嵌入式开发板RS485多节点串口编程——关节力矩传感器数据读取
最近学业繁忙,主要是准备找工作,有一段时间没分享了,今天给大家分享一下我最近利用TI AM4376开发板RS485串口读取两个关节力矩传感器的数据,我们这个关节力矩传感器用在外骨骼机器人上。后面我也会将我最近找工作的经历分享给大家,主要包括笔试、面试的准备,希望能给正在准备找工作的应届生一些帮助。
一、RS485通信协议原理
之前面试国电南京自动化时,面试官就问了有关串口和总线通信协议的问题,所以如果你是打算找嵌入式相关的工作,这方面一定要准备充分。今天我们先详细介绍一下RS485的通信协议。
1、RS485与RS232的异同
首先是逻辑电平的不同,RS232的逻辑正电平是-3-15,逻辑负电平为+3+15,而RS485的逻辑正电平+2+6V,,负电平在-2-6V,和RS232是相反的。
其次是工作方式不同,RS232是全双工,发送和接收可以同时进行,而RS485是半双工,发送和接收不能同时进行。
2、RS485可以挂载多少个节点
RS485可以外接最多32个设备,CAN可以外接110个节点,传统RS232只允许一对一的通信,不过利用modbus协议可以外接多个设备,
二、关节力矩传感器
1、通讯机制
在RS485总线通讯网络中,上级系统为主设备(调度端),各力矩传感器为从设备(被调度端)。采用轮询应答通讯机制,即:由主设备向从设备发送命令帧,从设备收到与其ID相对应的指令后才能进行响应,并向主设备发送当前工作状态数据。从设备在没有收到主设备数据帧或ID不符的情况下维持当前状态不变。默认id:01
各力矩传感器的超时判断时间为主设备发出指令后0.5ms。
2、写设备地址
因为我们要与两个设备节点通信,所以要区分两个出厂设备,通过写设备地址通信协议,改变关节力矩传感器的设备地址,这样我们以后发送数据和接收数据的时候就会以设备地址为校验,01设备只接收地址位为01的数据,02设备只接收地址位位02的数据。
下表展示的就是写地址指令,我们只需要修改第八个字节,即设置地址字节,一个设备设置为01,也就是默认的,另一个设置成02,这样就区分了两个设备。
| 字节 序号 | 信号名称 | 字长 | 数据类型 | 内容 | 备注 |
|---|---|---|---|---|---|
| 1 | 帧头 | 8位 | 无符号整型 | AAH | |
| 2 | 帧头 | 8位 | 无符号整型 | BBH | |
| 3 | 帧头 | 8位 | 无符号整型 | CCH | |
| 4 | 帧头 | 8位 | 无符号整型 | DDH | |
| 5 | 命令标识 | 8位 | 无符号整型 | 01H | 01H工作指令 |
| 6 | 数据长度 | 8位 | 无符号整型 | 0EH | 1个字节 |
| 7 | 传感器地址 | 8位 | 无符号整型 | [0,FFH] | 原始设备ID |
| 8 | 设置地址 | 8位 | 无符号整型 | [0,FFH] | 更新后设备ID |
| 9 | CRC16校验 | 8位 | 无符号整型 | [0,FFH] | CRC16高位 |
| 10 | CRC16校验 | 8位 | 无符号整型 | [0,FFH] | CRC16低位 |
| 11 | 帧尾 | 8位 | 无符号整型 | DDH | |
| 12 | 帧尾 | 8位 | 无符号整型 | CCH | |
| 13 | 帧尾 | 8位 | 无符号整型 | BBH | |
| 14 | 帧尾 | 8位 | 无符号整型 | AAH |
3、力矩值读取
下表为力矩值读取协议:
| 字节序号 | 信号名称 | 字长 | 数据类型 | 内容 | 备注 |
|---|---|---|---|---|---|
| 1 | 帧头 | 8位 | 无符号整型 | AAH | |
| 2 | 帧头 | 8位 | 无符号整型 | BBH | |
| 3 | 帧头 | 8位 | 无符号整型 | CCH | |
| 4 | 帧头 | 8位 | 无符号整型 | DDH | |
| 5 | 指令字 | 8位 | 无符号整型 | 03H | 03H—读取力矩值 |
| 6 | 数据长度 | 8位 | 无符号整型 | 0EH | 1个字节 |
| 7 | 设备ID | 8位 | 无符号整型 | [0,FFH] | |
| 8 | 保留位 | 8位 | 无符号整型 | [0,00H] | 保留 |
| 9 | CRC校验 | 8位 | 无符号整型 | [0,FFH] | CRC16高位 |
| 10 | CRC校验 | 8位 | 无符号整型 | [0,FFH] | CRC16低位 |
| 11 | 帧尾 | 8位 | 无符号整型 | DDH | |
| 12 | 帧尾 | 8位 | 无符号整型 | CCH | |
| 13 | 帧尾 | 8位 | 无符号整型 | BBH | |
| 14 | 帧尾 | 8位 | 无符号整型 | AAH |
根据上面我们设置的地址,我们要下发的指令即为:
static char byteSend1[14];
static char byteSend2[14];
byteSend1[0] = 0xAA;
byteSend1[1] = 0xBB;
byteSend1[2] = 0xCC;
byteSend1[3] = 0xDD;
byteSend1[4] = 0x03;
byteSend1[5] = 0x0E;
byteSend1[6] = 0x01;//关节1设备地址
byteSend1[7] = 0;
byteSend1[8] = 0xAE;
byteSend1[9] = 0xB3;
byteSend1[10] = 0xDD;
byteSend1[11] = 0xCC;
byteSend1[12] = 0xBB;
byteSend1[13] = 0xAA;
byteSend2[0] = 0xAA;
byteSend2[1] = 0xBB;
byteSend2[2] = 0xCC;
byteSend2[3] = 0xDD;
byteSend2[4] = 0x03;
byteSend2[5] = 0x0E;
byteSend2[6] = 0x02;//关节2设备地址
byteSend2[7] = 0;
byteSend2[8] = 0xA4;
byteSend2[9] = 0xB3;
byteSend2[10] = 0xDD;
byteSend2[11] = 0xCC;
byteSend2[12] = 0xBB;
byteSend2[13] = 0xAA;
4、力矩传感器数据读取
下表为力矩传感器返回的数据格式:
| 字节 序号 | 信号名称 | 标识 | 字长 | 数据类型 | 内容 | 单位 | LSB****接口当量 | 备注 |
|---|---|---|---|---|---|---|---|---|
| 8~9 | 传感器数据 | SNS_data | 16位 | 有符号浮点数(保留一位小数) | [-300,300] | Nm | 0.01 | 传感器输出范围为-300.0~300.0Nm |
举例:传感器返回数据:AA BB CC DD 33 0F 01 09 23 64 DD CC BB AA。AA BB CC DD帧头;0F 数据长度4位,为33 01 23 09;33读取力矩成功;01为传感器ID;09 23为力矩数据,高位在前低位在后,16位整形表示为0923H,转换为10进制为2339/10,力矩值为233.9Nm。传感器数据为F756时,高位在前低位在后,16位整形表示为F756H,转换为10进制为-2217/10,力矩值为-221.7Nm。
三、测试程序
因为整个代码比较多,这里我只将主程序中的指令下发和接收贴上来,完整的代码我会放在公众号中:河边小乌龟爬,回复<关节力矩传感器数据读取>即可获取。
这里为了为了清楚的表示下发和接收过程,我没有写成函数接口的形式,按照代码的可读性来说,这样的代码可读性较差,优化就交给你们了。
while (1)
{
while(flag == 0 && flag1 == 0){
if(i > 13){
flag = 1;
i = 0;
break;
}
context = byteSend[i];
iRet = write(fd, &context, sizeof(context));
i++;
}
bzero(r_buf, 15);
while(flag == 1&& flag1 == 0){
//读传感器发送过来的数据,并解析处理
if(j > 14){
flag = 0;
j = 0;
flag1 = 1;
break;
}
iRet = read(fd, &readtext, sizeof(readtext));
r_buf[j] = readtext;
//printf("read:%02x\n", r_buf[j]);
j++;
}
usleep(10000);
while(flag == 0 && flag1 == 1){
if(i > 13){
flag = 1;
i = 0;
break;
}
context = byteSend2[i];
iRet = write(fd, &context, sizeof(context));
i++;
}
bzero(r_buf2, 15);
while(flag == 1&& flag1 == 1){
//读传感器发送过来的数据,并解析处理
if(j > 14){
flag = 0;
j = 0;
flag1 = 0;
break;
}
iRet = read(fd, &readtext, sizeof(readtext));
r_buf2[j] = readtext;
//printf("read:%02x\n", r_buf[j]);
j++;
}
if(r_buf[0] == 0xAA && r_buf[1] == 0xBB){
printf("this joint 1 POS:%7.3f\n", ((float)((r_buf[7]<<8) | r_buf[8])/100));
}
if(r_buf2[0] == 0xAA && r_buf2[1] == 0xBB){
printf("this joint 2 POS:%7.3f\n", ((float)((r_buf2[7]<<8) | r_buf2[8])/100));
}
}
在ubantu中编译程序并下载到开发板中:

运行结果如下:
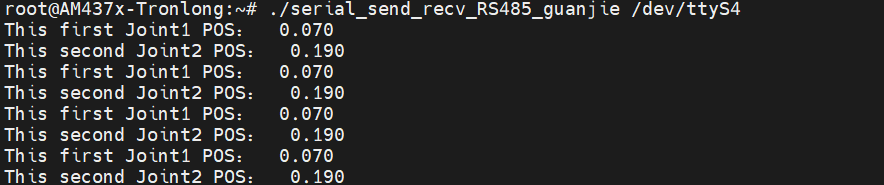
完整源码我放在公众号河边小乌龟爬中了,需要的自取,回复<关节力矩传感器数据读取>即可获得。
我是河边小乌龟爬,学习嵌入式软件开发路上的一名小学生,欢迎大家相互交流哇。公众号:河边小乌龟爬。