《动手学ROS2》10.3 SLAM技术概述
本系列教程作者:小鱼
公众号:鱼香ROS
QQ交流群:139707339
教学视频地址:小鱼的B站
完整文档地址:鱼香ROS官网
版权声明:如非允许禁止转载与商业用途。

10.3 SLAM技术概述
小伙伴们好,上一节我们搭建好了Gazebo中的仿真环境,本节课我们一起来了解一下SLAM技术。
第一节中我们知道,要解决机器人自主导航问题就需要有感知(建图和定位)参与,通过感知输出机器人当前环境的地图信息和位置。而本节要讲的SLAM就是解决地图和定位问题的。
1. SLAM是什么
SLAM是同步定位与地图构建(Simultaneous Localization And Mapping)的缩写。
先通过一个视频直观了解一下
视频中随着机器人的移动,机器人的传感器获取到了环境信息,然后完成对博物馆地图的构建。
有小伙伴可能会问,只看到建图没看到定位呀。细心观察可以发现建图的过程中,其实一直都在计算机器人的位置。
2. SLAM如何解决建图定位问题
机器人通过自身传感器数据处理进行位置估计,同时通过不断移动完成对整个未知环境的地图构建。这就是SLAM解决的问题。
那又是如何解决的呢?SLAM实现的方案很多,但是几个比较关键的技术如下:
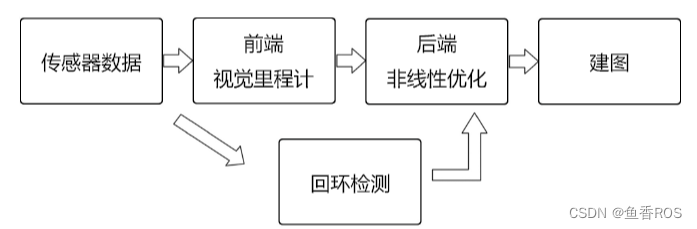
- 传感器感知 通过各类传感器实现对环境的感知,比如通过激光雷达获取环境的深度信息。同时可以通过传感器融合来提高位置估计的精度,比如融合轮式里程计、IMU、雷达、深度相机数据等。
- 视觉/激光里程计 基本原理是通过前后数据之间对比得出机器人位置的变化。
- 回环检测 判断机器人是否到达之前到过的位置,可以解决位置估计误差问题,建图时可以纠正地图误差。
经典视觉SLAM结构
3.SLAM算法分类
从算法的对数据的处理方式上看,目前常用的SLAM开源算法可以分为两类
1.基于滤波,比如扩展卡尔曼滤波(EKF: Extended Kalman Filter)、粒子滤波(PF: Particle Filter)等。
ROS中的gmapping、hector_slam算法都是基于滤波实现的。
2.基于图优化,先通过传感器进行构图,然后对图进行优化。
目前比较主流的是图优化的方法,Cartographer就是基于图优化实现的。图优化相对于滤波,不用实时的进行计算,效率更高,消耗的资源更少,所以在实际场景中使用的更多。
4.SLAM开源库
4.1. Cartographer
github地址:https://github.com/cartographer-project/cartographer
Cartographer是一个可跨多个平台和传感器配置以2D和3D形式提供实时同时定位和建图(SLAM)的系统。
4.2. ORB_SLAM2(纯视觉)
github地址:https://github.com/raulmur/ORB_SLAM2
ORB-SLAM2是用于单目,双目和RGB-D相机的实时SLAM库,用于计算相机轨迹和稀疏3D重建
4.3 VINS
github地址:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
VINS-Mono是单目视觉惯性系统的实时SLAM框架。它使用基于优化的滑动窗口配方来提供高精度的视觉惯性测距。
5.总结
本节课我们简单介绍了下感知部分的技术担当SLAM,并对常用的开源库进行介绍,下一节我们就对其中的Cartograpger开源库进行介绍和安装。
参考文章:
技术交流&&问题求助:
- 微信公众号及交流群:鱼香ROS
- 小鱼微信:AiIotRobot
- QQ交流群:139707339
- 版权保护:已加入“维权骑士”(rightknights.com)的版权保护计划