目录
5.1 三维建模技术
虚拟环境建模的目的是设计出反映研究对象真实有效模型。三维建模一般主要是三维视觉建模。三维视觉建模可分为几何建模、物理建模、行为建模。
5.1.1 几何建模技术
虚拟环境中的几何模型是物体几何信息的表示。几何建模技术是用计算机表达对象信息的技术。设计包括表示几何信息的数据结构、相关的构造与操纵该数据结构的算法。虚拟环境中的每个物体包含形状和外观两个方面。
两种实现方法:
(1)人工的几何建模方法 :利用虚拟现实工具软件编程进行建模,利用建模软件建模
(2)自动的几何建模方法:利用三维扫描仪对实际物体进行三维扫描
5.1.2 物理建模技术
物理建模指的是虚拟对象的质量、重量、惯性、表面纹理、硬度、变形模式等特征的建模。分形技术和粒子系统就是典型的物理建模方法。
5.1.3 行为建模技术
虚拟现实的本质就是客观世界的仿真或折射,虚拟现实的模型则是客观世界中物体或对象的代表。而客观世界中的物体或对象除了具有表观特征如外形、质感以外,还具有一定的行为能力,并且服从一定的客观规律。
5.2 立体显示技术
立体显示技术使人在虚拟世界里具有更强的沉浸感。目前比较有代表性的技术有:分色技术、分光技术、分时技术、光栅技术、全息显示技术。
5.2.1 双目视差显示技术
人两眼有 4 - 6cm的距离,所以实际上看物体时两只眼睛中的图像是有差别的。两幅不同图像输送到大脑后,看到的是有景深的图像。这就是计算机和投影系统的立体成像原理。
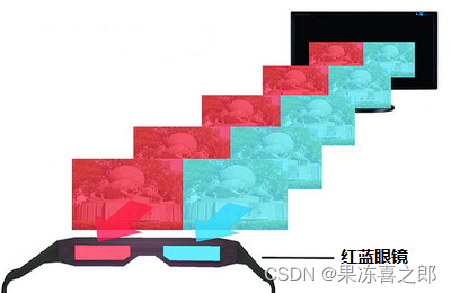
| 分色技术 | 分色技术的基本原理是让某些颜色的光只进入左眼,另一部分只进入右眼。 |
 |
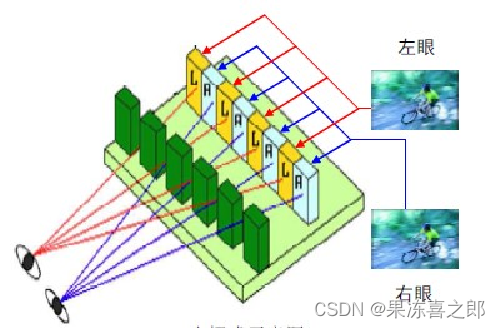
| 分光技术 | 分光技术的基本原理是当观众戴上特制的偏光眼镜时,由于左、右两片偏光镜的偏振轴互相垂直,并与放映镜头前的偏振轴相一致;致使观众的左眼只能看到左像、右眼只能看到右像,通过双眼汇聚功能将左、右像叠合在视网膜上,由大脑神经产生三维立体的视觉效果。 |
 |
| 分时技术 | 分时技术是将两套画面在不同的时间播放,显示器在第一次刷新时播放左眼画面,同时用专用的眼镜遮住观看者的右眼,下一次刷新时播放右眼画面,并遮住观看者的左眼。按照上述方法将两套画面以极快的速度切换,在人眼视觉暂留特性的作用下就合成了连续的画面。 |
 |
| 光栅技术 | 在显示器前端加上光栅,光栅的功能是要挡光,让左眼透过光栅时只能看到部分的画面;右眼也只能看到另外一半的画面,于是就能让左右眼看到不同影像并形成立体,此时无需佩戴眼镜。 |
 |
5.2.2 全息技术
全息技术第一步是利用干涉原理记录物体光波信息,记录着干涉条纹的底片经过显影、定影等处理程序后,便成为一张全息图,或称全息照片;其第二步是利用衍射原理再现物体光波信息。再现的图像立体感强,具有真实的视觉效应。
5.3 真实感实时绘制技术
5.3.1 真实感绘制技术
真实感绘制是在计算机中重现真实世界场景的过程。主要任务是模拟真实物体的物理属性。当用户视点发生变化时,所看到的场景需要及时更新。
常用方法:
(1)纹理映射 (2)环境映射 (3)反走样
5.3.2 图形的实时绘制技术
传统的虚拟场景基本上都是基于几何的,就是用数学意义上的曲线、曲面等数学模型预先定义好虚拟场景的几何轮廓,再采用纹理映射、光照等数学模型加以渲染。
图形的实时绘制技术是在当前图形算法和硬件条件限制下提出的在一定时间内完成的技术。
除了在硬件方面采用高性能的计算机,提高计算机的运行速度以提高图形显示能力外,还可以降低场景的复杂度。
5.5 人机交互技术
5.5.1 手势识别
手势识别系统的输入设备主要分为基于数据手套的识别和基于视觉(图像)的识别系统两种。
5.5.2 面部表情识别
人脸图像的分割、主要特征(如眼睛、鼻子等)定位以及识别是这个技术的主要难点。人脸检测法可分为两类:(1)基于特征的人脸检测 (2)基于图像的人脸检测
5.5.3 眼动跟踪
眼动跟踪技术的基本工作原理是利用图像处理技术,使用能锁定眼睛的特殊摄像机。通过摄入从人的眼角膜和瞳孔反射的红外线连续地记录视线变化,从而达到记录、分析视线追踪过程的目的。

5.5.4 语音识别技术
语音识别技术(Automatic Speech Recognition,简称ASR)是将人说话的语音信号转换为可被计算机程序所识别的文字信息,从而识别说话者的语音指令以及文字内容的技术,包括参数提取、参考模式建立和模式识别等过程。
语音识别方法主要是模式匹配法:
(1)在训练阶段,用户将词汇表中的每一词依次说一遍,并且将其特征矢量作为模板存入模板库。
(2)在识别阶段,将输入语音的特征矢量依次与模板库中的每个模板进行相似度比较,将相似度最高者作为识别结果输出。
5.6 碰撞检测技术
碰撞检测经常用来检测对象甲是否与对象乙相互作用。为保证虚拟世界的真实性,就需要虚拟现实系统能够及时检测出这些碰撞,产生相应的碰撞反应,并及时更新场景输出,否则就会发生穿透现象。
注:读书笔记摘自《虚拟现实与增强现实技术概论》