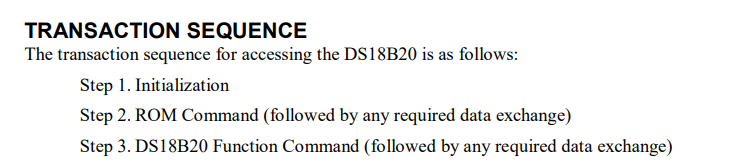
思路说明:先打开DS18B20数据手册查询到以下图片内容按照顺序一步一步驱动。

1.这个是DS18B20初始化的时序图,经过分析能得到以下代码(代码注释)。
void Init_DS18B20(void)
{
unsigned char t = 0;
DS_DIR_OUT(); //让GPIO口为推挽输出模式
GPIO_ResetBits(GPIOB,GPIO_Pin_9); //发送复位脉冲 ds18b20 DQ管脚接到单片机的PB9
delay_us(600); //延时(>480us)
GPIO_SetBits(GPIOB,GPIO_Pin_9); //拉高数据线
delay_us(55); //等待(15~60us)
DS_DIR_IN(); //配置GPIO口为浮空输入模式
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9) == SET) //等待拉低
{
delay_us(1);
t++;
if(t >= 240)//如果超过240us还是高电平 代表ds18b20没发数据回来 丢失连接了
return;
}
t = 0;
while(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9) == RESET) //等待拉高
{
delay_us(1);
t++;
if(t >= 240)//如果超过240us还是低电平 代表ds18b20没发数据回来 丢失连接了
return;
}
printf("温度初始化完成!"); //我的printf函数是跟串口结合了,用于看ds18b20是否初始化完成
}void DS_DIR_IN(void) //让PB9为浮空输入模式
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}
void DS_DIR_OUT(void) //让PB9为推挽输出模式
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}2.这个是DS18B20写读0/1的时序图

分析代码如下:
//单片机向DS18B20写一位 0 对应上图里面 左上方的图
void Write_Bit_0(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_9); //拉低
delay_us(90); //在60us --- 120us之间
GPIO_SetBits(GPIOB,GPIO_Pin_9); //拉高
delay_us(10); //拉高大于1us 这里选用10us
}
//单片机向DS18B20写一位 1
void Write_Bit_1(void)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_9); //拉低
delay_us(10); //拉低大于1us
GPIO_SetBits(GPIOB,GPIO_Pin_9); //拉高
delay_us(90); //我的理解是 拉高大于60us就是写1 所以选用90us
}
//单片机向DS18B20读一位
unsigned char Read_Bit(void)
{
DS_DIR_OUT(); //PB9为推挽输出模式
GPIO_ResetBits(GPIOB,GPIO_Pin_9); //拉低
delay_us(10); //大于1us 选用10us
DS_DIR_IN(); //PB9为浮空输入模式
delay_us(10); //等待一会 用于后面判断该管脚返回的是高电平还是低电平 太大不好试过80us返回的数据就奇怪了
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_9) == SET)
{
return 1; //高电平返回1
}
else
{
return 0; //低电平返回0
}
}通常我们对一个器件发送或者接受命令都是以1个字节的方式接受或发送。所以就用了一下代码:
//读一个字节
unsigned char ReadOneChar(void)
{
unsigned char i=0;
unsigned char dat=0;
for (i=0;i<8;i++)
{
dat = dat | (Read_Bit() << i); //DS18B20经手册查的是低位开始传输回来的,要获取一个完整的字节,这样子就可以。
}
return(dat);
}
//写一个字节
void WriteOneChar(unsigned char dat) //dat要发送的数据
{
unsigned char i=0;
DS_DIR_OUT(); //推挽输出
for(i=8;i>0;i--) //在15~60us之间对数据线进行采样,如果是高电平就写1,低写0发生。
{
if((dat & 0x01) == 1)
{
Write_Bit_1();
}
else
{
Write_Bit_0();
}
dat >>= 1;
}
}最后看到这张图了。按照这个顺序一步一步开始驱动并且获取温度数据。
//读温度值(低位放tempL;高位放tempH;)
void ReadTemperature(void)
{
Init_DS18B20(); //初始化
WriteOneChar(0xcc); //跳过读序列号的操作
WriteOneChar(0x44); //启动温度转换
delay_us(1000); //转换需要一点时间,延时
Init_DS18B20(); //初始化
WriteOneChar(0xcc); //跳过读序列号的操作
WriteOneChar(0xbe); //读温度寄存器(头两个值分别为温度的低位和高位)
tempL=ReadOneChar(); //读出温度的低位LSB
tempH=ReadOneChar(); //读出温度的高位MSB
if(tempH>0x7f) //最高位为1时温度是负
{
tempL=~tempL; //补码转换,取反加一
tempH=~tempH+1;
fg=0; //读取温度为负时fg=0
}
sdata = (tempH << 8) + tempL;
sdata = (sdata * 0.0625) * 100; //这里×100 用于保留两位小数了,因为我是unsigned int类型不是float。
printf("%d \r\n",sdata);
}补充说明:在main.c文件里定义如下:
unsigned char tempL=0; //设全局变量
unsigned char tempH=0;
unsigned int sdata; //温度的部分
unsigned char fg=1; //温度正负标志
int main()
{
ReadTemperature(); //这样使用就可以了。
}