最近在LeetCode的每日一题和实验中接连遇到凸包问题,因为之前从来没写过,于是写这篇博客记录一下,内容部分参考每日一题的官方题解和算法导论。算法的具体描述以及代码实现多为个人理解,如有谬误还请指出。
问题定义
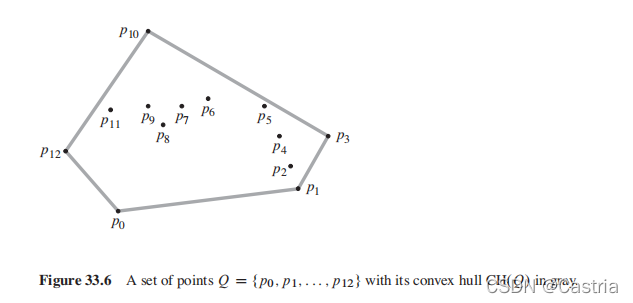
点集 Q Q Q的凸包(Convex hull)是一个最小的凸多边形 P P P,满足 Q Q Q中的每个点都在 P P P的边界上或者在 P P P的内部。现给定一个点集,求解其凸包(即构成凸包的点集)。
下图给出了 p 0 . . . p 12 p_0...p_{12} p0...p12的闭包:
Graham扫描法
Graham扫描法由Graham在1972年提出,它可以以 O ( n l o g n ) O(nlogn) O(nlogn)时间复杂度求解凸包问题,其中 n n n为点集大小。以下是算法的伪代码:
GRAHAM-SCAN(Q)
令p_0为Q中具有最小纵坐标的点(当存在多个时,选取横坐标最小的点);
令<p_1,p_2,...,p_m>为Q中剩下的点,以p_0为极点对这些点按照极角逆时针排序(若两点极角相同,仅保留距离最大的那个);
if m < 2
return "凸包为空"
else
令S为空栈
PUSH(p0, S)
PUSH(p1, S)
PUSH(p2, S)
for i = 3 to m
while NEXT-TO-TOP(S),TOP(S)和p_i形成非左移动
POP(S)
PUSH(p_i, S)
return S
下面分别对算法各部分进行说明。
确定极点
这一步是为了确定后面所需的基准点。由于纵坐标最小的点一定在凸包上,因此它一定可以作为基准点。至于选择横坐标最小的点的要求放到后面解释。
Java代码:
//函数原型
public static Set<Point> convexHull(Set<Point> points) {
}
int index = -1;
for(Point p: points) {
pointList.add(p);
if(index == -1) index = 0;
else {
Point miny = pointList.get(index);
if (p.y() < miny.y() || (p.y() == miny.y() && p.x() < miny.x())) {
index = pointList.size() - 1;
}
}
}
按极角排序
为了将点按照极角排序,需要叉乘运算辅助。在平面上,两个向量的叉乘定义为 a ⃗ × b ⃗ = a b s i n θ \vec a \times \vec b=absin\theta a×b=absinθ(这里不考虑结果的方向),其中 θ \theta θ是 a ⃗ \vec a a转向 b ⃗ \vec b b的不超过 180 ° 180\degree 180°的角度。当 a ⃗ \vec a a顺时针转向 b ⃗ \vec b b, θ > 0 \theta>0 θ>0;否则 θ < 0. \theta<0. θ<0.若 a ⃗ = ( x 1 , y 1 ) , b ⃗ = ( x 2 , y 2 ) , \vec a=(x_1,y_1),\vec b=(x_2,y_2), a=(x1,y1),b=(x2,y2),有 a ⃗ × b ⃗ = x 1 y 2 − x 2 y 1 . \vec a \times \vec b=x_1y_2-x_2y_1. a×b=x1y2−x2y1.因此,为了确定两个点 A , B A,B A,B以 O O O为极点的顺序,可以求叉乘 O A → × O B → , \overrightarrow{OA} \times \overrightarrow{OB}, OA×OB,若
( 1 ) O A → (1)\overrightarrow{OA} (1)OA顺时针转向 O B → , \overrightarrow{OB}, OB,此时有 θ > 0 , \theta>0, θ>0,叉乘值大于 0 0 0, A A A排在 B B B的前面;
( 2 ) (2) (2)否则,当 θ < 0 \theta<0 θ<0, A A A排在 B B B的后面。
( 3 ) (3) (3)当 O , A , B O,A,B O,A,B在一条线上,伪代码指出我们应该去掉距离 O O O更近的那个,但排序时删除点实现起来很麻烦,我们在这里将它们按距离排序:更近的排在前面。
代码实现:
Point base = pointList.get(index);//极点
pointList.sort(new Comparator<Point>() {
@Override
public int compare(Point A, Point B) {
//把极点放到最前面
if(A.x() == base.x() && A.y() == base.y()) return -1;
if(B.x() == base.x() && B.y() == base.y()) return 1;
//逻辑同上文
double crossVal = cross(base, A, B);
if(crossVal == 0) {
if(dist(base, A) < dist(base, B)) return -1;
return 1;
}
if(crossVal > 0) return -1;
return 1;
}
});
前面提到,伪代码告诉我们应该去掉相同极角的点中距离更小的,但是我们没有去掉。因此我们需要对下面的情况进行修正:
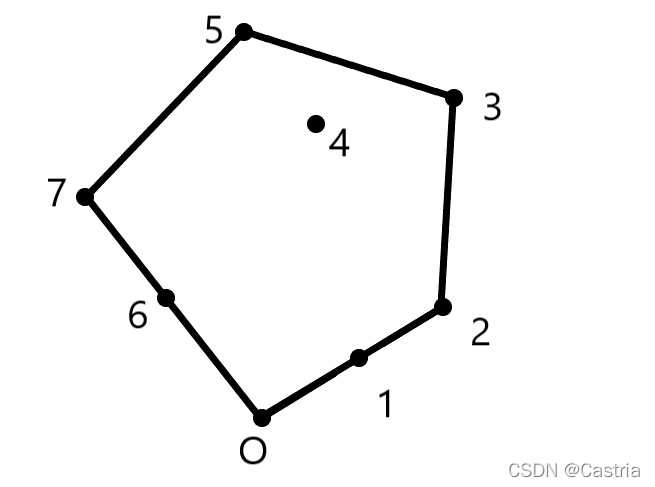
在求凸包的过程中,我们从逆时针地考察每个点,最后围成一个凸包,因此按照直觉,我们应该由近到远,再由远及近地考察。按照这个原则,图中1,2点的位置是正确的;但6,7点的位置反过来了。(若按照伪代码中的算法,1、6被去掉了,不会影响凸包的计算)因此,我们把极角最大的共线的这些点反转一下顺序(在图中即把6、7反过来)。此外,将这些点中最近的那些点去掉(否则也会有问题,放到后面解释):
int ptr = pointList.size() - 1;
//确定最后共线的点,最后[ptr+1,size-1]就是这些点
while(ptr >= 0 && cross(base, pointList.get(pointList.size() - 1), pointList.get(ptr)) == 0) ptr--;
//将它们反转
for(int p = ptr + 1, q = pointList.size() - 1; p < q; p++, q--) {
swap(pointList, p, q);
}
//移除最近的点,只剩下ptr+2个([0,ptr+1]共ptr+2个点)
while(pointList.size() > ptr + 2) pointList.remove(pointList.size() - 1);
确定凸包
( 1 ) (1) (1)对于 n ≤ 3 n\leq3 n≤3的情况,可以直接返回。(不考虑共线等情况)
( 2 ) (2) (2)否则,初始化空栈并将最前面的两个点放入栈中。对于接下来的每个点 B B B,设当前栈顶点为 A , A, A,栈内接下来一个点为 O O O,若 O A → \overrightarrow{OA} OA通过顺时针转动 θ > 0 \theta>0 θ>0可以指向 O B → \overrightarrow{OB} OB的方向,那么直接将 B B B入栈;否则,称此时形成非左移动,将 A A A出栈,重复操作直到栈中元素个数 < 2 <2 <2或形成左移。再将 B B B入栈。
注意我们还是没有完全按照伪代码中执行(初始将3个点放入栈中),考虑上面那张图:
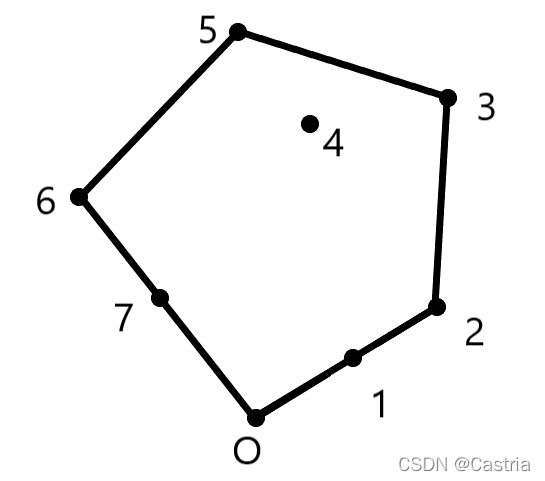
若一开始就将 O , 1 , 2 O,1,2 O,1,2放入栈中,在考察点 3 3 3后将其直接入栈,点 1 1 1就留在了栈中,导致所求点集不是最小凸包(当然,若不要求最小,这条限制无所谓)。而如果一开始只放入两个点,在考察 2 2 2时由于形成非左移动(共线当然也算非"左"),就将 1 1 1出栈。
代码实现:
for(int i = 2; i < pointList.size(); i++) {
while(S.size() >= 2) {
//取值并出栈
Point top = S.pop();
//只取值不出栈
Point nextTop = S.peek();
//满足条件,将多pop的放回去并break
if(cross(nextTop, top, pointList.get(i)) > 0) {
S.push(top);
break;
}
}
S.push(pointList.get(i));
}
return new HashSet<Point>(S);//返回
最后,解释一下:
(1)为什么极点要选择横坐标最小的点;
(2)为什么需要将最后几个共线的点去掉最近的。
对于(1),考虑如下点集:
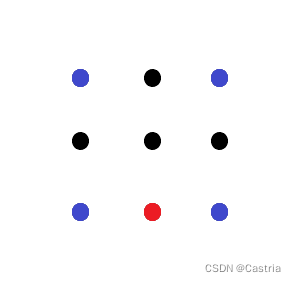
若将红点选作极点,最后选出的凸包点集是红点加上四个蓝点;然而这不是最小的凸包。纵坐标相同时按横坐标排序保证了选择左下角的蓝点作为极点,求出的凸包是最小的。
对于(2),
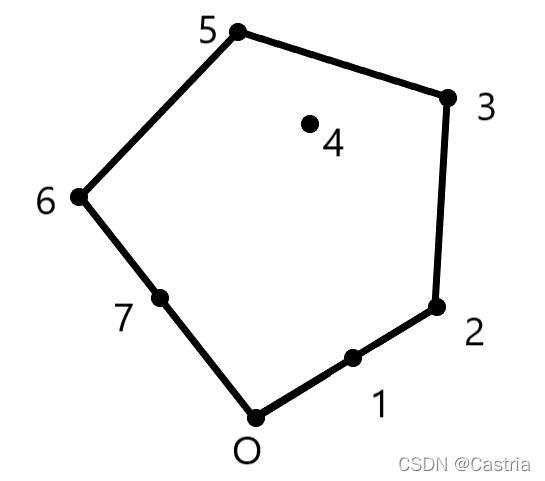
还是上面那张图:若不去掉7,最后在考察7时,按照上面逻辑判断,点5、6构成的向量可以通过向左旋转指向点7,那么会将7放入栈中,导致闭包不是最小。去掉最后几个点中最近的可以避免这一点。
下面的一张gif模拟了Graham扫描法的求解过程:(图源:Wikipedia Graham Scan词条)
时间复杂度
对于排序后的每个点,它至多出入栈一次,因此这部分时间复杂度为 O ( n ) O(n) O(n);因此,程序的复杂度由排序的 O ( n l o g n ) O(nlogn) O(nlogn)决定。
完整代码(Java)
private static double dist(Point A, Point B) {
double deltaX = B.x() - A.x();
double deltaY = B.y() - A.y();
return Math.sqrt(deltaX * deltaX + deltaY * deltaY);
}
private static double cross(Point O, Point A, Point B) {
return (A.x() - O.x()) * (B.y() - O.y()) - (A.y() - O.y()) * (B.x() - O.x());
}
public static Set<Point> convexHull(Set<Point> points) {
if(points.size() <= 3) return points;
ArrayList<Point> pointList = new ArrayList<Point>();
int index = -1;
for(Point p: points) {
pointList.add(p);
if(index == -1) index = 0;
else {
Point miny = pointList.get(index);
if (p.y() < miny.y() || (p.y() == miny.y() && p.x() < miny.x())) {
index = pointList.size() - 1;
}
}
}
Point base = pointList.get(index);
pointList.sort(new Comparator<Point>() {
@Override
public int compare(Point A, Point B) {
if(A.x() == base.x() && A.y() == base.y()) return -1;
if(B.x() == base.x() && B.y() == base.y()) return 1;
double crossVal = cross(base, A, B);
if(crossVal == 0) {
if(dist(base, A) < dist(base, B)) return -1;
return 1;
}
if(crossVal > 0) return -1;
return 1;
}
});
int ptr = pointList.size() - 1;
while(ptr >= 0 && cross(base, pointList.get(pointList.size() - 1), pointList.get(ptr)) == 0) ptr--;
for(int p = ptr + 1, q = pointList.size() - 1; p < q; p++, q--) {
swap(pointList, p, q);
}
while(pointList.size() > ptr + 2) pointList.remove(pointList.size() - 1);
Stack<Point> S = new Stack<Point>();
S.push(pointList.get(0));
S.push(pointList.get(1));
for(int i = 2; i < pointList.size(); i++) {
while(S.size() >= 2) {
Point top = S.pop();
Point nextTop = S.peek();
if(cross(nextTop, top, pointList.get(i)) > 0) {
S.push(top);
break;
}
}
S.push(pointList.get(i));
}
return new HashSet<Point>(S);
}
LeetCode 587.安装栅栏
这道题是2022.4.23的每日一题,它与上文介绍的不同点是,它要求的并非最小凸包,它要求所有在凸包边界上的点也应该被返回。大致思路与文章一致,但有两点需要注意:
(1)由于不要求最小凸包,可以按照算法导论中的伪代码,将前三个点初始地放入栈中;
(2)不需要去掉任何最后共线的那几个点。
(3)应当接受共线的点,即:当 O A → × O B → ≥ 0 \overrightarrow{OA}\times\overrightarrow{OB}\ge0 OA×OB≥0时,将 B B B入栈。
C++代码(当时写的着急,代码比较丑,时空消耗也爆炸):
class Solution {
public:
vector<vector<int>> outerTrees(vector<vector<int>>& trees) {
if(trees.size() <= 3) return trees;
int base, basex = INT_MAX, basey = INT_MAX;
for(int i = 0; i < trees.size(); i++) {
if(trees[i][1] < basey || (trees[i][1] == basey && trees[i][0] < basex)) {
base = i;
basex = trees[i][0];
basey = trees[i][1];
}
}
auto dist = [](int ax, int ay, int bx, int by) {
int deltaX = ax - bx;
int deltaY = ay - by;
return deltaX * deltaX + deltaY * deltaY;
};
auto cross = [](int ox, int oy, int ax, int ay, int bx, int by) {
return (ax - ox) * (by - oy) - (ay - oy) * (bx - ox);
};
//把极点放到最前面
swap(trees[0], trees[base]);
sort(trees.begin() + 1, trees.end(), [=](vector<int> a,vector<int> b){
int v = cross(basex, basey, a[0], a[1], b[0], b[1]);
if(!v) {
return dist(basex, basey, a[0], a[1]) < dist(basex, basey, b[0], b[1]);
}
return v > 0;
});
int n = trees.size(), r = n - 1;
while (r >= 0 && cross(trees[0][0], trees[0][1], trees[n - 1][0], trees[n - 1][1], trees[r][0], trees[r][1]) == 0) {
r--;
}
for (int l = r + 1, h = n - 1; l < h; l++, h--) {
swap(trees[l], trees[h]);
}
stack<vector<int>> S;
S.push(trees[0]);
S.push(trees[1]);
S.push(trees[2]);
for(int i = 3; i < trees.size(); i++) {
while(true) {
auto t = S.top();
S.pop();
auto nextt = S.top();
if(cross(nextt[0], nextt[1], t[0], t[1], trees[i][0], trees[i][1]) >= 0) {
S.push(t);
break;
}
}
S.push(trees[i]);
}
vector<vector<int>> v;
while(!S.empty()) {
v.push_back(S.top());
S.pop();
}
return v;
}
};