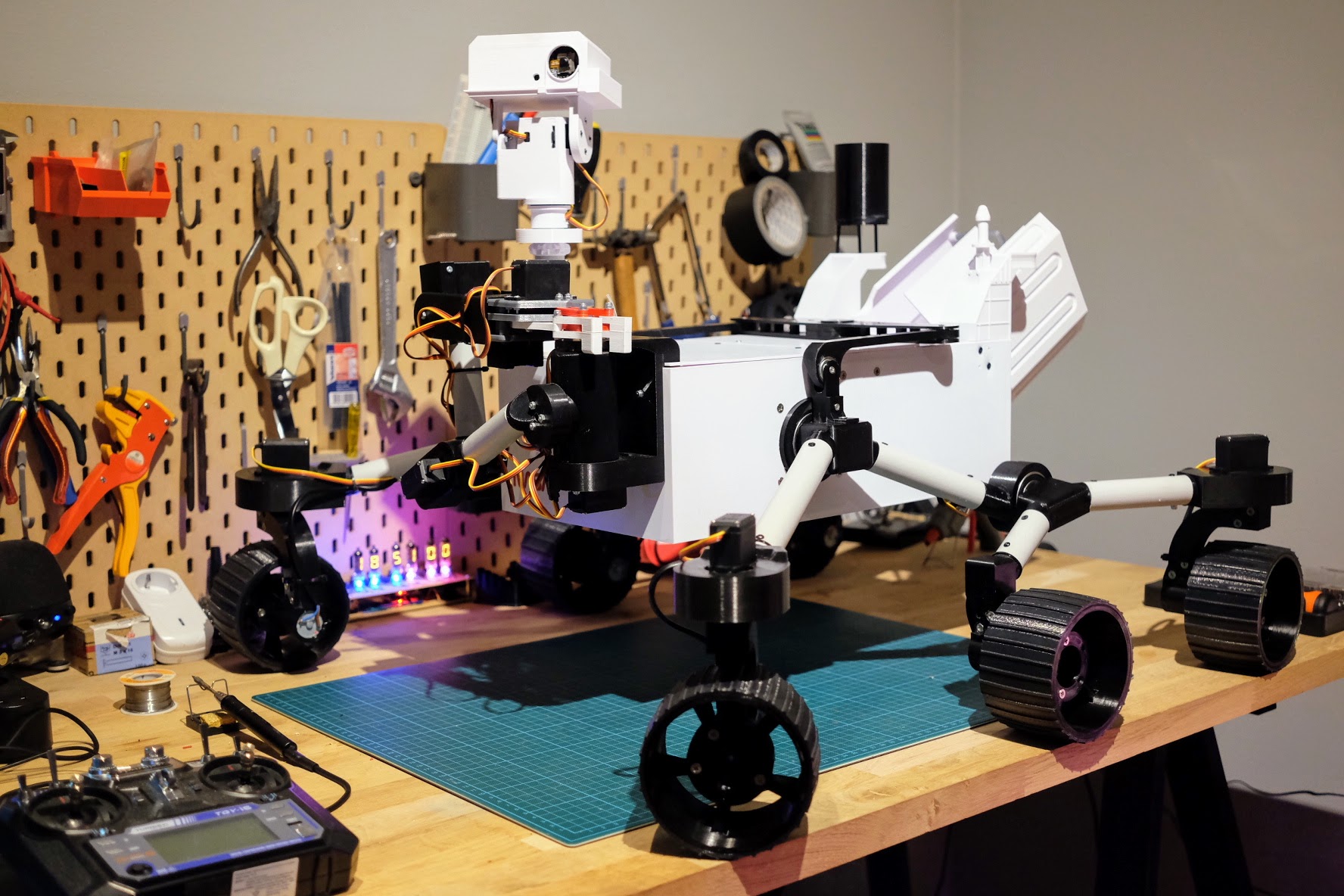
初步组装完成后的成品如下图所示,虽然功能可能有限,但气势上不会输,一台自制火星车闪亮登场。

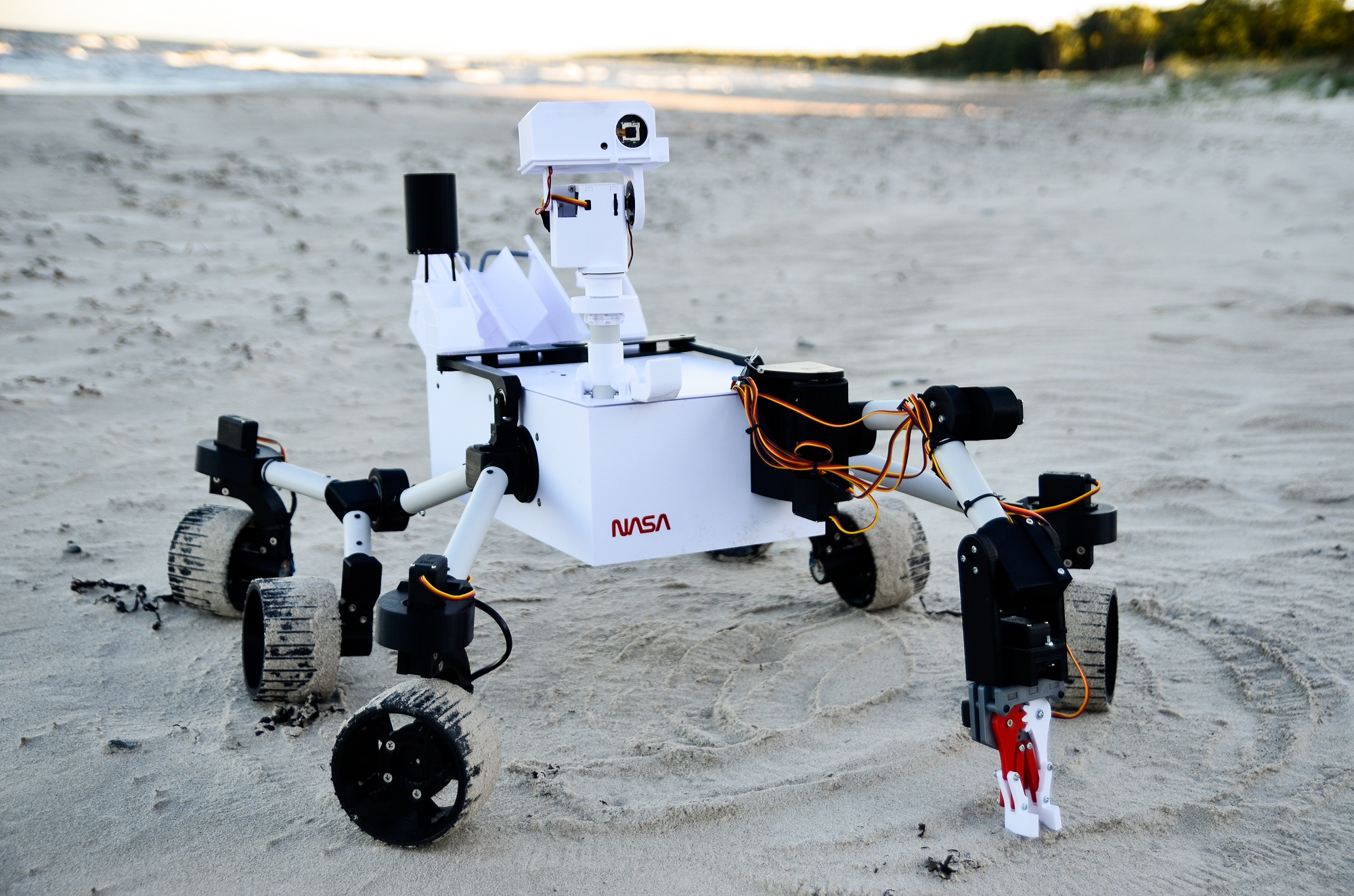 最后,就是实战环节,它的机械臂可以实现多关节控制,摇臂转向架系统能使其在起伏较大的沙滩上畅通无阻:
最后,就是实战环节,它的机械臂可以实现多关节控制,摇臂转向架系统能使其在起伏较大的沙滩上畅通无阻:
虽然小有所成,但作者表示,做这个项目暂时并没有太多商业化的想法,所有设计和代码目前都是开源的,项目仍需要进行大量调整才能使开放源代码版本更加完善,基于目前的基础平台,任何有经验的技术人员都可以进一步参与构建它,如果你对这个民间火星车感兴趣,或者想直接为这个开源项目做贡献,欢迎参考:
火星车:
https://github.com/jakkra/Mars-Rover
遥控器:
https://github.com/jakkra/RoverController
最后再放上几张美图:



