前言
1.在当下的环境上,短视频已是生活的常态,但这是很容易就侵犯别人肖像权,好多视频都会在后期给不相关的人打上码,这里是基于yolov5的人脸检测实现人脸自动打码功能。
2.开发环境是win10,显卡RTX3080,cuda10.2,cudnn7.1,OpenCV4.5,NCNN,IDE 是Vs2019。
一、人脸检测
1.首先最主要的一步是肯定是先检测到当前图像是否存在人脸,这个属于人脸检测的范围,目前有很多开源的人脸检测算法和模型,OpenCV本身也带有人脸检测的算法,但了帧率跟得上,这里使用更轻快些的yolov5。
2.实现代码
#ifndef YOLOFACE_H
#define YOLOFACE_H
#include <opencv2/core/core.hpp>
#include <opencv2/opencv.hpp>
#include <ncnn/net.h>
struct Object
{
cv::Rect rect;
int label;
float prob;
std::vector<cv::Point2f> pts;
float live;
};
class YoloFace
{
public:
YoloFace();
int loadModel(std::string model, bool use_gpu = true);
int detection(const cv::Mat& rgb, std::vector<Object>& objects, float prob_threshold = 0.25f, float nms_threshold = 0.45f);
int drawFace(cv::Mat& rgb,cv::Mat &cv_dst, std::vector<Object>& objects);
private:
ncnn::Net face_net;
int target_size = 640;
const float norm_vals[3] = {
1 / 255.f, 1 / 255.f, 1 / 255.f };
int image_w;
int image_h;
int in_w;
int in_h;
};
#endif // NANODET_H
#include "yoloface.h"
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#define clip(x, y) (x < 0 ? 0 : (x > y ? y : x))
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static void generate_proposals(const ncnn::Mat& anchors, int stride, const ncnn::Mat& in_pad, const ncnn::Mat& feat_blob, float prob_threshold, std::vector<Object>& objects)
{
const int num_grid = feat_blob.h;
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h)
{
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
}
else
{
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = feat_blob.w - 5-10;
const int num_anchors = anchors.w / 2;
for (int q = 0; q < num_anchors; q++)
{
const float anchor_w = anchors[q * 2];
const float anchor_h = anchors[q * 2 + 1];
const ncnn::Mat feat = feat_blob.channel(q);
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const float* featptr = feat.row(i * num_grid_x + j);
// find class index with max class score
int class_index = 0;
float class_score = -FLT_MAX;
for (int k = 0; k < num_class; k++)
{
float score = featptr[5 +10+ k];
if (score > class_score)
{
class_index = k;
class_score = score;
}
}
float box_score = featptr[4];
float confidence = sigmoid(box_score); //* sigmoid(class_score);
if (confidence >= prob_threshold)
{
// yolov5/models/yolo.py Detect forward
// y = x[i].sigmoid()
// y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i].to(x[i].device)) * self.stride[i] # xy
// y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
float dx = sigmoid(featptr[0]);
float dy = sigmoid(featptr[1]);
float dw = sigmoid(featptr[2]);
float dh = sigmoid(featptr[3]);
float pb_cx = (dx * 2.f - 0.5f + j) * stride;
float pb_cy = (dy * 2.f - 0.5f + i) * stride;
float pb_w = pow(dw * 2.f, 2) * anchor_w;
float pb_h = pow(dh * 2.f, 2) * anchor_h;
float x0 = pb_cx - pb_w * 0.5f;
float y0 = pb_cy - pb_h * 0.5f;
float x1 = pb_cx + pb_w * 0.5f;
float y1 = pb_cy + pb_h * 0.5f;
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = class_index;
obj.prob = confidence;
for (int l = 0; l < 5; l++)
{
float x = featptr[2 * l + 5] * anchor_w + j * stride;
float y = featptr[2 * l + 1 + 5] * anchor_h + i * stride;
obj.pts.push_back(cv::Point2f(x, y));
}
objects.push_back(obj);
}
}
}
}
}
YoloFace::YoloFace()
{
}
int YoloFace::loadModel(std::string model, bool use_gpu)
{
bool has_gpu = false;
face_net.clear();
face_net.opt = ncnn::Option();
#if NCNN_VULKAN
ncnn::create_gpu_instance();
has_gpu = ncnn::get_gpu_count() > 0;
#endif
bool to_use_gpu = has_gpu && use_gpu;
face_net.opt.use_vulkan_compute = to_use_gpu;
face_net.load_param((model+".param").c_str());
face_net.load_model((model + ".bin").c_str());
return 0;
}
int YoloFace::detection(const cv::Mat& rgb, std::vector<Object>& objects, float prob_threshold, float nms_threshold)
{
int img_w = rgb.cols;
int img_h = rgb.rows;
// letterbox pad to multiple of 32
int w = img_w;
int h = img_h;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(rgb.data, ncnn::Mat::PIXEL_RGB, img_w, img_h, w, h);
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 114.f);
in_pad.substract_mean_normalize(0, norm_vals);
ncnn::Extractor ex = face_net.create_extractor();
ex.input("data", in_pad);
std::vector<Object> proposals;
// anchor setting from yolov5/models/yolov5s.yaml
// stride 8
{
ncnn::Mat out;
ex.extract("981", out);
ncnn::Mat anchors(6);
anchors[0] = 4.f;
anchors[1] = 5.f;
anchors[2] = 8.f;
anchors[3] = 10.f;
anchors[4] = 13.f;
anchors[5] = 16.f;
std::vector<Object> objects8;
generate_proposals(anchors, 8, in_pad, out, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat out;
ex.extract("983", out);
ncnn::Mat anchors(6);
anchors[0] = 23.f;
anchors[1] = 29.f;
anchors[2] = 43.f;
anchors[3] = 55.f;
anchors[4] = 73.f;
anchors[5] = 105.f;
std::vector<Object> objects16;
generate_proposals(anchors, 16, in_pad, out, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat out;
ex.extract("985", out);
ncnn::Mat anchors(6);
anchors[0] = 146.f;
anchors[1] = 217.f;
anchors[2] = 231.f;
anchors[3] = 300.f;
anchors[4] = 335.f;
anchors[5] = 433.f;
std::vector<Object> objects32;
generate_proposals(anchors, 32, in_pad, out, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
for (int j = 0; j < objects[i].pts.size(); j++)
{
float ptx = (objects[i].pts[j].x - (wpad / 2)) / scale;
float pty = (objects[i].pts[j].y - (hpad / 2)) / scale;
objects[i].pts[j] = cv::Point2f(ptx, pty);
}
// clip
x0 = std::max(std::min(x0, (float)(img_w - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(img_h - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(img_w - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(img_h - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
int YoloFace::drawFace(cv::Mat& rgb,cv::Mat &cv_dst, std::vector<Object>& objects)
{
cv_dst = rgb.clone();
static const unsigned char colors[19][3] = {
{
54, 67, 244},
{
99, 30, 233},
{
176, 39, 156},
{
183, 58, 103},
{
181, 81, 63},
{
243, 150, 33},
{
244, 169, 3},
{
212, 188, 0},
{
136, 150, 0},
{
80, 175, 76},
{
74, 195, 139},
{
57, 220, 205},
{
59, 235, 255},
{
7, 193, 255},
{
0, 152, 255},
{
34, 87, 255},
{
72, 85, 121},
{
158, 158, 158},
{
139, 125, 96}
};
int color_index = 0;
for (size_t i = 0; i < objects.size(); i++)
{
Object& obj = objects[i];
const unsigned char* color = colors[color_index % 19];
color_index++;
cv::Scalar cc(color[0], color[1], color[2]);
cv::rectangle(cv_dst,obj.rect, cc, 2);
char text[256];
sprintf(text, "Face = %.1f%%", obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > rgb.cols)
x = rgb.cols - label_size.width;
cv::rectangle(cv_dst, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)), cc, -1);
cv::Scalar textcc = (color[0] + color[1] + color[2] >= 381) ? cv::Scalar(0, 0, 0) : cv::Scalar(255, 255, 255);
cv::putText(cv_dst, text, cv::Point(x, y + label_size.height), cv::FONT_HERSHEY_SIMPLEX, 0.5, textcc, 1);
for (int j = 0; j < obj.pts.size(); j++)
{
cv::circle(cv_dst, obj.pts[j], 2, cv::Scalar(0, 255, 0), -1);
}
}
return 0;
}
2.人脸检测效果
二、人脸打码
代码:
#include <opencv2/opencv.hpp>
#include "yoloface.h"
#include <opencv2/video/video.hpp>
cv::Rect targetResize(const cv::Mat& cv_src, cv::Mat& cv_dst, int target_w, int target__h);
bool generate_mosaic(cv::Mat& src, std::vector<Object>& objects)
{
if (objects.empty())return false;
int step = 10;//步长
for (int t = 0; t < objects.size(); t++)
{
int x = objects[t].rect.tl().x;
int y = objects[t].rect.tl().y;
int width = objects[t].rect.width;
int height = objects[t].rect.height;
for (int i = y; i < (y + height); i += step)
{
for (int j = x; j < (x + width); j += step)
{
for (int k = i; k < (step + i); k++)
{
for (int m = j; m < (step + j); m++)
{
for (int c = 0; c < 3; c++)
{
src.at<cv::Vec3b>(k, m)[c] = src.at<cv::Vec3b>(i, j)[c];
}
}
}
}
}
}
return true;
}
int main(void)
{
YoloFace yolo_face;
//加载人脸检测模型
yolo_face.loadModel("models/face/face_lite");
cv::VideoCapture cap;
//打开摄像头或者是输入视频
//cap.open(0);
cap.open("222.mp4");
if (!cap.isOpened())
{
return 0;
}
cv::Mat cv_src;
while (1)
{
cap >> cv_src;
if (cv_src.empty())
{
break;
}
std::vector<Object> objects;
//图像边界扩展,这步是为了提高精度
cv::Mat cv_target;
// cv::Rect rect = targetResize(cv_src, cv_target, target_w, target_h);
//人脸检测
yolo_face.detection(cv_src, objects);
cv::Mat cv_dst;
generate_mosaic(cv_src, objects);
//yolo_face.drawFace(cv_src, cv_dst, objects);
cv::namedWindow("face", 0);
cv::imshow("face", cv_dst);
cv::waitKey(20);
}
cap.release();
return 0;
}
cv::Rect targetResize(const cv::Mat& cv_src, cv::Mat& cv_dst, int target_w, int target_h)
{
float s;
if (cv_src.cols > cv_src.rows)
{
s = float(target_w) / cv_src.cols;
}
else
{
s = float(target_h) / cv_src.rows;
}
float w = cv_src.cols * s;
float h = cv_src.rows * s;
int w_p = (target_w - w) / 2;
int h_p = (target_h - h) / 2;
cv::Mat cv_size;
cv::resize(cv_src, cv_size, cv::Size(w, h));
cv::copyMakeBorder(cv_size, cv_dst, h_p, h_p, w_p, w_p, cv::BORDER_CONSTANT, 114.f);
return cv::Rect(w_p, h_p, cv_size.cols, cv_size.rows);
}
打码效果:

三、源码
1.源码地址:https://mp.csdn.net/mp_download/manage/download/UpDetailed
2.源码配置方法
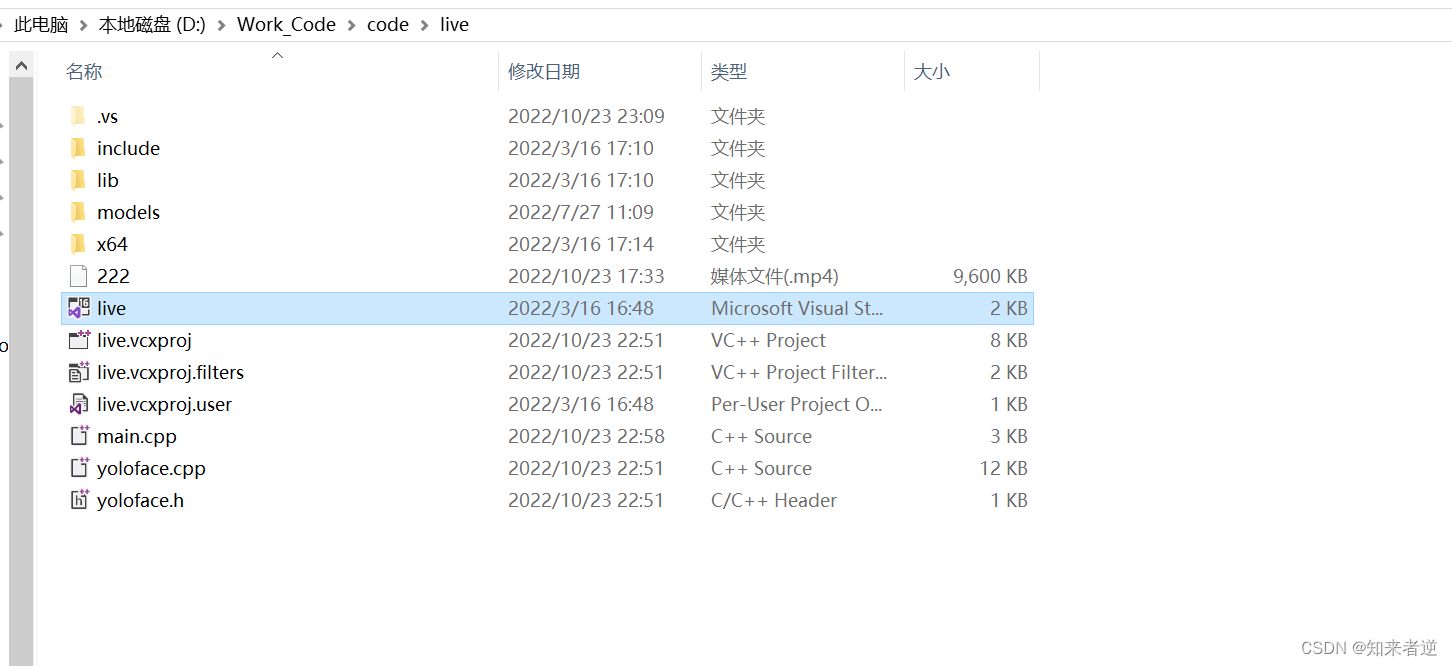
1.文件目录
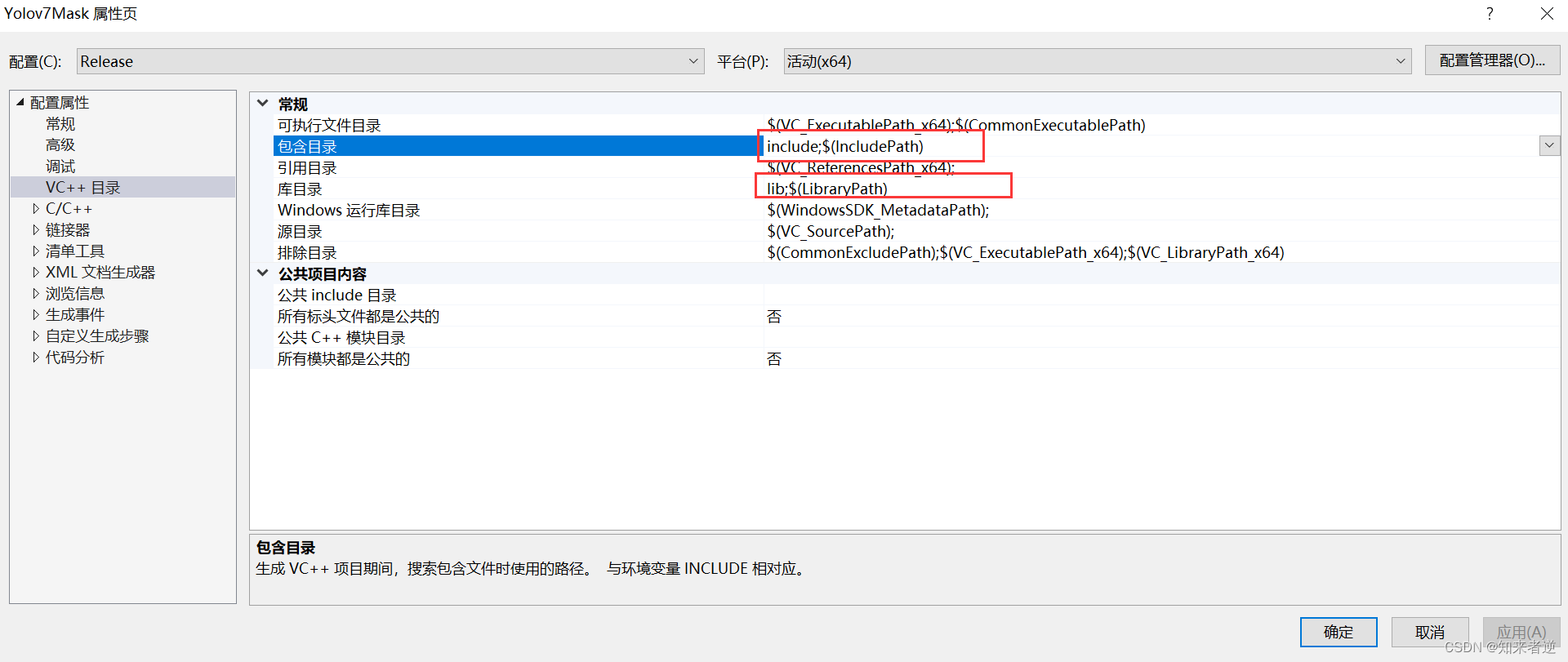
2.配置include和lib路径
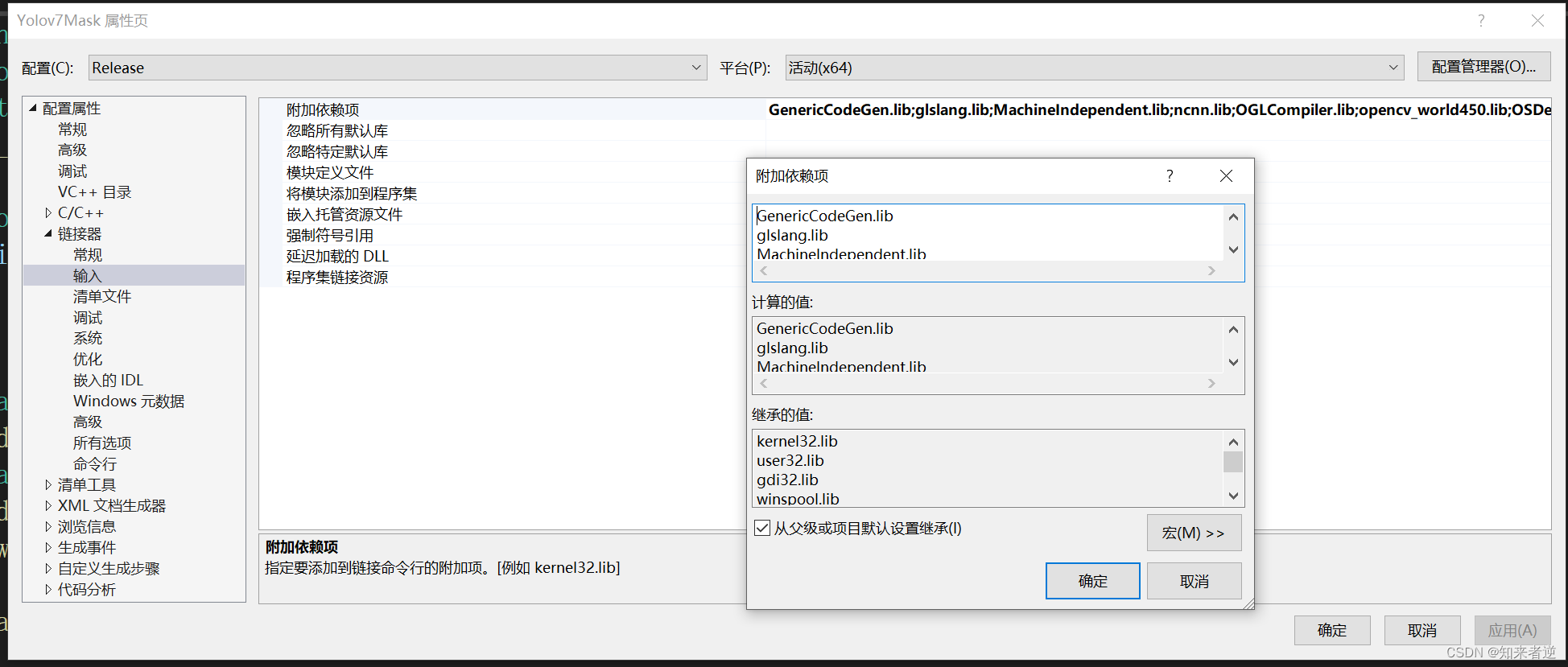
3.添加lib名,就是源码目录里面所有点lib后缀的名称。
4.IDE的配置