一、互斥量的概念
互斥量又称互斥信号量(本质是信号量),是一种特殊的二值信号量,它和信号量不 同的是,它支持互斥量所有权、递归访问以及防止优先级翻转的特性,用于实现对临界资源的独占式处理。
1、优先级继承机制:指暂时提高某个占有某种资源的低优先级任务的优先级,使之与在所有等待该资源的任务中优先级最高那个任务的优先级相等,而当这个低优先级任务执行完毕释放该资源时,优先级重新回到初始设定值。继承优先级的任务避免了系统资源被任何中间优先级的任务抢占。

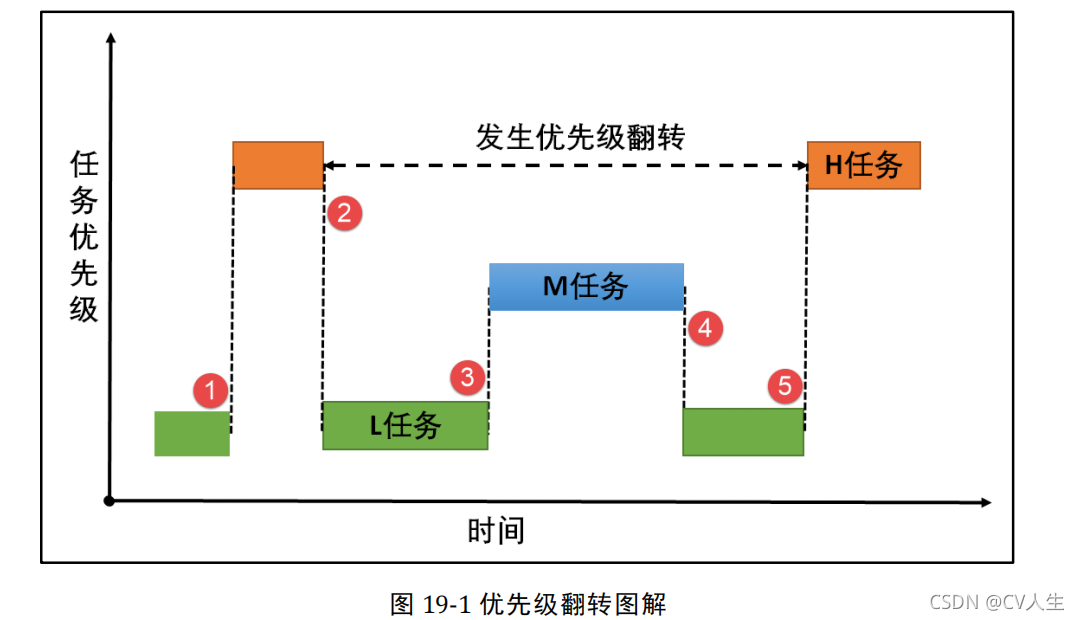
2、优先级翻转:我们知道任务的优先级在创建的时候就已经是设置好的,高优先级的任务可以打断低优先级的任务,抢占 CPU 的使用权。但是在很多场合中,某些资源只有一个,当低优先级任务正在占用该资源的时候,即便高优先级任务也只能乖乖的等待低优先级任务使用完该资源后释放资源。这里高优先级任务无法运行而低优先级任务可以运行的现象称为“优先级翻转”。
3、关于互斥量优先级继承的范例
有两个任务需要对串口进行发送数据,其硬件资源只有一个,那么两个任务肯定不能同时发送啦,不然导致数据错误,那么,就可以用互斥量对串口资源进行保护,当一个任务正在使用串口的时候,另一个任务则无法使用串口,等到任务使用串口完毕之后, 另外一个任务才能获得串口的使用权。 另外需要注意的是互斥量不能在中断服务函数中使用,因为其特有的优先级继承机制只在任务起作用,在中断的上下文环境毫无意义。
二、常用的任务函数。(更详细的用法以及函数源码可以参考《FreeRTOS 内核实现与应用开发实战指南 》)
|
xSemaphoreCreateMutex()
|
用于创建一个互斥量,并返回一个互斥量句柄。
|
|
xSemaphoreCreateRecursiveMutex()
|
创建一个递归互斥量,返回一个递归互斥量句柄。
|
|
vSemaphoreDelete()
|
互斥量的本质是信号量,直接调用
vSemaphoreDelete()
函数进行删除。
|
|
xSemaphoreTake()
|
互斥量获取函数。
|
|
xSemaphoreTakeRecursive()
|
是一个用于获取递归互斥量的宏,与互斥量的获取函数一
样。
|
|
xSemaphoreGive()
|
互斥量释放函数。
|
|
xSemaphoreGiveRecursive()
|
是一个用于释放递归互斥量的宏。
|
三、实验代码
优先级翻转(二值信号量)
扫描二维码关注公众号,回复:
14335130 查看本文章

/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LowPriority_Task_Handle = NULL;/* LowPriority_Task任务句柄 */
static TaskHandle_t MidPriority_Task_Handle = NULL;/* MidPriority_Task任务句柄 */
static TaskHandle_t HighPriority_Task_Handle = NULL;/* HighPriority_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
SemaphoreHandle_t BinarySem_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LowPriority_Task(void* pvParameters);/* LowPriority_Task任务实现 */
static void MidPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void HighPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS优先级翻转实验!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建Test_Queue */
BinarySem_Handle = xSemaphoreCreateBinary();
if(NULL != BinarySem_Handle)
printf("BinarySem_Handle二值信号量创建成功!\r\n");
xReturn = xSemaphoreGive( BinarySem_Handle );//给出二值信号量
// if( xReturn == pdTRUE )
// printf("释放信号量!\r\n");
/* 创建LowPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LowPriority_Task, /* 任务入口函数 */
(const char* )"LowPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LowPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LowPriority_Task任务成功!\r\n");
/* 创建MidPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )MidPriority_Task, /* 任务入口函数 */
(const char* )"MidPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&MidPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建MidPriority_Task任务成功!\n");
/* 创建HighPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )HighPriority_Task, /* 任务入口函数 */
(const char* )"HighPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&HighPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建HighPriority_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LowPriority_Task
* @ 功能说明: LowPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LowPriority_Task(void* parameter)
{
static uint32_t i;
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("LowPriority_Task 获取信号量\n");
//获取二值信号量 xSemaphore,没获取到则一直等待
xReturn = xSemaphoreTake(BinarySem_Handle,/* 二值信号量句柄 */
portMAX_DELAY); /* 等待时间 */
if( xReturn == pdTRUE )
printf("LowPriority_Task Running\n\n");
for(i=0;i<2000000;i++)//模拟低优先级任务占用信号量
{
taskYIELD();//发起任务调度
}
printf("LowPriority_Task 释放信号量!\r\n");
xReturn = xSemaphoreGive( BinarySem_Handle );//给出二值信号量
// if( xReturn == pdTRUE )
// ; /* 什么都不做 */
LED1_TOGGLE;
vTaskDelay(500);
}
}
/**********************************************************************
* @ 函数名 : MidPriority_Task
* @ 功能说明: MidPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void MidPriority_Task(void* parameter)
{
while (1)
{
printf("MidPriority_Task Running\n");
vTaskDelay(500);
}
}
/**********************************************************************
* @ 函数名 : HighPriority_Task
* @ 功能说明: HighPriority_Task 任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void HighPriority_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("HighPriority_Task 获取信号量\n");
//获取二值信号量 xSemaphore,没获取到则一直等待
xReturn = xSemaphoreTake(BinarySem_Handle,/* 二值信号量句柄 */
portMAX_DELAY); /* 等待时间 */
if(pdTRUE == xReturn)
printf("HighPriority_Task Running\n");
LED1_TOGGLE;
xReturn = xSemaphoreGive( BinarySem_Handle );//给出二值信号量
if( xReturn == pdTRUE )
printf("HighPriority_Task 释放信号量!\r\n");
vTaskDelay(500);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}优先级继承(互斥量)
/*
*************************************************************************
* 包含的头文件
*************************************************************************
*/
/* FreeRTOS头文件 */
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
/* 开发板硬件bsp头文件 */
#include "bsp_led.h"
#include "bsp_usart.h"
#include "bsp_key.h"
/**************************** 任务句柄 ********************************/
/*
* 任务句柄是一个指针,用于指向一个任务,当任务创建好之后,它就具有了一个任务句柄
* 以后我们要想操作这个任务都需要通过这个任务句柄,如果是自身的任务操作自己,那么
* 这个句柄可以为NULL。
*/
static TaskHandle_t AppTaskCreate_Handle = NULL;/* 创建任务句柄 */
static TaskHandle_t LowPriority_Task_Handle = NULL;/* LowPriority_Task任务句柄 */
static TaskHandle_t MidPriority_Task_Handle = NULL;/* MidPriority_Task任务句柄 */
static TaskHandle_t HighPriority_Task_Handle = NULL;/* HighPriority_Task任务句柄 */
/********************************** 内核对象句柄 *********************************/
/*
* 信号量,消息队列,事件标志组,软件定时器这些都属于内核的对象,要想使用这些内核
* 对象,必须先创建,创建成功之后会返回一个相应的句柄。实际上就是一个指针,后续我
* 们就可以通过这个句柄操作这些内核对象。
*
* 内核对象说白了就是一种全局的数据结构,通过这些数据结构我们可以实现任务间的通信,
* 任务间的事件同步等各种功能。至于这些功能的实现我们是通过调用这些内核对象的函数
* 来完成的
*
*/
SemaphoreHandle_t MuxSem_Handle =NULL;
/******************************* 全局变量声明 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些全局变量。
*/
/******************************* 宏定义 ************************************/
/*
* 当我们在写应用程序的时候,可能需要用到一些宏定义。
*/
/*
*************************************************************************
* 函数声明
*************************************************************************
*/
static void AppTaskCreate(void);/* 用于创建任务 */
static void LowPriority_Task(void* pvParameters);/* LowPriority_Task任务实现 */
static void MidPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void HighPriority_Task(void* pvParameters);/* MidPriority_Task任务实现 */
static void BSP_Init(void);/* 用于初始化板载相关资源 */
/*****************************************************************
* @brief 主函数
* @param 无
* @retval 无
* @note 第一步:开发板硬件初始化
第二步:创建APP应用任务
第三步:启动FreeRTOS,开始多任务调度
****************************************************************/
int main(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
/* 开发板硬件初始化 */
BSP_Init();
printf("这是一个[野火]-STM32全系列开发板-FreeRTOS互斥量实验!\n");
/* 创建AppTaskCreate任务 */
xReturn = xTaskCreate((TaskFunction_t )AppTaskCreate, /* 任务入口函数 */
(const char* )"AppTaskCreate",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )1, /* 任务的优先级 */
(TaskHandle_t* )&AppTaskCreate_Handle);/* 任务控制块指针 */
/* 启动任务调度 */
if(pdPASS == xReturn)
vTaskStartScheduler(); /* 启动任务,开启调度 */
else
return -1;
while(1); /* 正常不会执行到这里 */
}
/***********************************************************************
* @ 函数名 : AppTaskCreate
* @ 功能说明: 为了方便管理,所有的任务创建函数都放在这个函数里面
* @ 参数 : 无
* @ 返回值 : 无
**********************************************************************/
static void AppTaskCreate(void)
{
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
taskENTER_CRITICAL(); //进入临界区
/* 创建MuxSem */
MuxSem_Handle = xSemaphoreCreateMutex();
if(NULL != MuxSem_Handle)
printf("MuxSem_Handle互斥量创建成功!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
// if( xReturn == pdTRUE )
// printf("释放信号量!\r\n");
/* 创建LowPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )LowPriority_Task, /* 任务入口函数 */
(const char* )"LowPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL, /* 任务入口函数参数 */
(UBaseType_t )2, /* 任务的优先级 */
(TaskHandle_t* )&LowPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建LowPriority_Task任务成功!\r\n");
/* 创建MidPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )MidPriority_Task, /* 任务入口函数 */
(const char* )"MidPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )3, /* 任务的优先级 */
(TaskHandle_t* )&MidPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建MidPriority_Task任务成功!\n");
/* 创建HighPriority_Task任务 */
xReturn = xTaskCreate((TaskFunction_t )HighPriority_Task, /* 任务入口函数 */
(const char* )"HighPriority_Task",/* 任务名字 */
(uint16_t )512, /* 任务栈大小 */
(void* )NULL,/* 任务入口函数参数 */
(UBaseType_t )4, /* 任务的优先级 */
(TaskHandle_t* )&HighPriority_Task_Handle);/* 任务控制块指针 */
if(pdPASS == xReturn)
printf("创建HighPriority_Task任务成功!\n\n");
vTaskDelete(AppTaskCreate_Handle); //删除AppTaskCreate任务
taskEXIT_CRITICAL(); //退出临界区
}
/**********************************************************************
* @ 函数名 : LowPriority_Task
* @ 功能说明: LowPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void LowPriority_Task(void* parameter)
{
static uint32_t i;
BaseType_t xReturn = pdPASS;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("LowPriority_Task 获取互斥量\n");
//获取互斥量 MuxSem,没获取到则一直等待
xReturn = xSemaphoreTake(MuxSem_Handle,/* 互斥量句柄 */
portMAX_DELAY); /* 等待时间 */
if(pdTRUE == xReturn)
printf("LowPriority_Task Running\n\n");
for(i=0;i<2000000;i++)//模拟低优先级任务占用互斥量
{
taskYIELD();//发起任务调度
}
printf("LowPriority_Task 释放互斥量!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
LED1_TOGGLE;
vTaskDelay(1000);
}
}
/**********************************************************************
* @ 函数名 : MidPriority_Task
* @ 功能说明: MidPriority_Task任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void MidPriority_Task(void* parameter)
{
while (1)
{
printf("MidPriority_Task Running\n");
vTaskDelay(1000);
}
}
/**********************************************************************
* @ 函数名 : HighPriority_Task
* @ 功能说明: HighPriority_Task 任务主体
* @ 参数 :
* @ 返回值 : 无
********************************************************************/
static void HighPriority_Task(void* parameter)
{
BaseType_t xReturn = pdTRUE;/* 定义一个创建信息返回值,默认为pdPASS */
while (1)
{
printf("HighPriority_Task 获取互斥量\n");
//获取互斥量 MuxSem,没获取到则一直等待
xReturn = xSemaphoreTake(MuxSem_Handle,/* 互斥量句柄 */
portMAX_DELAY); /* 等待时间 */
if(pdTRUE == xReturn)
printf("HighPriority_Task Running\n");
LED1_TOGGLE;
printf("HighPriority_Task 释放互斥量!\r\n");
xReturn = xSemaphoreGive( MuxSem_Handle );//给出互斥量
vTaskDelay(1000);
}
}
/***********************************************************************
* @ 函数名 : BSP_Init
* @ 功能说明: 板级外设初始化,所有板子上的初始化均可放在这个函数里面
* @ 参数 :
* @ 返回值 : 无
*********************************************************************/
static void BSP_Init(void)
{
/*
* STM32中断优先级分组为4,即4bit都用来表示抢占优先级,范围为:0~15
* 优先级分组只需要分组一次即可,以后如果有其他的任务需要用到中断,
* 都统一用这个优先级分组,千万不要再分组,切忌。
*/
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_4 );
/* LED 初始化 */
LED_GPIO_Config();
/* 串口初始化 */
USART_Config();
/* 按键初始化 */
Key_GPIO_Config();
}