一,需求
实现一个web端地面站,对apm/px4 无人机进行控制
二,架构
(1),UAV上挂在一个机载控制端,以树莓派为例,部署一个机载控制程序,负责将mavlink与web端进行数据和指令的转发。
(2),机载控制程序与web端通过webscoket进行长连接。
(3),机载控制程序 利用MAVSDK通过串口与飞控进行通信。
(4),web端 采用高德地图进行飞机位置和航点显示,和航线任务的创建。

三,机载控制程序
两个 线程,分别为mavlink数据收发,web端数据收发,主要工作就是在这两种数据之间进行格式的转换
四,web端地面站
纯html css 开发
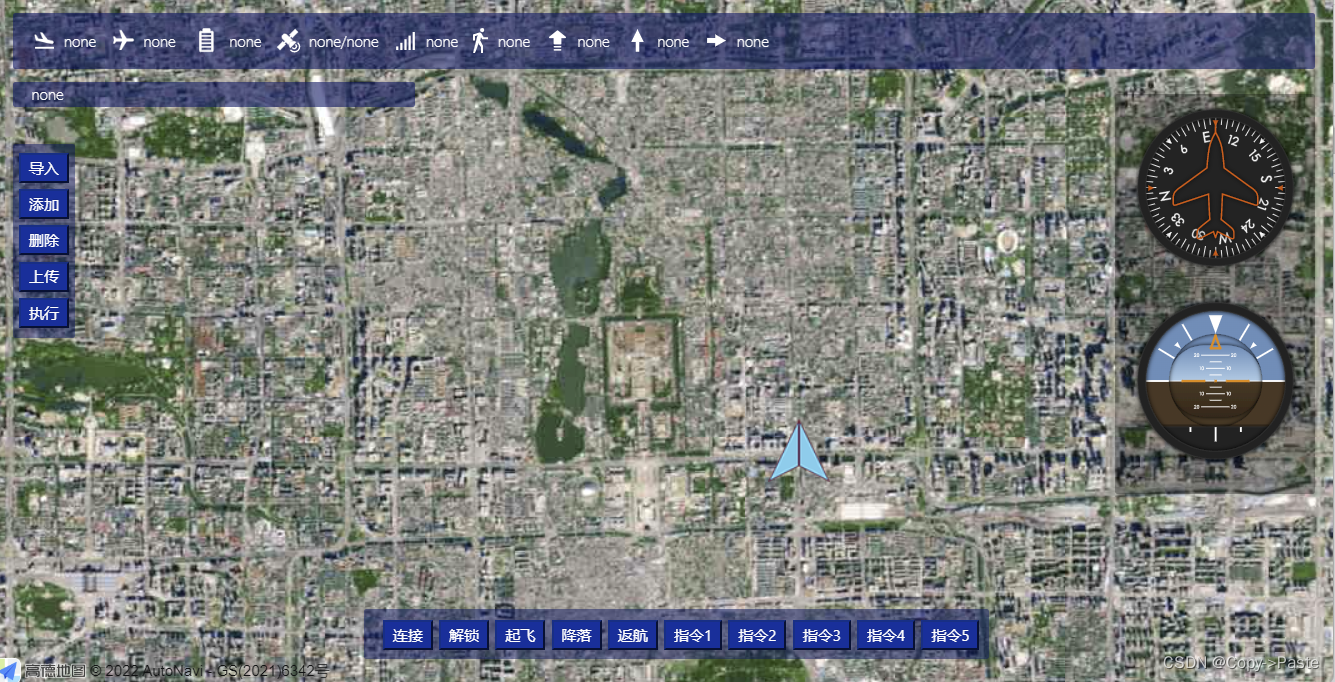
五,注意事项
(1),高德地图 上在绘制飞机位置时 需要进行坐标系转换,84转火星。同样在获取航点时也要反向转换
(2),更新页面时,本项目没有使用vue框架,用了一个定时器 进行定时更新UI数据,这样更流畅一些。
/
第二版 修改完毕,用了Vue框架和element ui
