时间究竟是什么?这既可以是一个哲学问题,也可以是一个物理问题。古人对太阳进行观测,利用太阳的投影发明了日晷,定义了最初的时间。随着科技的发展,天文观测的精度也越来越准确,人们发现地球的自转并不是完全一致的,这就导致每天经过的时间是不一样的。这点误差对于基本生活基本没有影响,但是对于股票交易、火箭发射等等要求高精度时间的场景就无法忍受了。科学家们开始把观测转移到了微观世界,找到了一种运动高度稳定的原子——铯,最终定义出了准确的时间:铯原子电子跃迁 9192631770 个周期所持续的时间长度定义为 1 秒。基于这个定义制造出了高度稳定的原子钟。
时间在计算机中又是如何定义的呢?通常使用 Unix 时间戳进行表示,记录的是自公元 1970 年 1 月 1 日 0 时 0 分 0 秒以来的秒数。计算机为了维持时钟的走时,硬件层面使用晶体振荡器保障时钟的精确性(也是石英钟的原理),操作系统层面使用时钟中断去更新时间的流逝。现代计算机的硬件设计通常有独立的时钟(RTC),这源于 Intel 和微软创立的标准 High Precision Event Timer(HPET),标准指定了 10 MHz 的时钟速度,因此时钟可以获得 100 纳秒的分辨率。这也是 .NET 时间有关的类型中 Ticks 属性的由来,1秒 = 10000000 Ticks。虽然计算机的时钟已经足够精准,但也会受到环境温度的影响造成过快或者过慢的问题。为了对计算机的时钟进行校准,通常使用 NTP 协议与网络中的时间服务器进行同步。时间服务器的时间又会使用 GPS 接收机、无线电或者是原子钟进行校准。
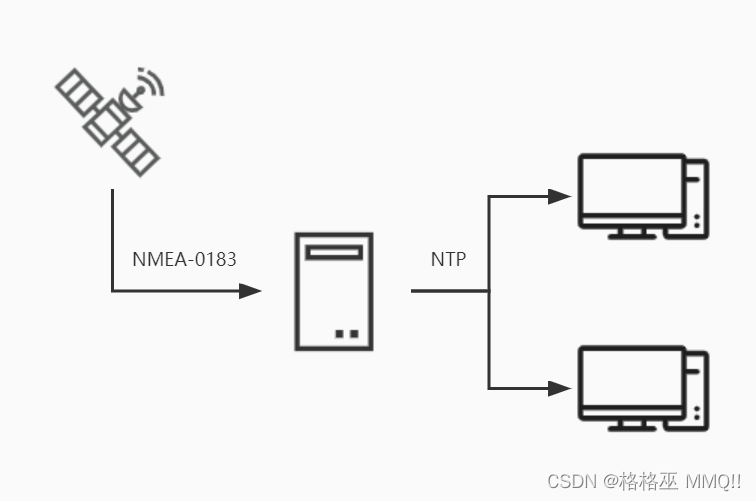
本文将从 GPS 时间的获取、NTP 报文的编写实现一个“玩具”级别的时间同步服务器,使用 .NET 6 编写一个控制台应用程序,通过本文你可以学到:
串口 SerialPort 类的使用;
使用 Socket 类实现 UDP 的监听与回复;
在程序中使用 Process 类执行命令行指令;
了解 GPS 数据报文的 NMEA-0183 协议;
了解 NTP 协议报文。
硬件需求
电路
GPS 数据报文的 NMEA-0183 协议
NTP 协议报文
编写代码
项目结构
项目依赖
配置串口读取 GPS 数据
实现 NTP 服务
部署应用
发布到文件
构建 Docker 镜像
后续工作
硬件需求
名称 描述 数量
计算机 可以是运行 Linux 的开发板,也可以是运行 Windows 的电脑 x1
NEO-6M GPS 模块 x1
USB 串口 可选,使用 USB 串口将 GPS 模块与计算机相连 x1
杜邦线 传感器与开发板的连接线 若干
电路
传感器 接口 开发板接口
NEO-6M TX 开发板或 USB 串口的RX
RX 开发板或 USB 串口的TX
VCC 5V
GND GND
GPS 数据报文的 NMEA-0183 协议
NMEA-0183 是 GPS 设备输出信息的标准格式,是由美国国家海洋电子协会(National Marine Electronics Association)定制的标准。NMEA-0183 有多种不同的数据报文,每种都是独立的 ASCII 字符串,使用逗号隔开数据,数据流长度从 30-100 字符不等,通常以每秒间隔选择输出。NMEA-0183 协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有 G P G G A 、 GPGGA、 GPGGA、GPGSA、 G P G S V 、 GPGSV、 GPGSV、GPRMC、$GPVTG 等。下面给出这些常用 NMEA-0183 语句的解释。
帧名称 说明 最大帧长
$GPGGA 全球定位数据 72
$GPGSA 卫星 PRN 数据 65
$GPGSV 卫星状态信息 210
$GPRMC 推荐最小数据 70
G P V T G 地面速度信息 34 由于我们只需要从 G P S 中获取时间信息,选择包含时间信息的“ GPVTG 地面速度信息 34 由于我们只需要从 GPS 中获取时间信息,选择包含时间信息的 “ GPVTG地面速度信息34由于我们只需要从GPS中获取时间信息,选择包含时间信息的“GPRMC 推荐最小数据”帧进行解析:
$GPRMC <1> <2> <3> <4> <5> <6> <7> <8> <9> <10> <11> <12><13>
帧头 UTC 时间 定位状态 纬度 纬度半球 经度 经度半球 地面速率 地面航向 UTC 日期 磁偏角 磁偏角方向 模式 * 校验和
下面以一个真实的数据帧为例 $GPRMC,013717.00,A,3816.57392,N,10708.73951,E,0.467,050722,A78:
$GPRMC 013717.00 A 3816.57392 N 10708.73951 E 0.467 050722 A*78
帧头 UTC 时间 01:37:17 A=有效定位,V=无效定位 纬度 38 度 16.57392 分 北纬 经度 107 度 8.73951 分 东经 地面速率 0.467 节 航向 度 UTC 日期 2022/07/05 磁偏角 度 磁偏角方向 A=自主定位,N=数据无效
因此,通过串口读取 $GPRMC 数据帧后,需要解析 <1> 和 <9> 字段的值,并将其转换为 UTC 时间。
细心的你也许会发现获取到的时间信息只精确到秒,GPS 明明使用的是原子钟,这是为什么?仔细观察手中的 GPS 模块,还有一个 PPS 针脚没有使用。PPS(Pulse Per Second)是秒脉冲,一般是由 GPS 接收机或原子钟按秒发出的、宽度小于1秒、有着急升或突降边沿的脉冲信号,通常用于精确计时和测量时间。PPS 信号能精确地(亚毫秒级)指示每一秒的开始时间,但不能指示对应现实时间的哪一秒,因此只能作为辅助信号,与卫星导航信息组合使用,提供低延迟、低抖动的授时服务。很遗憾,.NET 目前没法直接操作 PPS 引脚,我们只能实现一个“玩具”级的时间同步服务器了。
NTP 协议报文
NTP(Network Time Protocol),网络时间协议,是一种使用 UDP 的计算机之间进行时间同步的网络协议,位于 OSI 7 层网络模型中的应用层,默认使用的端口为 123。那么使用 NTP 是如何进行时间同步的呢?简单的说将发送的报文打上本机的时间戳,配合报文来回传输的时延修正本机的时间。如下图所示,可以计算出网络传输时延 δ,以及客户端与服务端的时间偏移 θ:
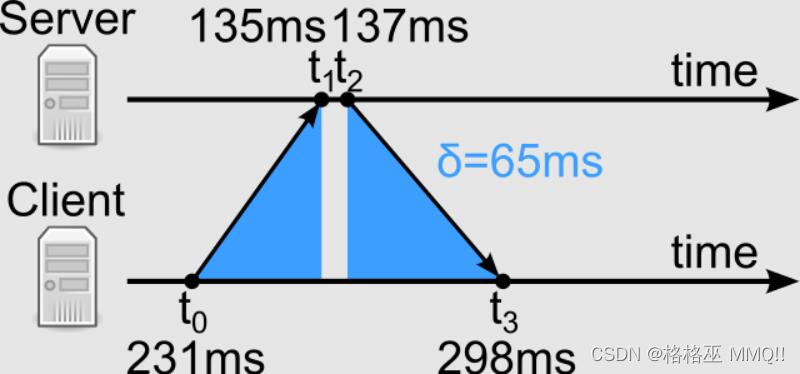
δ=(t3−t0)−(t2−t1)
θ=(t1−t0)+(t2−t3)2
其中,t0 是请求报文传输的客户端时间戳,t1 是请求报文接收的服务器时间戳,t2 是回复报文传输的服务器时间戳,t3 是回复报文接收的客户端时间戳。客户端和服务端都有一个时间轴,分别代表着各自系统的时间,当客户端想要同步服务端的时间时,客户端会构造一个 NTP 报文发送到服务端,客户端会记下此时发送的时间 t0,经过一段网络延时传输后,服务器在 t1 时刻收到报文,经过一段时间处理后在 t2 时刻向客户端返回报文,再经过一段网络延时传输后客户端在 t3 时刻收到服务器报文。这样客户端就可以校准自己的本机时间了。
在了解 NTP 同步时间的过程后,下面解析 NTP 报文具体包含的字段,一般的 NTP 报文长度为 48 字节:
字段 说明
LI 闰秒指示,2bit
Version NTP 版本,3bit
Mode 工作模式,3bit ,客户端=0b011,服务器=0b100
Stratum 时钟层数,8bit,层数为 0 的设备为高精度的时钟(如原子钟),层数为 1 的设备与层数 0 的设备直接相连,……
Poll Interval 轮询时间,8bit,连续 NTP 报文之间的最大时间间隔
Precision 时钟精度,8bit
Root Delay 根时延,32bit,表示在主参考源之间往返的总共时延
Root Dispersion 根离散,32bit,相对于主参考源的标称误差
Reference ID 参考源的标识,32bit,4 个字符或 IP 地址
Reference Timestamp 参考时间戳,64bit,本地时钟最后一次被更新的时间
| Originate Timestamp | 原始时间戳 t0,64bit,客户端发送的时间 |
| Receive Timestamp | 接受时间戳 t1,64bit,服务端接受到的时间 |
| Transmit Timestamp | 传送时间戳 t2,64bit,服务端发送的时间 |
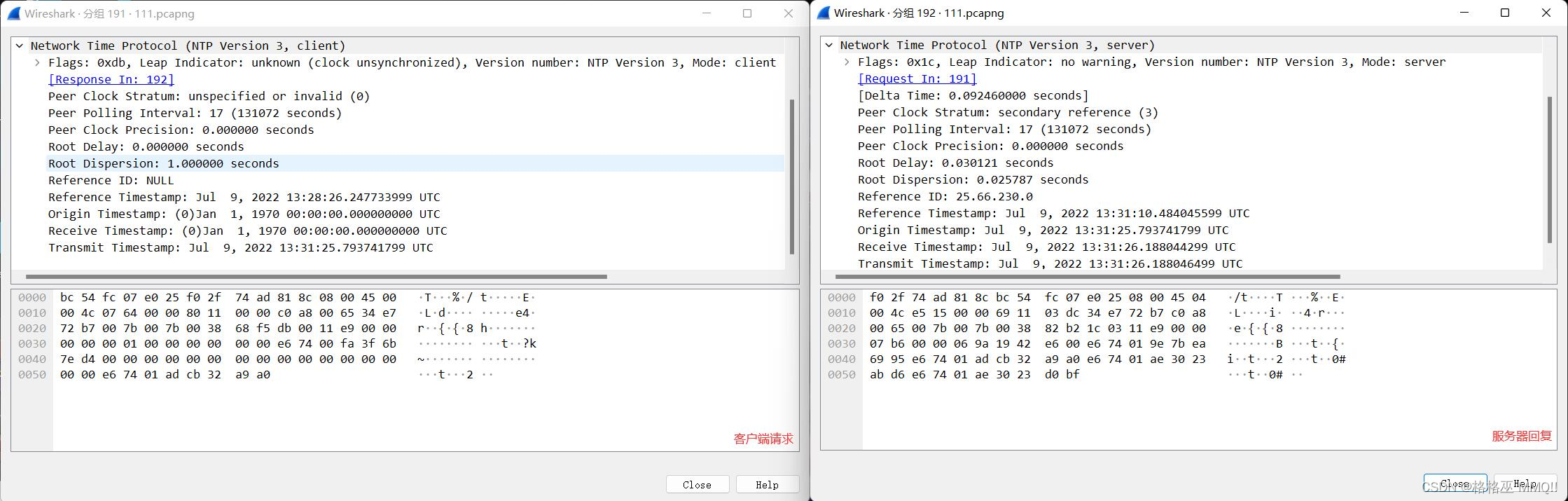
其中要注意的是 NTP 时间戳的起始时间是 1900-01-01 00:00:00,而不是 Unix 时间戳的起始时间 1970-01-01 00:00:00。
下面是使用 Wireshark 抓取的 Windows 时钟同步的 NTP 报文:
编写代码
项目地址:https://github.com/ZhangGaoxing/gps-ntp
项目结构
创建一个控制台应用和类库,项目结构如下:
项目依赖
添加如下 NuGet 包引用:
初始化串口;
读取 $GPRMC 数据帧的内容,提取时间信息;
更新系统时间。
初始化串口
使用串口时最重要的属性是波特率,请查阅对应 GPS 模块的数据手册,这里使用的 NEO-6M 模块的波特率是 9600。串口的名称取决于你的连接方式,在 Linux 中串口对应的驱动文件在 /dev 目录下,使用内置串口可能的文件名称为 ttySx,使用 USB 串口可能的文件名称为 ttyUSBx,在 Windows 中串口的名称为 COMx,其中 x 表示的是数字编号。
// 使用的串口名称
const string SERIAL_NAME = “/dev/ttyUSB0”;
using SerialPort gps = new SerialPort(SERIAL_NAME)
{
BaudRate = 9600,
Encoding = Encoding.UTF8,
ReadTimeout = 500,
WriteTimeout = 500,
};
从串口中获取数据
从串口中读取数据时使用的是 SerialPort 类中的 DataReceived 事件。事件(event)可以理解为一种广播,当完成某种操作后向外发送通知。即串口接收到数据后,触发数据处理事件。
gps.DataReceived += GpsFrameReceived;
///
/// GPS 报文处理
///
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e)
{
// TODO:读取 $GPRMC 数据帧;提取时间;更新系统时间
}
由于 GPS 模块输出的不只有 $GPRMC 数据帧,因此需要在处理事件中判断帧头以及帧的有效性。
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e)
{
string frame = gps.ReadLine();
if (frame.StartsWith("$GPRMC"))
{
// $GPRMC,UTC 时间,定位状态,纬度,纬度半球,经度,经度半球,速度,航向,UTC 日期,磁偏角,磁偏角方向,指示模式*校验和
// $GPRMC,013717.00,A,3816.57392,N,10708.73951,E,0.467,,050722,,,A*78
string[] field = frame.Split(',');
// 帧数据有效
if (!field[12].StartsWith("N"))
{
// TODO:提取时间;更新系统时间
}
}
}
在验证 $GPRMC 数据帧有效后,根据帧解析提取对应字段的时间信息。
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e)
{
string frame = gps.ReadLine();
if (frame.StartsWith("$GPRMC"))
{
string[] field = frame.Split(',');
if (!field[12].StartsWith("N"))
{
// 获取 GPS 时间
string time = field[1][0..6];
string date = field[9];
DateTime utcNow = DateTime.ParseExact($"{date}{time}", "ddMMyyHHmmss", CultureInfo.InvariantCulture);
// TODO:更新系统时间
}
}
}
更新系统时间
由于 .NET 并不提供修改系统时间的操作,因此我们要使用间接的方式修改系统时间。一种方式是使用 P/Invoke 调用 C++ 的函数,这种方式可以精确的修改时间,但涉及引用、数据类型转换,过于复杂,和本入门指南不符。这里使用的是运行命令行指令的方式修改系统的时间,但修改时间的精度只能精确到秒。在 Windows 中使用 PowerShell 的 Set-Date 命令,在 Linux 中使用 date 命令。
///
/// 更新系统时间
///
void UpdateSystemTime(DateTime time)
{
ProcessStartInfo processInfo;
if (RuntimeInformation.IsOSPlatform(OSPlatform.Windows))
{
processInfo = new ProcessStartInfo
{
FileName = “powershell.exe”,
Arguments = $“Set-Date “””{time.ToLocalTime().ToString(“yyyy-MM-dd HH:mm:ss”)}“”“”,
RedirectStandardOutput = true,
UseShellExecute = false,
CreateNoWindow = true,
};
}
else
{
processInfo = new ProcessStartInfo
{
FileName = “date”,
Arguments = $“-s “{time.ToLocalTime().ToString(“yyyy-MM-dd HH:mm:ss”)}””,
RedirectStandardOutput = true,
UseShellExecute = false,
CreateNoWindow = true,
};
}
var process = Process.Start(processInfo);
process.WaitForExit();
}
最终报文处理事件由以下代码构成:
void GpsFrameReceived(object sender, SerialDataReceivedEventArgs e)
{
string frame = gps.ReadLine();
if (frame.StartsWith("$GPRMC"))
{
string[] field = frame.Split(',');
if (!field[12].StartsWith("N"))
{
string time = field[1][0..6];
string date = field[9];
DateTime utcNow = DateTime.ParseExact($"{date}{time}", "ddMMyyHHmmss", CultureInfo.InvariantCulture);
UpdateSystemTime(utcNow);
// 记录时钟最后一次被更新的时间
lastUpdatedTime = utcNow;
}
}
}
使用 gps.Open(); 打开串口后就可以获取时间数据了。
实现 NTP 服务
下面使用 Socket 类实现一个简单的 UDP 服务器,用于监听和回复 NTP 报文。
初始化 UDP 服务
// NTP 服务初始化
using Socket ntpServer = new Socket(AddressFamily.InterNetwork, SocketType.Dgram, ProtocolType.Udp);
IPEndPoint ip = new IPEndPoint(IPAddress.Any, 123);
ntpServer.Bind(ip);
监听和回复 NTP 报文
在后台新建一个进程用于监听 NTP 请求报文:
new Thread(NtpFrameReceived)
{
IsBackground = true
}.Start();
///
/// NTP 报文接收与回复
///
void NtpFrameReceived()
{
// 存储接收到的 NTP 请求报文
Span receiveFrame = stackalloc byte[48];
while (true)
{
// 接收请求报文
EndPoint clientPoint = new IPEndPoint(IPAddress.Any, 0);
ntpServer.ReceiveFrom(receiveFrame, ref clientPoint);
DateTime receiveTime = DateTime.UtcNow;
// TODO:回复 NTP 报文
}
}
根据帧解析生成 NTP 回复报文:
///
/// 生成 NTP 报文
///
Span GenerateNtpFrame(Span receivedFrame, DateTime receiveTime)
{
Span ntpFrame = stackalloc byte[48]
{
0x1c, 0x01, 0x11, 0xe9, 0x00, 0x00, 0x00, 0x00,
0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
// Client Transmit Timestamp => Server Origin Timestamp
for (int i = 0; i < 8; i++)
{
ntpFrame[24 + i] = receivedFrame[40 + i];
}
// 本机时钟最后更新时间
long referenceTicks = (lastUpdatedTime - ntpStart).Ticks;
uint referenceTimeInt = (uint)(referenceTicks / TICK_2_SECOND);
uint referenceTimeFract = (uint)(referenceTicks % TICK_2_SECOND);
var referenceTimeIntByte = BitConverter.GetBytes(referenceTimeInt);
var referenceTimeFractByte = BitConverter.GetBytes(referenceTimeFract);
// 接收报文时间
long receiveTicks = (receiveTime - ntpStart).Ticks;
uint receiveTimeInt = (uint)(receiveTicks / TICK_2_SECOND);
uint receiveTimeFract = (uint)(receiveTicks % TICK_2_SECOND);
var receiveTimeIntByte = BitConverter.GetBytes(receiveTimeInt);
var receiveTimeFractByte = BitConverter.GetBytes(receiveTimeFract);
// 发送报文时间
long transmitTicks = (DateTime.UtcNow - ntpStart).Ticks;
uint transmitTimeInt = (uint)(receiveTicks / TICK_2_SECOND);
uint transmitTimeFract = (uint)(receiveTicks % TICK_2_SECOND);
var transmitTimeIntByte = BitConverter.GetBytes(receiveTimeInt);
var transmitTimeFractByte = BitConverter.GetBytes(receiveTimeFract);
if (BitConverter.IsLittleEndian)
{
for (int i = 0; i < 4; i++)
{
ntpFrame[19 - i] = referenceTimeIntByte[i];
ntpFrame[23 - i] = referenceTimeFractByte[i];
ntpFrame[35 - i] = receiveTimeIntByte[i];
ntpFrame[39 - i] = receiveTimeFractByte[i];
ntpFrame[43 - i] = transmitTimeIntByte[i];
ntpFrame[47 - i] = transmitTimeFractByte[i];
}
}
else
{
for (int i = 0; i < 4; i++)
{
ntpFrame[16 + i] = referenceTimeIntByte[i];
ntpFrame[20 + i] = referenceTimeFractByte[i];
ntpFrame[32 + i] = receiveTimeIntByte[i];
ntpFrame[36 + i] = receiveTimeFractByte[i];
ntpFrame[40 + i] = transmitTimeIntByte[i];
ntpFrame[44 + i] = transmitTimeFractByte[i];
}
}
return ntpFrame.ToArray();
}
最终报文请求与回复由以下代码构成:
void NtpFrameReceived()
{
Span receiveFrame = stackalloc byte[48];
while (true)
{
EndPoint clientPoint = new IPEndPoint(IPAddress.Any, 0);
ntpServer.ReceiveFrom(receiveFrame, ref clientPoint);
DateTime receiveTime = DateTime.UtcNow;
// 回复 NTP 报文
Span<byte> sendFrame = GenerateNtpFrame(receiveFrame, DateTime.UtcNow);
ntpServer.SendTo(sendFrame, clientPoint);
DateTime sendTime = DateTime.UtcNow;
}
}
将上述代码进行整合就构成了基于 GPS 的 NTP 时间同步服务器。
部署应用
发布到文件
切换到 GpsNtp 项目运行发布命令:
dotnet publish -c release -r linux-x64 --no-self-contained
将发布后的文件通过 FTP 等方式复制到 Linux 开发板;
为 GpsNtp 文件增加可执行权限
sudo chmod +x GpsNtp
运行程序
sudo ./GpsNtp
构建 Docker 镜像
在项目的根目录中创建 Dockerfile,并将整个项目复制到 Linux 开发板中:
FROM mcr.microsoft.com/dotnet/core/sdk:6.0-focal AS build
WORKDIR /app
publish app
COPY src .
WORKDIR /app/GpsNtp
RUN dotnet restore
RUN dotnet publish -c release -r linux-arm -o out
run app
FROM mcr.microsoft.com/dotnet/core/runtime:6.0-focal AS runtime
WORKDIR /app
COPY --from=build /app/GpsNtp/out ./
ENTRYPOINT [“dotnet”, “GpsNtp.dll”]
切换到项目目录,构建镜像:
docker build -t gps-ntp -f Dockerfile .
运行镜像:
docker run --rm -it --device /dev/ttySx gps-ntp
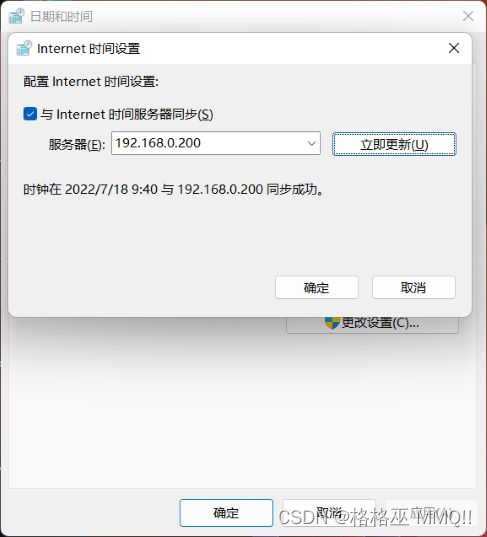
程序运行后,使用 Windows 时间同步服务进行一下测试。