一、三维数据的表示方法
三维数据的表述形式一般分为四种:
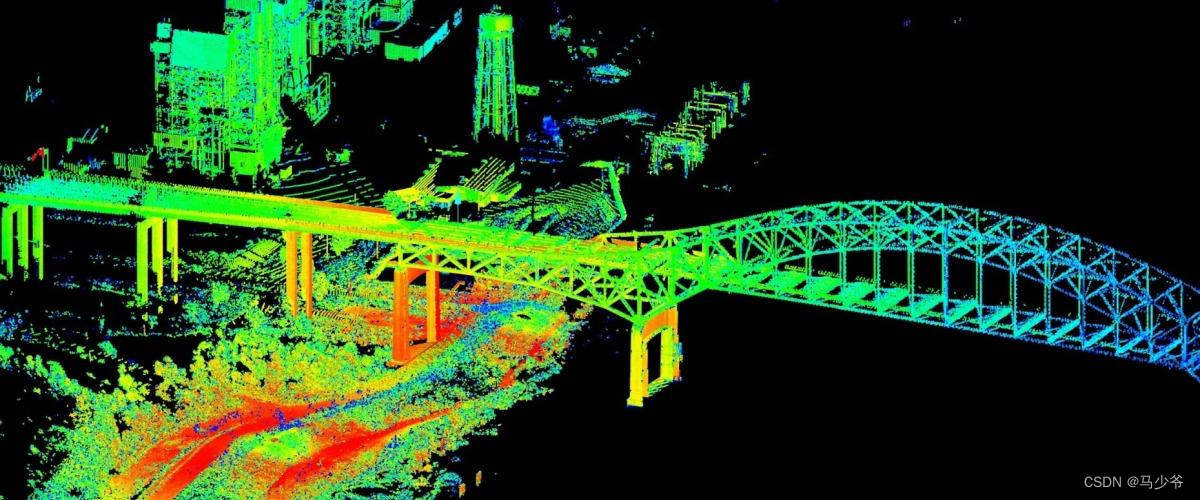
① 点云:由N 个D 维的点组成,当这个D = 3 的时候一般代表着( x , y , z ) 的坐标,当然也可以包括一些法向量、强度等别的特征。这是今天主要讲述的数据类型。
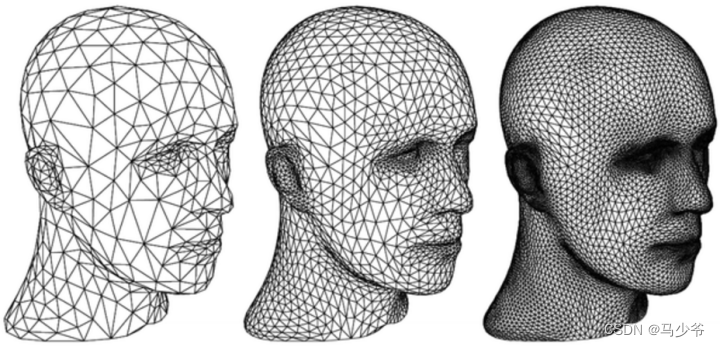
② Mesh:由三角面片和正方形面片组成。
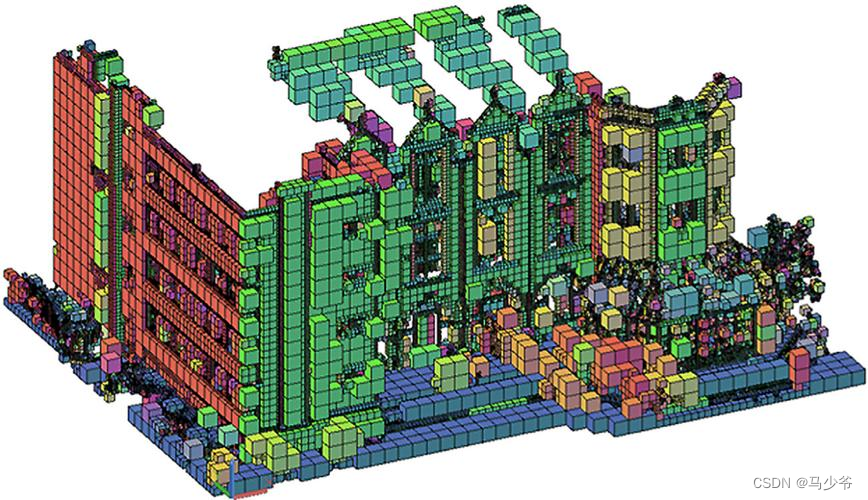
③ 体素:由三维栅格将物体用0和1表征。
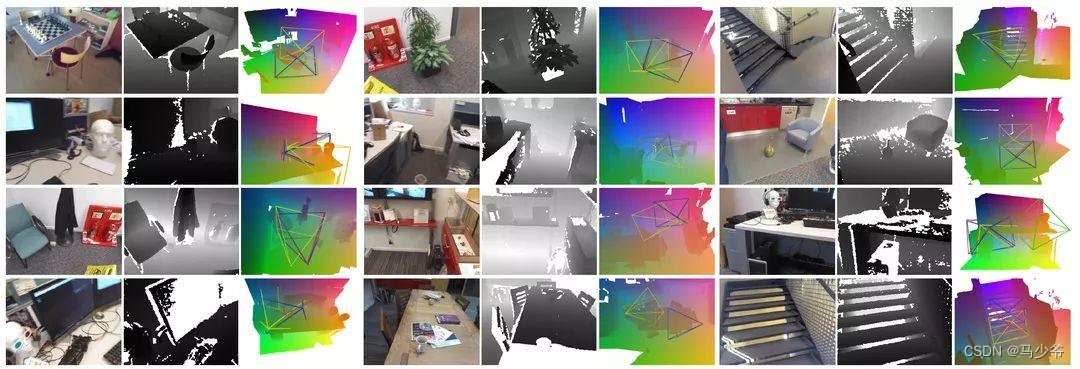
④ 多角度的RGB图像或者RGB-D图像
而又由于点云更接近于设备的原始表征(即雷达扫描物体直接产生点云)同时它的表达方式更加简单,一个物体仅用一个N × D 的矩阵表示,所以点云成为了众多三维数据表示方法中最重要的一种。在测绘、建筑、电力、工业甚至如今最热门的自动驾驶等领域均有广泛的应用。
二、点云分割数据集处理
我们的点云数据可能与模型需要的数据不符,所以需要自己编写脚本进行数据的规范化。标准的点云数据处理的格式如下:
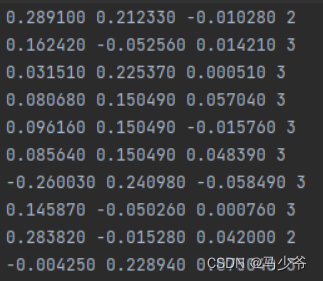
其只包含了点云的(x,y,z)坐标以及每个点对应的标签。而可能我们从CloudCompare中导出的数据有四列数据还有一列点云的强度信息:
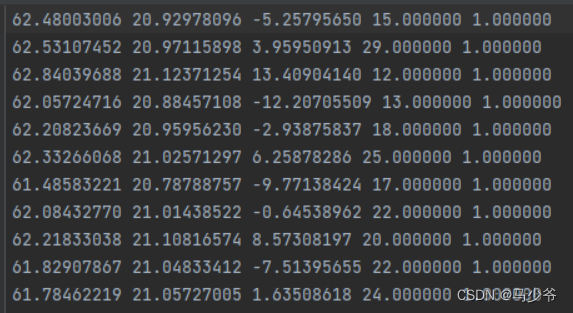
所以编写如下的脚本对多余的第四列数据进行去除(文件的具体路径自己设置):
# -*- coding:utf-8 -*-
import os
filePath = 'D:\\点云数据处理小组\\pointnet-my\\data\\shapenetcore_partanno_segmentation_benchmark_v0_normal\\03797390'
for i,j,k in os.walk(filePath):
for name in k:
print(name)
f = open(filePath+name) # 打开txt文件
line = f.readline() # 以行的形式进行读取文件
list1 = []
while line:
a = line.split()
b = a[0:3]
c = float(a[-1])
print(c)
if(float(a[-1])==36.0):
c=2
if(float(a[-1])==37.0):
c=3
b.append(c)
list1.append(b) # 将其添加在列表之中
line = f.readline()
f.close()
print(list1)
with open(filePath+name, 'w+') as file:
for i in list1:
file.write(str(i[0]))
file.write(' '+str(i[1]))
file.write(' ' + str(i[2]))
file.write(' ' + str(i[3]))
if(i!=list[-1]):
file.write('\n')
file.close()
# path_out = 'test.txt' # 新的txt文件
# with open(path_out, 'w+') as f_out:
# for i in list1:
# fir = '9443_' + i[0] # 第一列加前缀'9443_'
# sec = 9443 + int(i[1]) # 第二列数值都加9443
# # print(fir)
# # print(str(sec))
# f_out.write(fir + ' ' + str(sec) + '\n') # 把前两列写入新的txt文件
接着我们需要对划分训练集、测试集、验证集的json文件进行处理,由于我们采用的是自己的数据集,每一个txt的文件名与之前官方数据集中的文件名一定不一样,所以需要编写脚本对控制训练集、测试集、验证集读入的三个json文件进行修改。具体代码如下(路径名同样需要修改为自己的路径名):
import os
filePath = 'D:\\点云数据处理小组\\pointnet-my\\data\\shapenetcore_partanno_segmentation_benchmark_v0_normal\\03797390'
#####最后一行会出现一个, 报错!!!!!!!!!
######手动删除或改进程序
#####
file = '1.txt'
with open(file,'a') as f:
f.write("[")
for i,j,k in os.walk(filePath):
for name in k:
base_name=os.path.splitext(name)[0] #去掉后缀 .txt
f.write(" \"")
f.write(os.path.join("shape_data/03797390/",base_name))
f.write("\"")
f.write(",")
f.write("]")
f.close()
最后在实际程序运行时发现会由于含0的数据过多而导致模型分类不准确,如下:
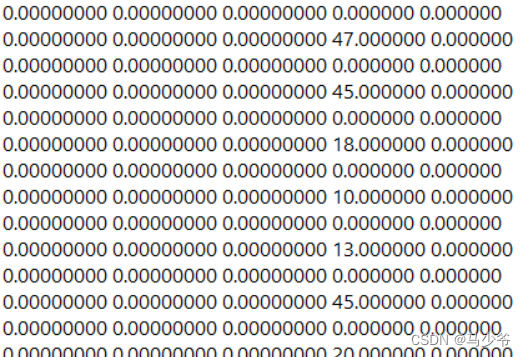
而根据具体项目的实际物理意义(这里的全0即表示未被激光探测到的位置,x,y,z坐标均标注为0),所以编写脚本程序对全0的部分进行去除:
# -*- coding:utf-8 -*-
import os
filePath = 'D:\\点云数据处理小组\\pointnet-my\\data\\shapenetcore_partanno_segmentation_benchmark_v0_normal\\03797390'
for i,j,k in os.walk(filePath):
for name in k:
list1 = []
for line in open(filePath+name):
a = line.split()
#print(a)
b = a[0:6]
#print(b)
a1 =float(a[0])
a2 =float(a[1])
a3 =float(a[2])
#print(a1)
if(a1==0 and a2==0 and a3==0):
continue
list1.append(b[0:6])
with open(filePath+name, 'w+') as file:
for i in list1:
file.write(str(i[0]))
file.write(' '+str(i[1]))
file.write(' ' + str(i[2]))
file.write(' ' + str(i[3]))
file.write(' ' + str(i[4]))
if(i!=list[-1]):
file.write('\n')
file.close()
三、 模型训练
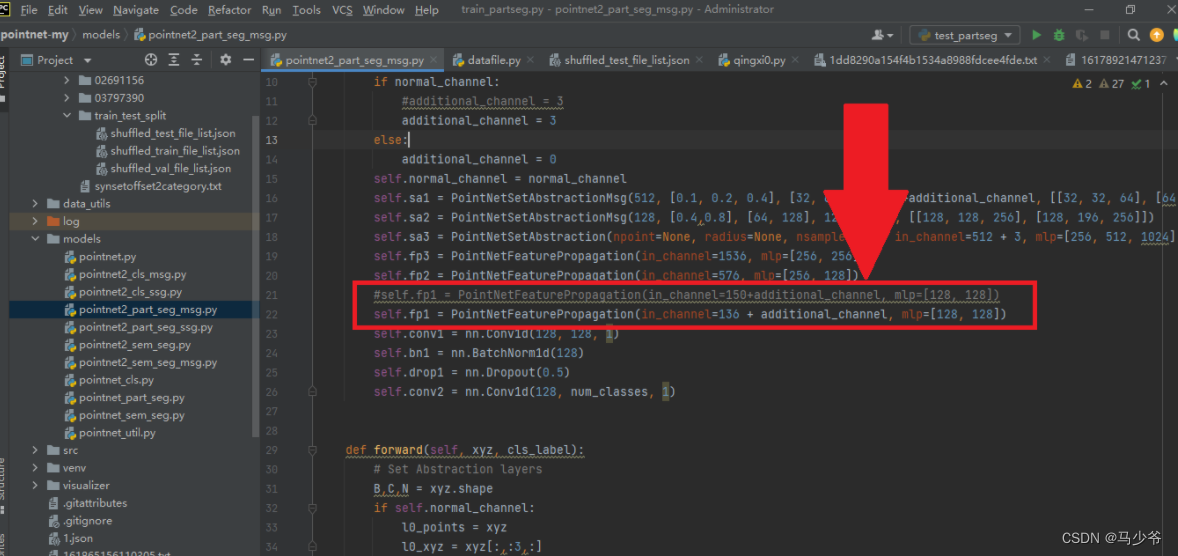
我们打开项目文件夹下的model文件夹,选择以pointnet2_part_seg_msg为名的python文件,双击进入:
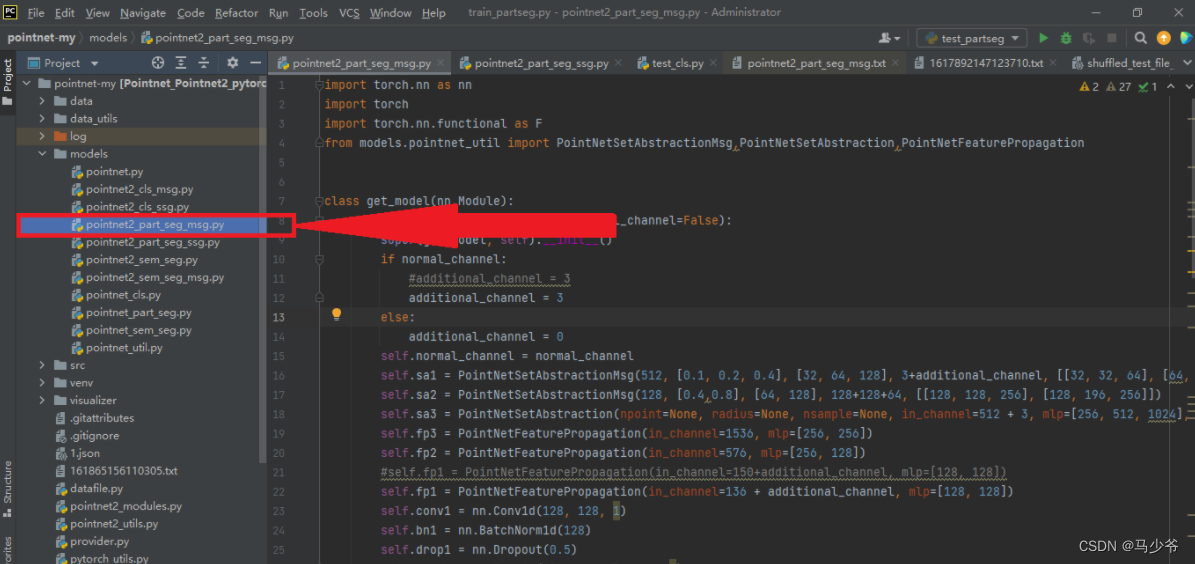
接下来我们需要修改的地方为PointNetFeaturePropagation的in_channel,具体方法为128+4分割的总类个数,比如这里我们的分割采用的是两个物体,每个物体均为2分类,所以通道数为128+42=136:
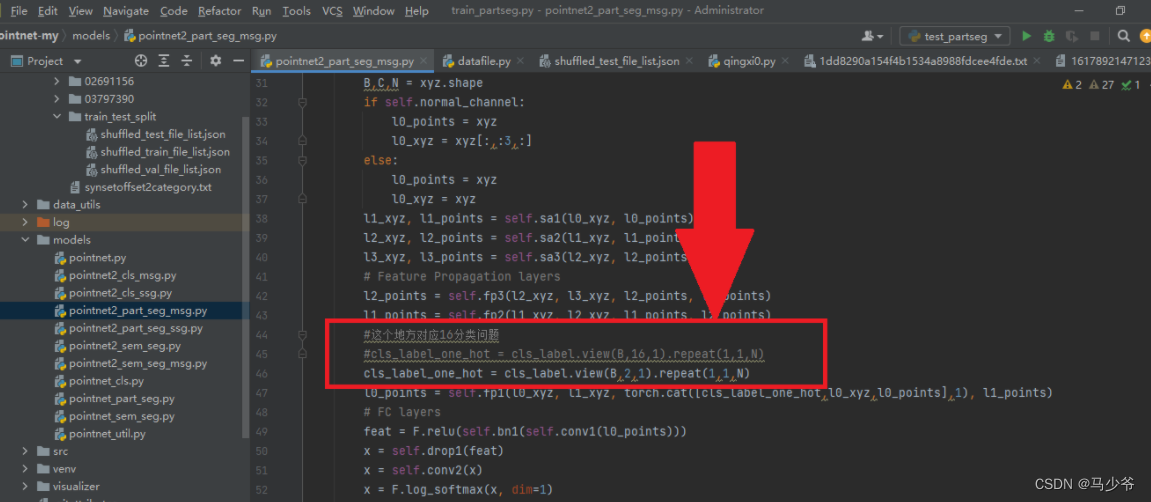
接着我们需要修改独热编码部分,将view方法中的第二个参数修改为需要被分割的物体的种类数:
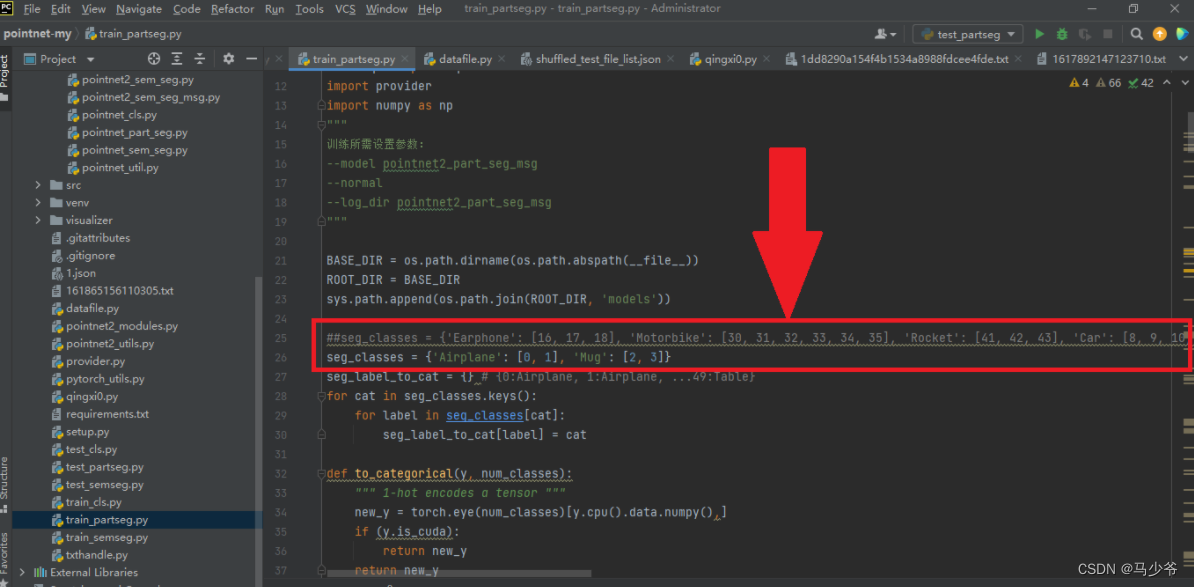
2.2.5 训练模型部分的修改
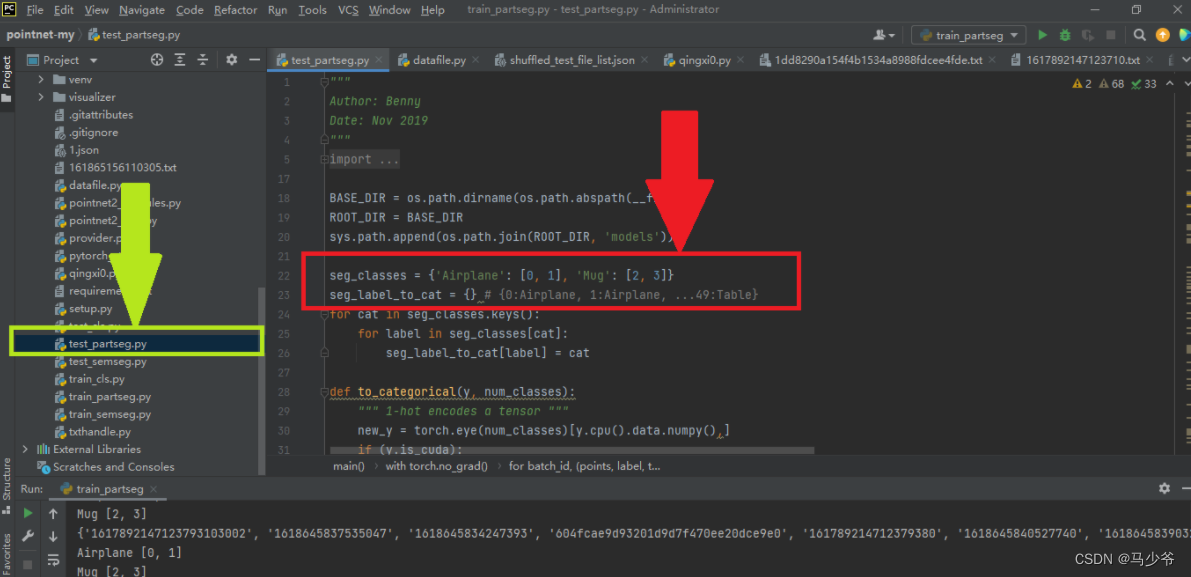
在训练模型的时候,我们需要修改要分类的对象seg_classes为我们自己的数据集对应的类别,如例子中的分类两个类别,每个类别有两个部件。(为了方便,我们保留了原来的’Airplane’: [0, 1], ‘Mug’: [2, 3]这两个名字,同时应该注意,编号应该从0开始依次编号,若不是这样则会报错),同时应该注意自己的电脑是否支持cuda加速,如果没有GPU,则可以把代码后面所有的".cuda()"删去,程序才能正确运行。
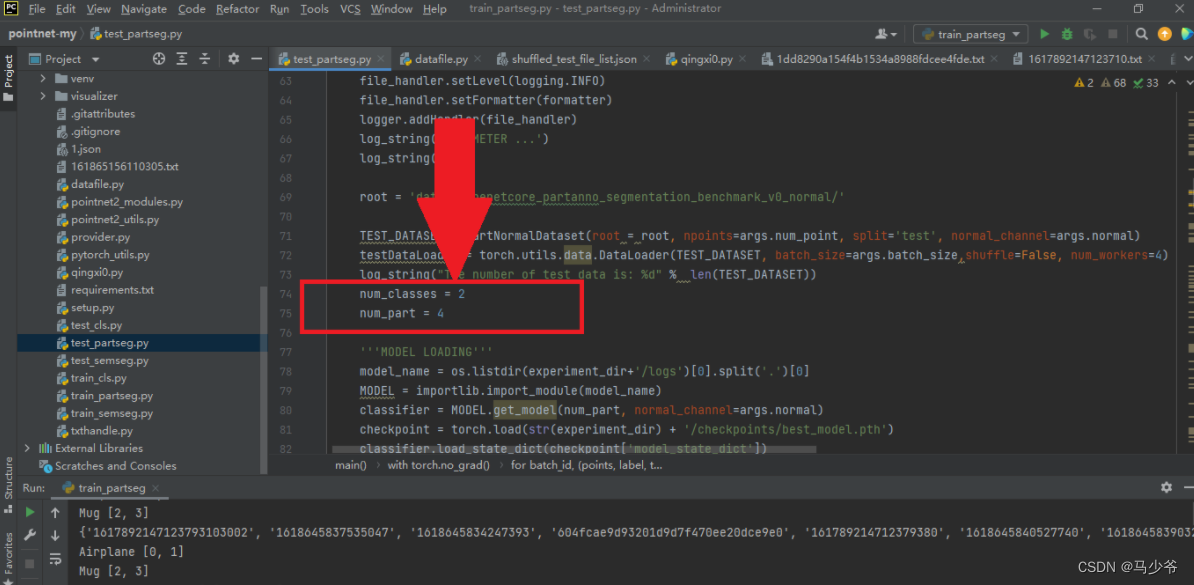
接下来我们需要修改分割的物体总数num_classes为自己的类别个数,总共的部件数为自己的总个数:num_part。

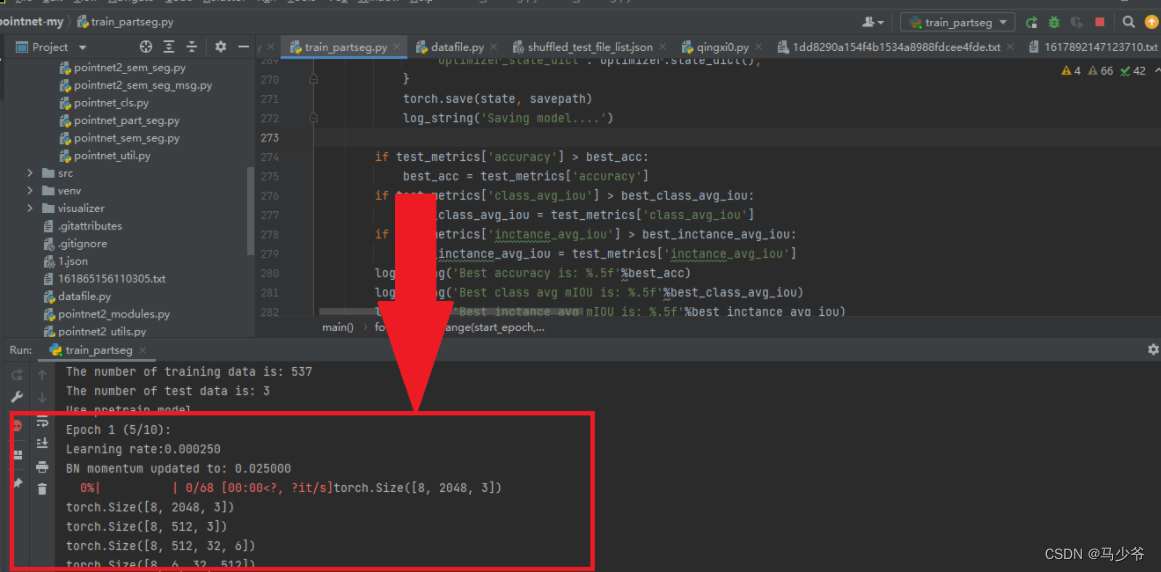
最后,右键运行程序,如果出现进度条则表明模型已经成功改进,可以跑通自己的数据集啦!
四、打印模型预测数据
我们在用自己的数据集训练完模型后,将利用名为test_partseg的python文件进行模型的测试,为了更好的理解模型以及测试模型效果,我们有时需要打印出模型预测后的点云坐标。这里给出test_partseg文件的修改方法以及运行结果。
4.1 测试模型代码修改
首先我们需要找到该python文件,接着与上面同样的修改如下图的两个地方:
接着我们需要编写代码打印出分类后的具有不同标签的坐标,本例子中要打印两个物体的四个类别的坐标点,代码如下(部分代码):
for j in aaa:
#print(points1[i,j])
res1= open(r'E:\03797390_0_'+str(i)+'.txt', 'a')
res1.write('\n' + str(points1[i,j]).strip('[]'))
res1.close()
xxxxxx=xxxxxx+1
bbb = numpy.argwhere(cur_pred_val[i] == 1)
for j in bbb:
#print(points1[i, j])
res2 = open(r'E:\03797390_1_' + str(i) + '.txt', 'a')
res2.write('\n' + str(points1[i,j]).strip('[]'))
res2.close()
xxxxxx = xxxxxx + 1
ccc = numpy.argwhere(cur_pred_val[i] == 2)
for j in ccc:
#print(points1[i, j])
res3 = open(r'E:\02691156_2_' + str(i) + '.txt', 'a')
res3.write('\n' + str(points1[i,j]).strip('[]'))
res3.close()
xxxxxx = xxxxxx + 1
ddd = numpy.argwhere(cur_pred_val[i] == 3)
for j in ddd:
#print(points1[i, j])
res4 = open(r'E:\02691156_3_' + str(i) + '.txt', 'a')
res4.write('\n' + str(points1[i,j]).strip('[]'))
res4.close()
xxxxxx = xxxxxx + 1
修改完成后运行程序发现可以显示结果,表明修改成功!
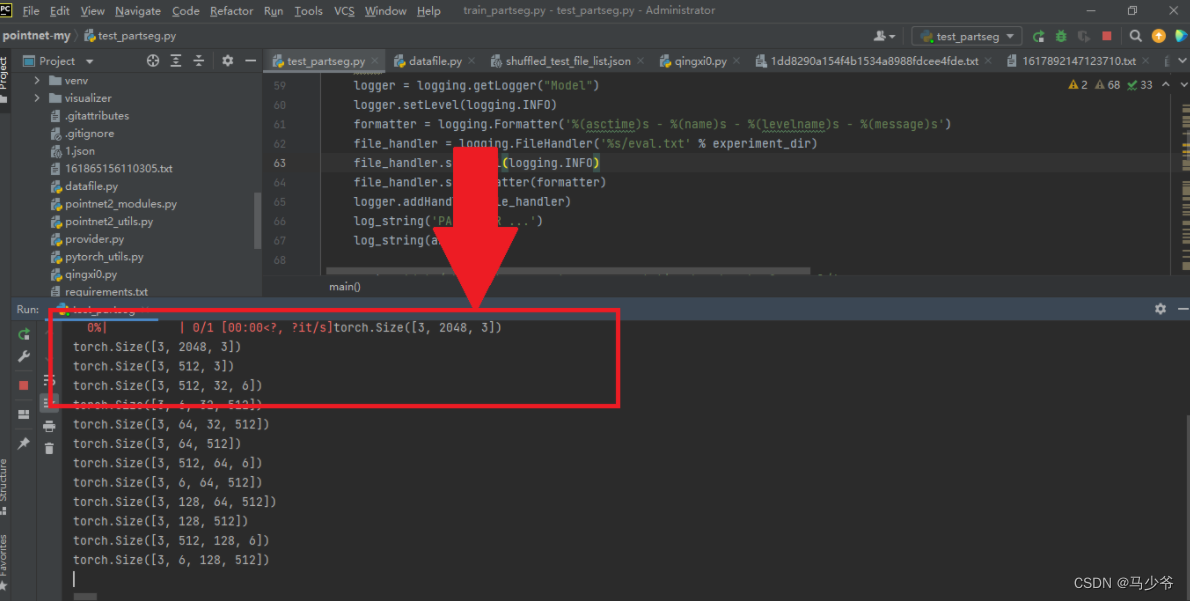
打印出的点云坐标格式如下:

参考文献:https://blog.csdn.net/weixin_44603934/article/details/123589948