前言
上两篇已经讲解了有关Nav Mesh的大部分内容了,比如寻路AI的设置,动态障碍物,外链接的设置等等,本章将讲述Navigation属性栏的全部内容,包括AI寻路的区域与花费部分,烘焙的设置参数,等等。
本系列提要
Unity导航系统专题博客共分成三篇来讲解: 【本篇为第二篇】
目录
前排提醒:本文仅代表个人观点,以供交流学习,若有不同意见请评论留言,笔者一定好好学习,天天向上。
Unity版本[2019.4.10f1] 梦小天幼 & 禁止转载
一、Agents | 该参数本版本不生效,请参阅新版NavMesh
该参数本版本不生效,感兴趣可以看一下讲解,详情请参阅新版NavMesh,新版地址:https://github.com/Unity-Technologies/NavMeshComponents
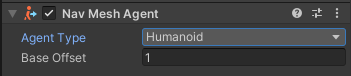
我们可以回顾一下第二篇讲的Nav Mesh Agent组件,其中有一个Agent Type参数,它和Agents选项卡这里的是同一种意思。只不过这边提供创建类型,修改类型,那边可以选择类型。
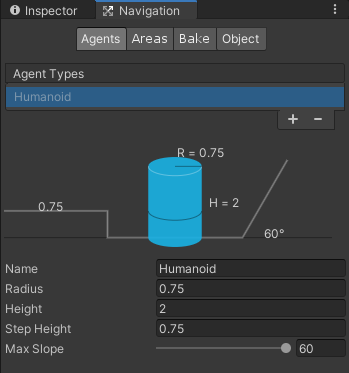
1.相关参数
| 参数 | 描述 |
|---|---|
| Name | 当前类型名字 |
| Radius | 当前AI半径 |
| Height | 当前AI高度 |
| Step Height | 当前AI可跨越的最高台阶 |
| Max Slope | 当前AI可攀爬的最高坡度 |
这些的作用在于,当你不同的寻路AI选择了不同的类型时,AI就可以根据本身类型来选择不同的道路,比如说前面有个很窄的巷子,半径很小的AI就可以通过,半径很大的只能绕路,注意!这里的半径不是指NavMeshAgent组件里面的半径(该半径只负责不同AI之间的间距,也就是碰撞),而是特指上图中的半径。
再次声明,上述作用仅在新版生效。
二、Areas | 区域与花费的代价
1.作用概述
区域与代价花费这一块,主要是定义了寻路AI穿越某些区域的难度,比如平原上有一条河,过河还是绕路,AI将根据两者的成本进行衡量,最终选择较低的那一条路。而这个成本的定义是由开发者决定的。
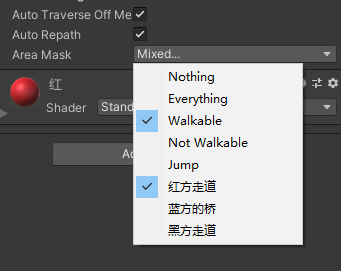
在NavMesh Agent还有一个Area Mask参数,忘记的可以回看一下上一篇博客,该参数作用则在于当前AI在寻路时,可以走哪条路以及禁止走哪条路(可多选,多选的情况下AI就会多方对比,选出代价最少的路),还是平原上有一条河,如果开发者定义了该AI禁止涉水,那么无论代价有多大,AI都会选择绕路。
2.区域的选择
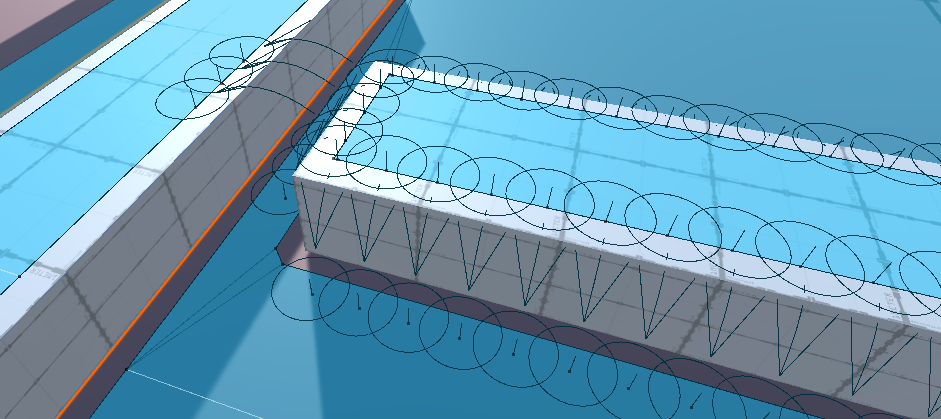
如图所示,当指定某些AI只能走某些路时,就会呈现这种情况,各走各路。下面说一下具体设置方式。
首先我们需要知道具体的区域设置界面
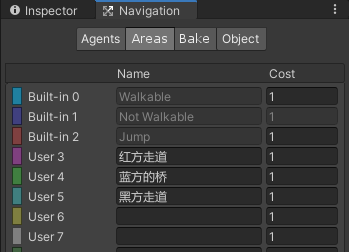
我们可以看到有三个区域是灰色的,代表这是内置的,不能修改,所有被烘焙的场景默认为Walkable(可行走的),后面有个数字Cost,这代表该区域行走的代价,如果AI有两个选择,那么它将会衡量两者,1是默认数字,2则代表着走这条路的代价是2倍距离,3则是3倍。
其次我们可以在Object选项卡的Navigation Area下拉框这里选择对象的区域类型,选中你想要修改区域类型的对象(比如是一座桥),然后点击下拉框,选择其中一个区域类型,这样这座桥的区域类型就被修改了,修改完成之后,一定要记得重新烘焙一下!
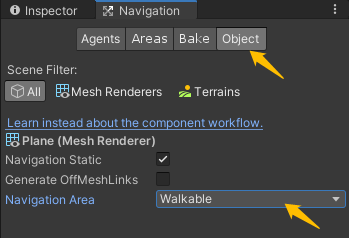
最后我们在NavMesh Agent组件的Area Mask参数这里选择当前AI只能走哪条路,比如给红方限定走Walkable、红方的路,这样红方就只能通过最左边的桥来抵达目标了。
内置类型说明
Walkable 是一种可行走的通用区域类型。
Not Walkable 是一种禁止导航的通用区域类型。如果希望将某个对象标记为障碍物,但不将导航网格置于其上,则可使用该类型。
Jump 是分配给所有自动生成的网格外链接的区域类型。
3.花费的代价
如图所示,黑色AI可以行走任何道路,但蓝色河流的代价是3(3代表河流这段距离对于AI来说是3倍的代价,肯定要比绕路长的多),所以黑色AI选择了绕路行驶。
三、Bake | 导航网格的烘焙参数详解
1.提要
这里的参数主要是控制导航网格的烘焙(废话),比如Max Slope,它用于控制当某个斜坡的坡度高于50度时,它将不被生成导航网格。甭管AI上不上的去,这里直接从根本条件否决了导航网格的生成。
所以,Bake是只根据这些参数来计算出一条可行的路径,也就是导航网格,至于AI如何选择,和这里没关系,这里只负责,根据这些条件,来生成可行路径(导航网格)
不理解的打开引擎,一个个参数修改着试试看,就理解了。
2.参数说明
| 参数 | 描述 |
|---|---|
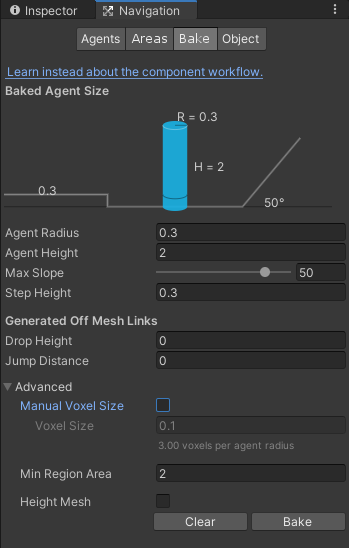
| Agent Radius | 假定AI的半径,具体自己试试看,不知道该怎么解释QAQ |
| Agent Height | 假定AI的高度,比如AI高2米,其中有个桥洞,1.9米,那么桥洞位置将不被生成导航网格 |
| Max Slope | 假定AI最大爬坡坡度,高于该坡度的斜坡不生成导航网格 |
| Step Height | 假定AI最高可跨越的台阶高度,高于该台阶将不生成导航网格连接面 |
| Manual Voxel Size | 是否手动输入值来控制烘焙精细度 |
| Voxel Size | 精细度,牵扯内容过多,咱也不会,不多讲,具体请参阅:https://docs.unity3d.com/cn/2020.2/Manual/nav-AdvancedSettings.html |
| Min Region Area | 剔除未连接的小型导航网格区域。表面积小于该值的导航网格区域将被移除。 |
| Height Mesh | 下面单独讲 |
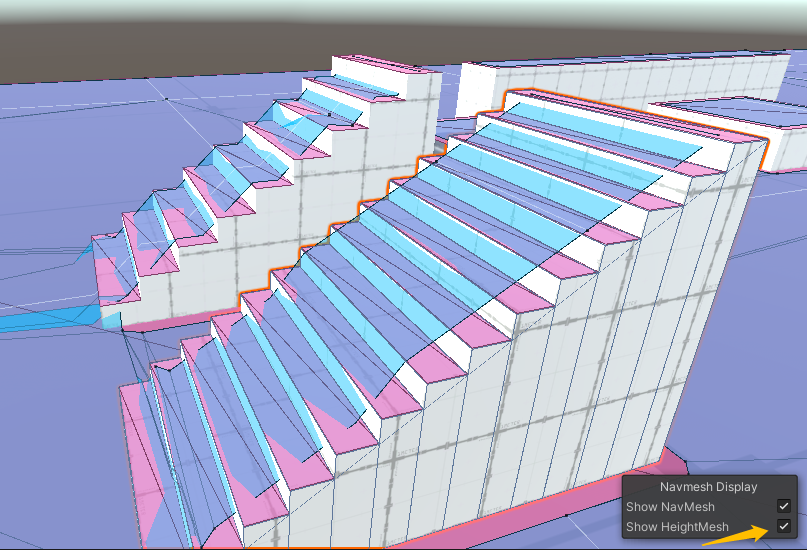
Height Mesh参数
由于导航网格是可行走空间的近似形状,因此在构建导航网格时会使某些特征扁平化(例如,楼梯可能在导航网格中显示为斜坡)。
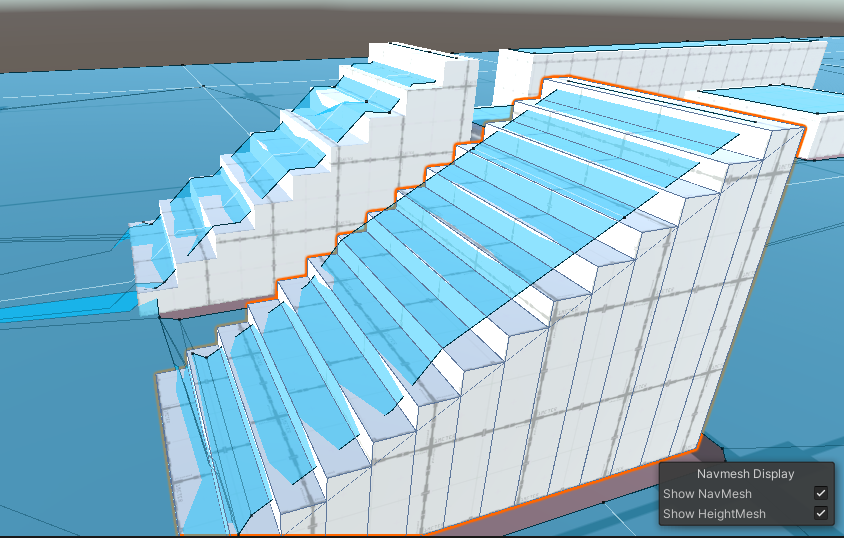
如果游戏需要更加准确,则应在烘焙导航网格时启用Height Mesh构建。请注意,构建高度网格将在运行时占用内存和处理资源,并需要稍微更长一点的时间来烘焙导航网格。(注意勾选 Show HeightMesh)
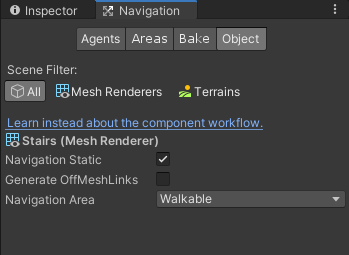
四、Object | 设置导航网格的外链接、区域
这里的内容不多,主要分成两段,一个是自动设置外链接,还有一个区域设置。
1.自动设置外链接 | Generate OffMeshLinks
该参数用于自动设置导航网格的外链接,只有勾选了此选项才会自动设置,且与Bake选项卡中的两个参数相关。
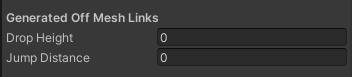
Drop Height:自动生成的最大高度限制(0则禁用生成)
Jump Distance:自动生成外链接的最远距离限制(0则禁用生成)
这个和Off Mesh Link网格外链接组件差不多,只不过这个是自动生成,更加方便,但也更加难以控制,各位读者按需使用即可
2.区域设置
有关Navigation Area参数,请参阅本篇第二章【Areas | 区域与花费的代价】第二小节内容。
五、总结和参考资料
1.总结
- Agents管理控制寻路AI的类型数据,当前版本无效
- Areas用于管理AI寻路的区域与代价
- 可通过NavMesh Agent的Area Mask参数,来控制当前AI寻路区域
- 可通过Object的Navigation Area参数,来控制当前区域的区域类型
- 通过Cost参数来控制区域代价,3则代表3倍距离
- Bake控制导航网格的烘焙,通过预先设置的条件来控制
- 烘焙的对象必须是Navigation Static,否则AI将无视该对象
- 一旦做出任意修改,就必须重新烘焙一遍
- 只对静态生效,若想要实现动态烘焙请使用NavMesh Obstacle组件
- Object控制当前选择对象
- 是否是静态Navigation
- 是否可自动生成外链接
- 区域类型
2.参考资料
[1].Unity官方.导航系统的内部工作原理
[2].Unity官方.高级导航网格烘焙设置
[3].Unity官方.导航区域和成本
[4].Unity官方.自动构建网格外链接
[5].Joe_Game.Unity之网格导航
[6].无法停止奔跑的马.Unity导航网格自动寻路系列——哔哩哔哩