此项目直接调用zed相机实现三维测距,无需标定,相关内容如下:
1. yolov5 + 双目测距(标定测距)
2. yolov5直接调用zed相机实现三维测距
3. 具体实现效果已在哔哩哔哩发布,点击此链接跳转
下载链接1:https://download.csdn.net/download/qq_45077760/87647999(点击跳转CSDN)
下载链接2:https://github.com/up-up-up-up/zed-v4(点击跳转github)
相关配置
python==3.7
Windows系统
pycharm平台
zed api(zed api配置步骤)
1.首先加载模型
config_path = "yolov4-tiny.cfg"
weight_path = "yolov4-tiny.weights"
meta_path = "coco.names"
svo_path = None
zed_id = 0
help_str = 'zed_yolo.py -c <config> -w <weight> -m <meta> -s <svo_file> -z <zed_id>'
try:
opts, args = getopt.getopt(
argv, "hc:w:m:s:z:", ["config=", "weight=", "meta=", "svo_file=", "zed_id="])
except getopt.GetoptError:
log.exception(help_str)
sys.exit(2)
for opt, arg in opts:
if opt == '-h':
log.info(help_str)
sys.exit()
elif opt in ("-c", "--config"):
config_path = arg
elif opt in ("-w", "--weight"):
weight_path = arg
elif opt in ("-m", "--meta"):
meta_path = arg
elif opt in ("-s", "--svo_file"):
svo_path = arg
elif opt in ("-z", "--zed_id"):
zed_id = int(arg)
weightsPath_tiny = weight_path
configPath_tiny = config_path
net = cv2.dnn.readNet(weightsPath_tiny, configPath_tiny)
net.setPreferableBackend(cv2.dnn.DNN_BACKEND_CUDA)
net.setPreferableTarget(cv2.dnn.DNN_TARGET_CUDA_FP16)
model = cv2.dnn_DetectionModel(net)
2.打开zed相机并配置
zed = sl.Camera()
# Set configuration parameters
input_type = sl.InputType()
init = sl.InitParameters(input_t=input_type)
init.camera_resolution = sl.RESOLUTION.HD720
init.depth_mode = sl.DEPTH_MODE.PERFORMANCE
init.coordinate_units = sl.UNIT.MILLIMETER
# Open the camera
err = zed.open(init)
if err != sl.ERROR_CODE.SUCCESS:
print(repr(err))
zed.close()
exit(1)
# Set runtime parameters after opening the camera
runtime = sl.RuntimeParameters()
runtime.sensing_mode = sl.SENSING_MODE.STANDARD
# Prepare new image size to retrieve half-resolution images
image_size = zed.get_camera_information().camera_resolution
image_size.width = image_size.width
image_size.height = image_size.height
# Declare your sl.Mat matrices
image_zed = sl.Mat(image_size.width, image_size.height, sl.MAT_TYPE.U8_C4)
disparity = sl.Mat() # 视差值
dep = sl.Mat() # 深度图
depth_image_zed = sl.Mat(image_size.width, image_size.height, sl.MAT_TYPE.U8_C4)
point_cloud = sl.Mat()
3.进行图像处理
def YOLOv4_video(pred_image):
model.setInputParams(size=(416, 416), scale=1 / 255, swapRB=True)
image_test = cv2.cvtColor(pred_image, cv2.COLOR_RGBA2RGB)
image = image_test.copy()
print('image', image.shape)
confThreshold = 0.5
nmsThreshold = 0.4
classes, confidences, boxes = model.detect(image, confThreshold, nmsThreshold)
return classes, confidences, boxes
while (exit_flag == True):
err = zed.grab(runtime)
if err == sl.ERROR_CODE.SUCCESS:
i = 0
# Retrieve the left image, depth image in the half-resolution
zed.retrieve_image(image_zed, sl.VIEW.LEFT, sl.MEM.CPU, image_size)
zed.retrieve_image(depth_image_zed, sl.VIEW.DEPTH, sl.MEM.CPU, image_size)
# 获取视差值
zed.retrieve_measure(disparity, sl.MEASURE.DISPARITY, sl.MEM.CPU)
dis_map = disparity.get_data()
zed.retrieve_image(dep, sl.VIEW.DEPTH) # 深度图
depth_map = depth_image_zed.get_data()
dep_map = dep.get_data()
# Retrieve the RGBA point cloud in half resolution
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, image_size)
point_map = point_cloud.get_data()
# Get and print distance value in mm at the center of the image
# We measure the distance camera - object using Euclidean distance
# To recover data from sl.Mat to use it with opencv, use the get_data() method
# It returns a numpy array that can be used as a matrix with opencv
image_ocv = image_zed.get_data()
# depth_image_ocv = depth_image_zed.get_data()
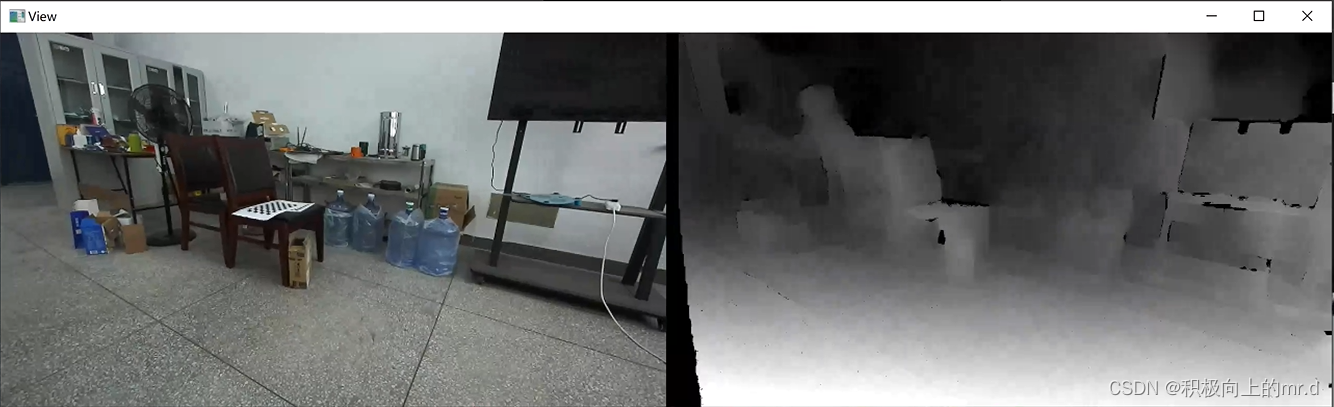
view = np.concatenate((cv2.resize(image_ocv, (640, 360)), cv2.resize(dep_map, (640, 360))), axis=1)
cv2.imshow("View", view)
key = cv2.waitKey(1)
if key & 0xFF == 27: # esc退出
break
if key & 0xFF == ord('s'): # 图像保存
savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹
cv2.imwrite(savePath, view)
i = i + 1
classes, confidences, boxes = YOLOv4_video(image_ocv)
for cl, score, (left, top, width, height) in zip(classes, confidences, boxes):
start_pooint = (int(left), int(top))
end_point = (int(left + width), int(top + height))
x = int(left + width / 2)
y = int(top + height / 2)
color = COLORS[0]
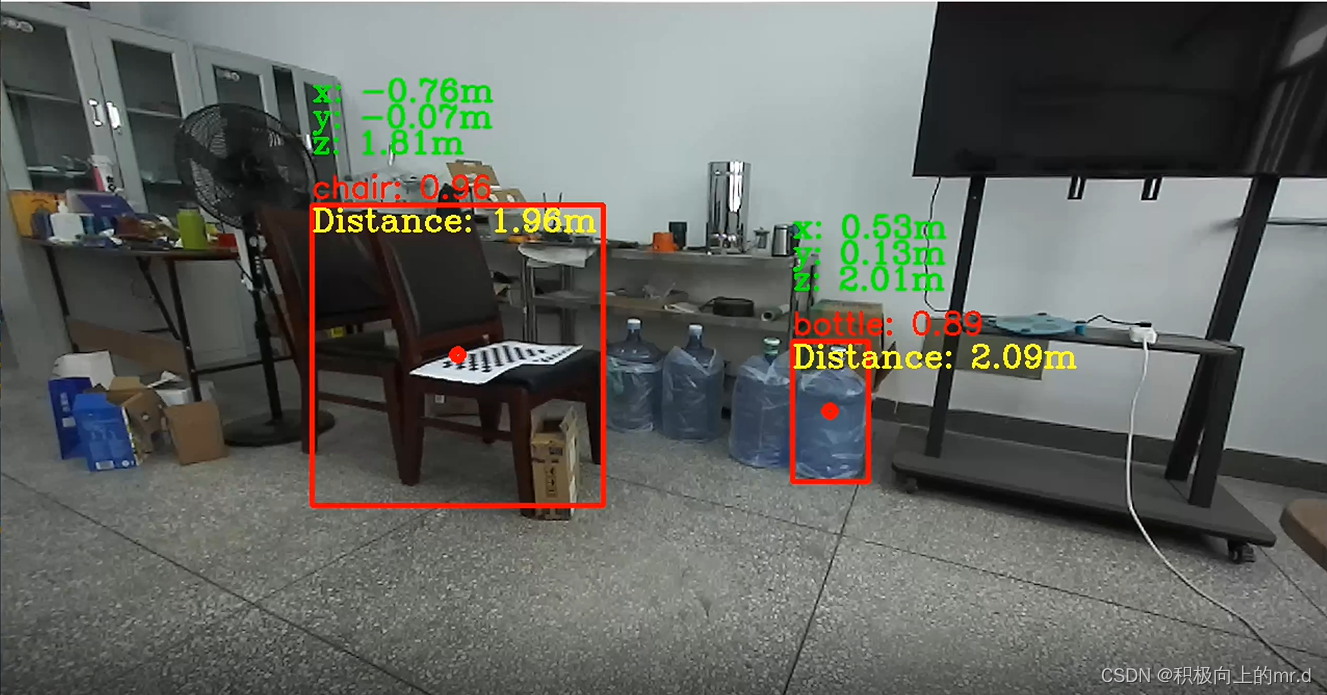
img = cv2.rectangle(image_ocv, start_pooint, end_point, color, 3)
img = cv2.circle(img, (x, y), 5, [0, 0, 255], 5)
text = f'{
LABELS[cl]}: {
score:0.2f}'
cv2.putText(img, text, (int(left), int(top - 7)), cv2.FONT_ITALIC, 1, COLORS[0], 2)
x = round(x)
y = round(y)
err, point_cloud_value = point_cloud.get_value(x, y)
distance = math.sqrt(
point_cloud_value[0] * point_cloud_value[0] + point_cloud_value[1] * point_cloud_value[1] +
point_cloud_value[2] * point_cloud_value[2])
print("Distance to Camera at (class : {0}, score : {1:0.2f}): distance : {2:0.2f} mm".format(LABELS[cl],
score,
distance),
end="\r")
cv2.putText(img, "Distance: " + str(round(distance / 1000, 2)) + 'm',
(int(left), int(top + 25)),
cv2.FONT_HERSHEY_COMPLEX, 1, COLORS[1], 2)
cv2.imshow("Image", img)
key = cv2.waitKey(2)
frame_count = frame_count + 1
if key & 0xFF == 27: # esc退出
break
if key & 0xFF == ord('s'): # 图像保存
savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹
cv2.imwrite(savePath, view)
i = i + 1
cv2.destroyAllWindows()
zed.close()
完整代码
import os
import sys
import numpy as np
import pyzed.sl as sl
import cv2
import math
import logging
import getopt
log = logging.getLogger(__name__)
logging.basicConfig(level=logging.INFO)
def main(argv):
global img
config_path = "yolov4-tiny.cfg"
weight_path = "yolov4-tiny.weights"
meta_path = "coco.names"
svo_path = None
zed_id = 0
help_str = 'zed_yolo.py -c <config> -w <weight> -m <meta> -s <svo_file> -z <zed_id>'
try:
opts, args = getopt.getopt(
argv, "hc:w:m:s:z:", ["config=", "weight=", "meta=", "svo_file=", "zed_id="])
except getopt.GetoptError:
log.exception(help_str)
sys.exit(2)
for opt, arg in opts:
if opt == '-h':
log.info(help_str)
sys.exit()
elif opt in ("-c", "--config"):
config_path = arg
elif opt in ("-w", "--weight"):
weight_path = arg
elif opt in ("-m", "--meta"):
meta_path = arg
elif opt in ("-s", "--svo_file"):
svo_path = arg
elif opt in ("-z", "--zed_id"):
zed_id = int(arg)
# Set configuration parameters
input_type = sl.InputType()
if svo_path is not None:
log.info("SVO file : " + svo_path)
input_type.set_from_svo_file(svo_path)
else:
# Launch camera by id
input_type.set_from_camera_id(zed_id)
# Create a ZED camera object
zed = sl.Camera()
# Set configuration parameters
input_type = sl.InputType()
init = sl.InitParameters(input_t=input_type)
init.camera_resolution = sl.RESOLUTION.HD720
init.depth_mode = sl.DEPTH_MODE.PERFORMANCE
init.coordinate_units = sl.UNIT.MILLIMETER
# Open the camera
err = zed.open(init)
if err != sl.ERROR_CODE.SUCCESS:
print(repr(err))
zed.close()
exit(1)
# Set runtime parameters after opening the camera
runtime = sl.RuntimeParameters()
runtime.sensing_mode = sl.SENSING_MODE.STANDARD
# Prepare new image size to retrieve half-resolution images
image_size = zed.get_camera_information().camera_resolution
image_size.width = image_size.width
image_size.height = image_size.height
# Declare your sl.Mat matrices
image_zed = sl.Mat(image_size.width, image_size.height, sl.MAT_TYPE.U8_C4)
disparity = sl.Mat() # 视差值
dep = sl.Mat() # 深度图
depth_image_zed = sl.Mat(image_size.width, image_size.height, sl.MAT_TYPE.U8_C4)
point_cloud = sl.Mat()
# ======================================= yolov4 video test et ============================================
weightsPath_tiny = weight_path
configPath_tiny = config_path
net = cv2.dnn.readNet(weightsPath_tiny, configPath_tiny)
net.setPreferableBackend(cv2.dnn.DNN_BACKEND_CUDA)
net.setPreferableTarget(cv2.dnn.DNN_TARGET_CUDA_FP16)
model = cv2.dnn_DetectionModel(net)
def YOLOv4_video(pred_image):
model.setInputParams(size=(416, 416), scale=1 / 255, swapRB=True)
image_test = cv2.cvtColor(pred_image, cv2.COLOR_RGBA2RGB)
image = image_test.copy()
print('image', image.shape)
confThreshold = 0.5
nmsThreshold = 0.4
classes, confidences, boxes = model.detect(image, confThreshold, nmsThreshold)
return classes, confidences, boxes
LABELS = []
with open(meta_path, 'r') as f:
LABELS = [cname.strip() for cname in f.readlines()]
COLORS = [[0, 0, 255], [30, 255, 255], [0, 255, 0]]
frame_count = 0
exit_flag = True
while (exit_flag == True):
err = zed.grab(runtime)
if err == sl.ERROR_CODE.SUCCESS:
i = 0
# Retrieve the left image, depth image in the half-resolution
zed.retrieve_image(image_zed, sl.VIEW.LEFT, sl.MEM.CPU, image_size)
zed.retrieve_image(depth_image_zed, sl.VIEW.DEPTH, sl.MEM.CPU, image_size)
# 获取视差值
zed.retrieve_measure(disparity, sl.MEASURE.DISPARITY, sl.MEM.CPU)
dis_map = disparity.get_data()
zed.retrieve_image(dep, sl.VIEW.DEPTH) # 深度图
depth_map = depth_image_zed.get_data()
dep_map = dep.get_data()
# Retrieve the RGBA point cloud in half resolution
zed.retrieve_measure(point_cloud, sl.MEASURE.XYZRGBA, sl.MEM.CPU, image_size)
point_map = point_cloud.get_data()
image_ocv = image_zed.get_data()
# depth_image_ocv = depth_image_zed.get_data()
view = np.concatenate((cv2.resize(image_ocv, (640, 360)), cv2.resize(dep_map, (640, 360))), axis=1)
cv2.imshow("View", view)
key = cv2.waitKey(1)
if key & 0xFF == 27: # esc退出
break
if key & 0xFF == ord('s'): # 图像保存
savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹
cv2.imwrite(savePath, view)
i = i + 1
classes, confidences, boxes = YOLOv4_video(image_ocv)
for cl, score, (left, top, width, height) in zip(classes, confidences, boxes):
start_pooint = (int(left), int(top))
end_point = (int(left + width), int(top + height))
x = int(left + width / 2)
y = int(top + height / 2)
color = COLORS[0]
img = cv2.rectangle(image_ocv, start_pooint, end_point, color, 3)
img = cv2.circle(img, (x, y), 5, [0, 0, 255], 5)
text = f'{
LABELS[cl]}: {
score:0.2f}'
cv2.putText(img, text, (int(left), int(top - 7)), cv2.FONT_ITALIC, 1, COLORS[0], 2)
x = round(x)
y = round(y)
err, point_cloud_value = point_cloud.get_value(x, y)
distance = math.sqrt(
point_cloud_value[0] * point_cloud_value[0] + point_cloud_value[1] * point_cloud_value[1] +
point_cloud_value[2] * point_cloud_value[2])
print("Distance to Camera at (class : {0}, score : {1:0.2f}): distance : {2:0.2f} mm".format(LABELS[cl],
score,
distance),
end="\r")
cv2.putText(img, "Distance: " + str(round(distance / 1000, 2)) + 'm',
(int(left), int(top + 25)),
cv2.FONT_HERSHEY_COMPLEX, 1, COLORS[1], 2)
cv2.imshow("Image", img)
key = cv2.waitKey(2)
frame_count = frame_count + 1
if key & 0xFF == 27: # esc退出
break
if key & 0xFF == ord('s'): # 图像保存
savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹
cv2.imwrite(savePath, view)
i = i + 1
cv2.destroyAllWindows()
zed.close()
print("\nFINISH")
if __name__ == "__main__":
main(sys.argv[1:])
测距图片挺准确的,因为免去了棋盘格标定,直接调用的zed内部参数,具体效果图看深度图可以看出来,可以对比标定和未标定的效果
深度图(将左相机画面和深度图做了拼接)