Ubuntu20.04下ROS的安装与配置,话题通信、服务通信的编程实践验证
一、ROS的安装
1. 1设置软件源
设置软件源为国内的服务器,建议我这里使用的是阿里云服务器。
设置过程如下图所示:打开系统设置,拉倒最低端,点击关于菜单,点击软件更新,选择下载服务器,选择aliyun。
确认后,提示“重新载入”。点击“重新载入”按钮,等待更新完成。
1.2安装ROS noetic
1.2.1添加 sources.list
设置系统从 packages.ros.org 接收软件,命令如下:
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
按提示输入密码回车即可,注意,密码不会显示,不要按Backspace键,如果输入错误,回车重新输入即可。
1.2.2设置keys
命令如下:sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
设置成功后,输出显示:
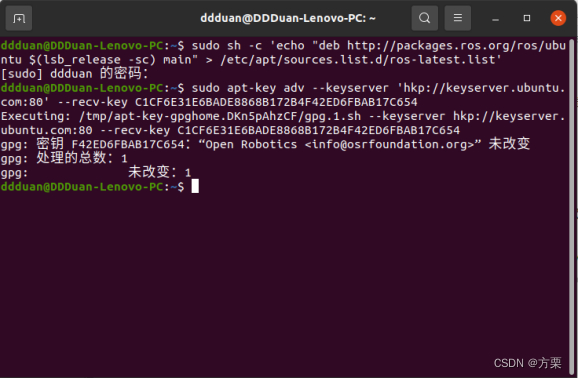
gpg: 合计被处理的数量:1
gpg: 已导入:1
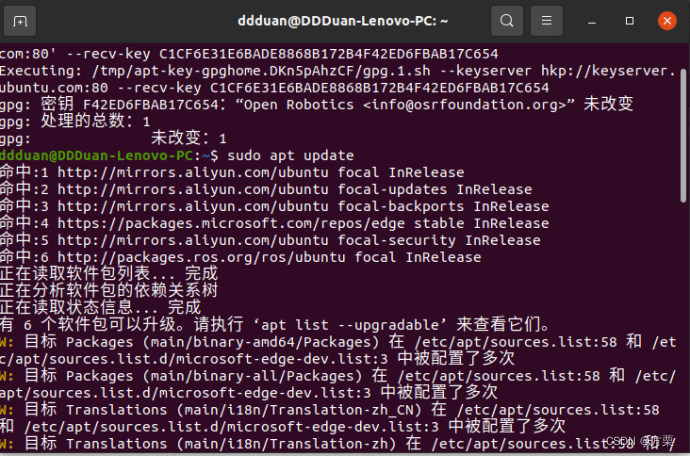
1.2.3更新系统软件源
输入命令:sudo apt update

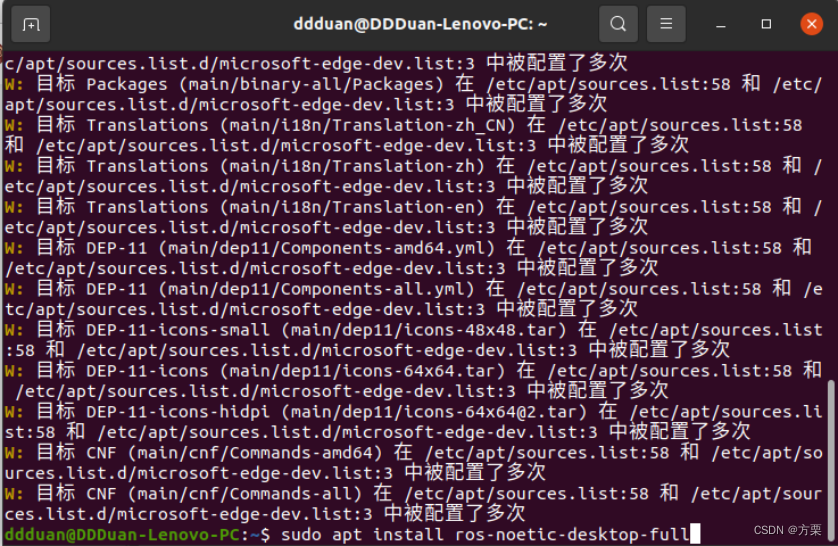
1.2.4安装noetic
输入命令安装noetic桌面完整版:
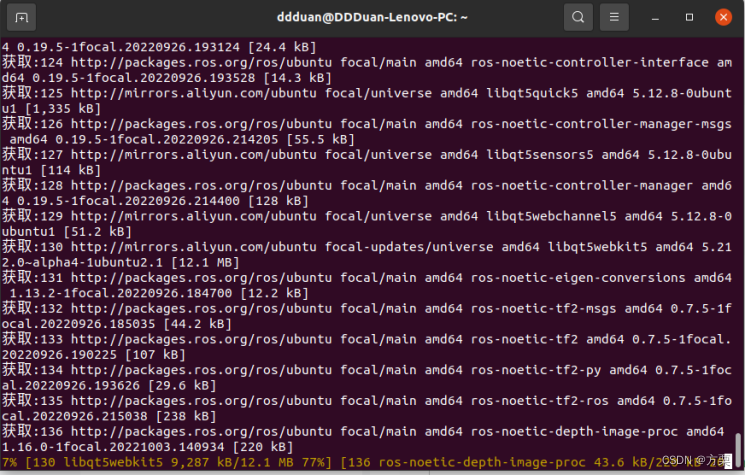
sudo apt install ros-noetic-desktop-full
软件包比较大,可能要等一段时间。

耐心等待即可
如果出现软件包无法下载,可返回第1步切换软件源,或者切换网络连接试试。
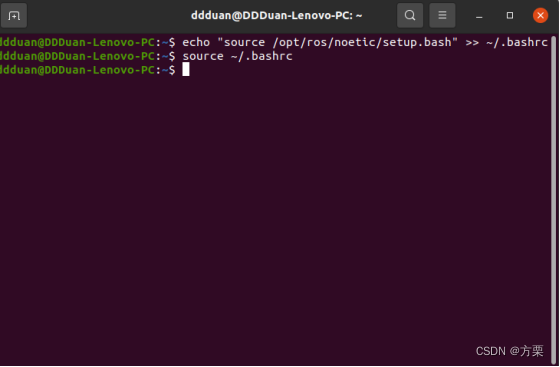
1.2.5设置环境变量
输入以下命令,设置环境变量。
echo “source /opt/ros/noetic/setup.bash” >> ~/.bashrc
source ~/.bashrc
二、 测试ROS与运行小海龟
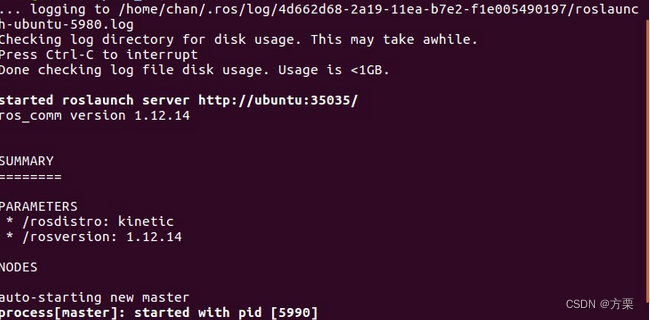
运行roscore
输入命令,运行ros,可显示ros的相关信息:
输入roscore

输出信息部分如下:
…logging to /home/ddduan/.ros/log/73c1f360-6103-11ed-8ddf-996439fcd44d/roslaunch-DDDuan-Lenovo-PC-5841.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://DDDuan-Lenovo-PC:44705/
ros_comm version 1.15.14
这是程序自检,检查日志目录的磁盘使用情况,然后进行总结,比如这里,给出了参数,进程等信息,表示无错。
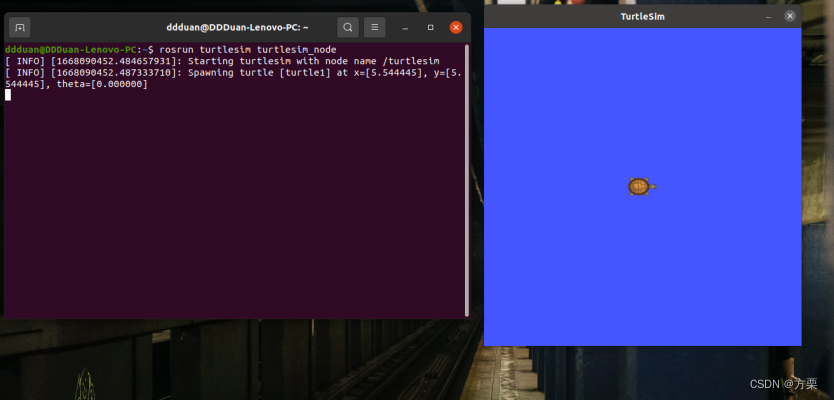
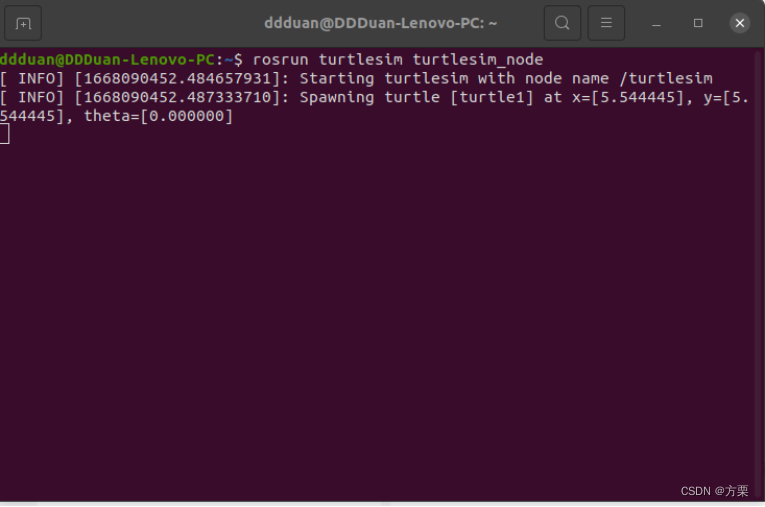
新打开一个终端窗口,输入命令,运行小海龟示例程序。
rosrun turtlesim turtlesim_node
可以看到小海龟窗口显示出来。
再打开一个终端窗口,输入命令,控制小海龟移动。
rosrun turtlesim turtle_teleop_key
保持这个终端窗口激活,按下键盘的方向键,就可以移动小海龟了。
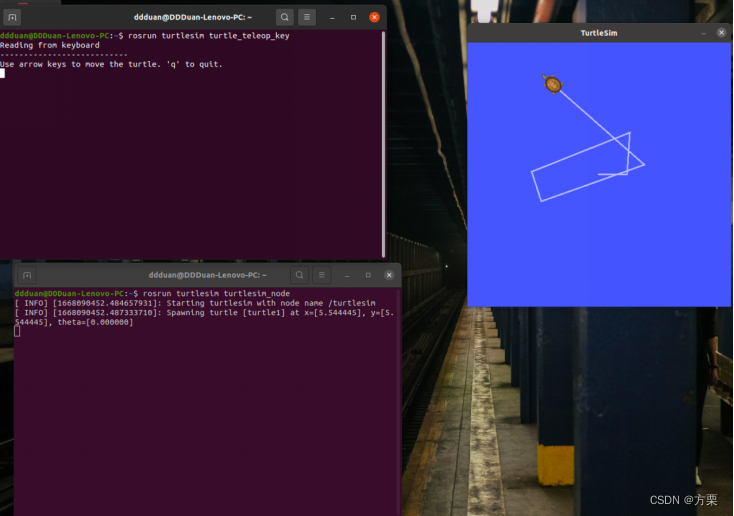
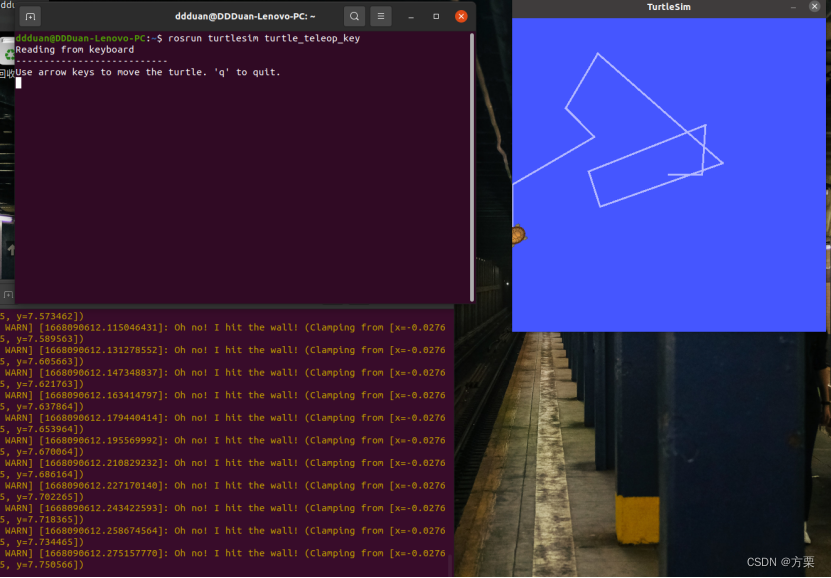
运行小海龟,保持键盘的焦点在rosrun turtlesim turtle_teleop_key的终端页面内,通 过↑、↓、←、→来控制小乌龟的移动,而且可以看到,在小海龟“撞墙”的时候,我们的rosrun turtlesim turtlesim_node终端页面会有提示数据的输出。
三、ros系统常见用法介绍
启动ros内核
roscore
查看topic列表
rostopic list
显示某个topic
rostopic echo /camera_raw
显示某个topic的header
rostopic echo /camera_raw/header
将compressed格式转为raw格式
rosrun image_transport republish compressed in:=/Mate/camera/ raw out:=/Mate/camera_raw/
限制topic频率
rosrun topic_tools throttle messages /Mate/camera_raw 4.0 /left
录制rosbag包
rosbag record -O bagpath.bag /camera_raw /imu
播放与加速播放rosbag
rosbag play -r 100 bagpath.bag
rosbag play bagpath.bag
启动rviz
rviz
四、ROS通信
ROS的核心——分布式通信机制
ROS是一个分布式框架,为用户提供多节点(进程)之间的通信服务,所有软件功能和工具都建立在这种分布式通信机制上,所以ROS的通信机制是最底层也是最核心的技术。在大多数应用场景下,尽管我们不需要关注底层通信的实现机制,但是了解其相关原理一定会帮助我们在开发过程中更好地使用ROS。ROS最核心的三种通信机制如下。
- Topic机制
- service机制
- 共享参数机制
4.1话题通信
话题通信,一般就是指:一个节点发布消息,另一个节点订阅该消息。适用于不断更新的、少逻辑处理的数据传输场景。
1.话题通信的三个角色
话题通信涉及到三个角色。
Talker(发布者)
负责像订阅者发布数据。
Listener(订阅者)
负责接收发布者的数据。
ROS Master(管理者)
负责保管发布者和订阅者注册的信息,并匹配话题相同的发布者与订阅者,帮助发布者与订阅者建立连接。
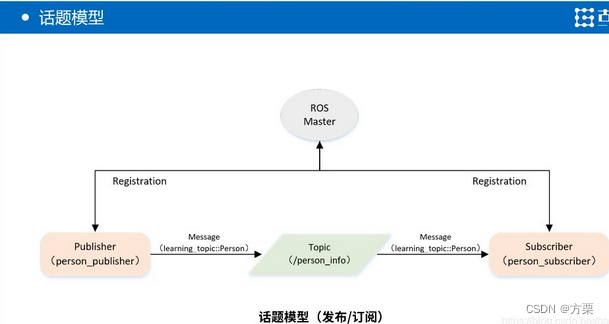
2.话题通信建立的流程
下图就是话题通信建立的示意图,摘抄自课程笔记。
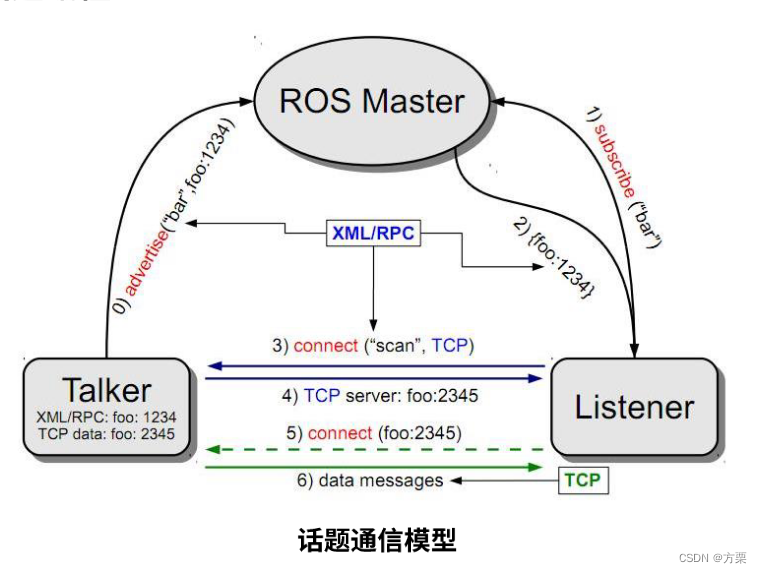
step0:
发布者在管理者处注册,其中包含所发布消息的话题名称。管理者会将节点的注册信息加入到注册表中。
step1:
订阅者在管理者处注册,包含需要订阅消息的话题名称。管理者会将节点的注册信息加入到注册表中。
step2:
管理者根据注册表中的发布者、订阅者的话题名称进行匹配,并将发布者的地址信息告诉订阅者。
step3:
订阅者向发布者发送连接请求,传输订阅的话题名称、消息类型以及通信协议(TCP/UDP)。
step4:
发布者响应订阅者的请求,并发送自身的 TCP 地址信息。
step5:
订阅者根据步骤4 返回的消息使用 TCP 与发布者建立网络连接。
step6:
连接建立以后,发布者向订阅者发送信息。
3.注意事项及说明
1.step0与step1没有先后顺序的要求,即发布者和订阅者的启动没有先后的要求
2.只有当发布者和订阅者的话题名称相同时才能进行话题通信
3.发布者和订阅者可以有多个
4.发布者和订阅者关闭以后就不再需要管理者,即使管理者关闭,话题通信仍能进行。
5.在代码编写中,我们关注的一般是话题、消息传输的格式等等,而发布者和订阅者所建立连接的过程是被封装好的。
4.2服务通信
服务通信是基于请求响应模式的,是一种应答机制。也即: 一个节点A向另一个节点B发送请求,B接收处理请求并产生响应结果返回给A。一般用于偶然的、对时时性有要求、有一定逻辑处理需求的数据传输场景。
1.服务通信的三个角色
和话题通信相似,服务通信也有三个角色
-
client(客户端)
负责向服务端发送请求,并接收服务端发送的数据。 -
server(服务端)
负责接收处理请求,并对客户端做出响应。 -
ROS Master(管理者)
负责保管客户端和服务端注册的信息,并匹配话题相同的客户端与服务端,帮助客户端与服务端建立连接。
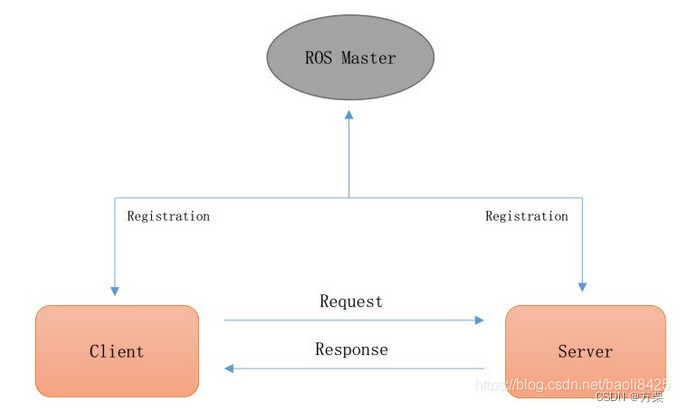
2.服务通信建立的流程
下图就是服务通信建立的示意图,摘抄自课程笔记。
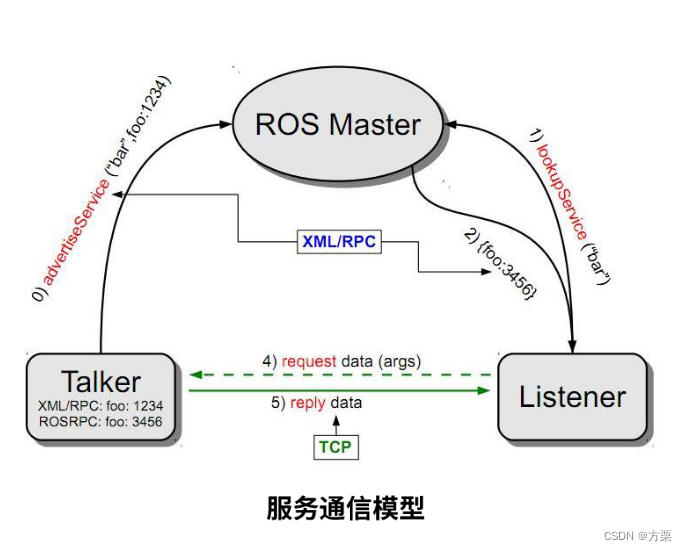
step0:
服务端启动,在管理者处注册,其中包含提供的服务的名称。管理者会将节点的注册信息加入到注册表中。
step1:
客户端启动,在管理者处注册,其中包含请求的服务的名称。管理者会将节点的注册信息加入到注册表中。
step2:
管理者根据服务端和客户端的服务名称进行匹配,并将服务端的地址信息告知客户端。
step3:
客户端与服务端进行网络连接,并发送有关请求。
step4:
服务端处理请求数据,产生响应并发送给客户端。
3.注意事项
1.客户端请求被处理时,要保证服务端已经启动
2.服务端和客户端都可以存在多个
五、服务通信的编程实现
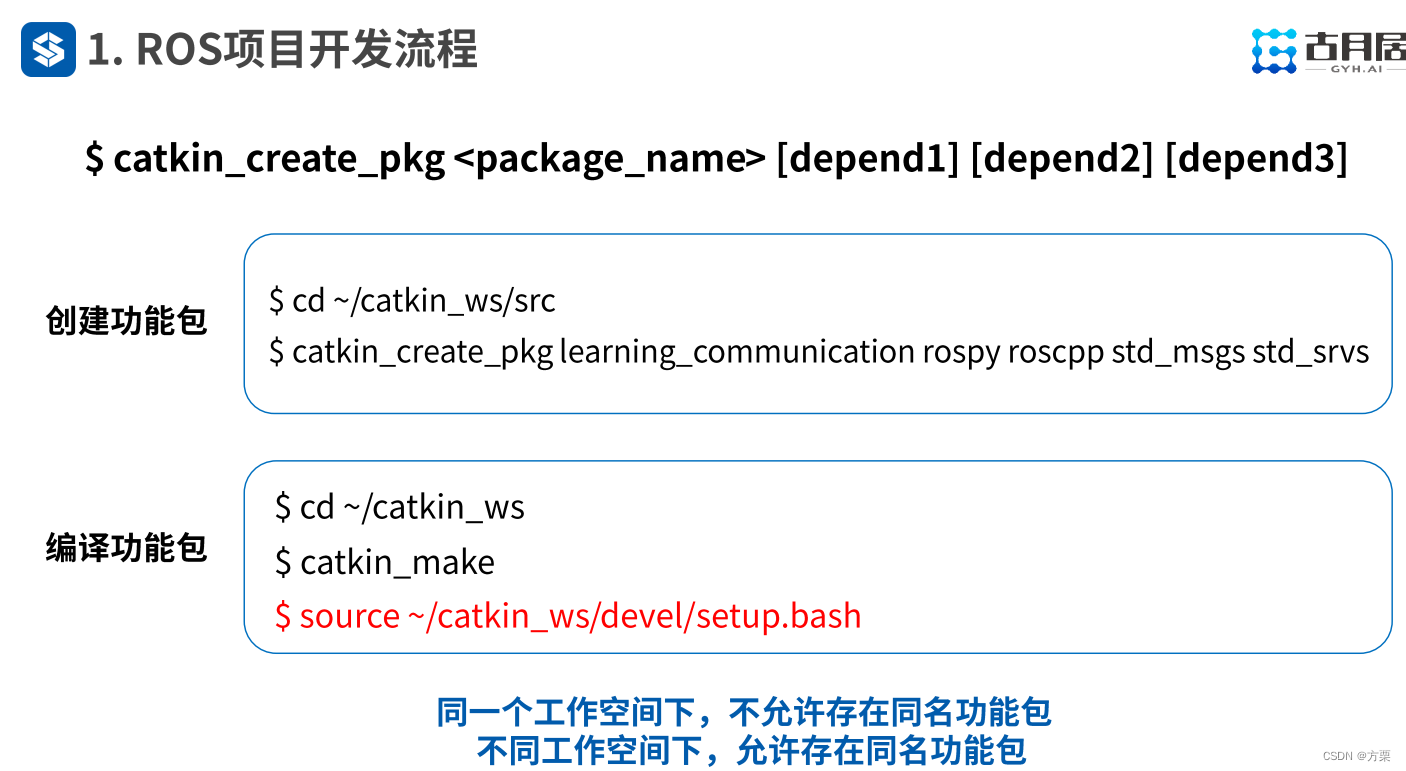
1. 创建功能包
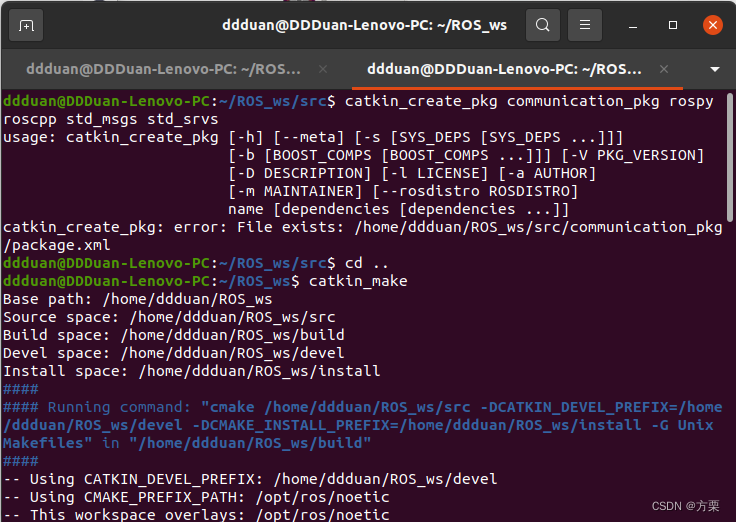
在ROS工作空间ROS_ws的src文件夹目录下创建一个功能包,命名为communication_pkg,并编译完成。
catkin_create_pkg communication_pkg rospy roscpp std_msgs std_srvs
catkin_mae
sourceROS_ws/devel/setup.bash
2. 节点编程与服务数据定义
2.1 案例说明
定义一个客户端Client,通过自定义的服务请求Request将两个整数发送给服务器Server,同时服务器Server将两个整数相加后,再通过自定义的服务应答Response将两个整数的和反馈到客户端Client。
2.2 服务数据的定义
在功能包目录下创建一个新的文件夹,命名为srv,并在此文件夹中创建一个空文件AddTwoInts.srv。

在AddTwoInts.srv文件中输入以下代码,定义服务消息内容。
int64 a
int64 b
---
int64 sum
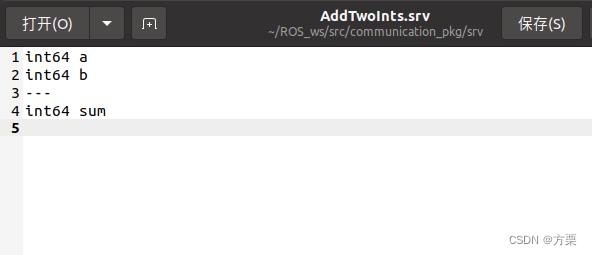
说明:
- 使用三个小横杠“—”作为分隔符,“—”上面代表服务请求的消息内容,“—”下面代表服务应答的消息内容。附相关资料:https://wiki.ros.org/srv
2.3 创建.cpp文件
在功能包下面的src文件夹目录下创建一个空文件client.cpp。
2.4 客户端编程
打开上面所创建的文件client.cpp,输入以下代码。
#include <cstdlib>
#include "ros/ros.h"
#include "communication_pkg/AddTwoInts.h"
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "add_two_ints_client");
//从终端获取数据
if(argc != 3)
{
ROS_INFO("usage: add_two_ints_client X Y");
return 1;
}
//创建句柄
ros::NodeHandle n;
//创建一个客户端,定义服务请求数据类型communication_pkg::AddTwoInts
ros::ServiceClient client = n.serviceClient<communication_pkg::AddTwoInts>("add_two_ints");
//定义服务消息内容
communication_pkg::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
//发布服务请求,等待应答结果
if(client.call(srv))
{
ROS_INFO("Sum: %ld", (long int)srv.response.sum);
}
else
{
ROS_ERROR("Failed to call service add_two_ints");
return 1;
}
return 0;
}
说明:
- 头文件cstdlib.h是C++里面的一个常用函数库,等价于C中的stdlib.h,可以提供一些函数与符号常量。
- 头文件ros/ros.h包含了标准ROS类的声明,在每一个ROS程序中都需要包含它。
- 头文件communication_pkg/AddTwoInts.h是由AddTwoInts.srv编译扩展得到,包含了针对C++类的定义等,它存放在工作空间的devel/include路径下的communication_pkg文件夹中。
- int main(int argc, char **argv)是main函数的一种定义形式,其参数argc和argv用于运行时,把命令行参数传入主程序,其中arg是指arguments,即参数。
- int argc:英文名为arguments count(参数计数),表示运行程序传送给main函数的命令行参数总个数,包括可执行程序名,其中当argc=1时表示只有一个程序名称,此时存储在argv[0]中。
- char **argv:英文名为arguments value/vector(参数值),用来存放指向字符串参数的指针数组,每个元素指向一个参数,空格分隔参数,其长度为argc。数组下标从0开始,argv[argc]=NULL。argv[0]指向程序运行时的全路名;argv[1]指向程序在DOS命令中执行程序名后的第一个字符串;argv[2]指向执行程序名后的第二个字符串。
- ros::init(argc, argv, “add_two_ints_client”)的作用是初始化ROS节点,第三个参数表示节点名称,这个节点名是唯一的。
- if(argc != 3){…}表示当终端命令行输入的参数数量不等于3,则执行这段代码。
- ros::NodeHandle n;的作用是创建句柄,启动ROS节点。
- ros::ServiceClient client = n.serviceClient<communication_pkg::AddTwoInts>(“add_two_ints”);这是用户调用ROS服务的其中一种方法。它创建了一个客户端,其返回的ros::ServiceClient类的对象client之后将用于向ROS网络中名为add_two_ints的节点发送服务请求,服务请求的数据类型为communication_pkg::AddTwoInts。
communication_pkg::AddTwoInts srv;
srv.request.a = atoll(argv[1]);
srv.request.b = atoll(argv[2]);
- 这是创建服务请求和服务应答的其中一种方法。它定义了一个service_example::AddTwoInts类型的对象,该对象中的成员正是srv文件中定义的a、b、sum,将终端命令行输入的两个数填充到数据成员a、b中。atoll()函数的作用是将字符串转换成长长整型数(long long int),即srv.request.a = atoll(argv[1])是将命令行输入的字符串中的第一个数转换成长长整型数,并赋值给成员a,srv.request.b = atoll(argv[2])则同理。
- if(client.call(srv)){…}表示向ROS网络发起服务请求。由于服务请求处于阻塞状态,需要等待请求发起完成后才能返回值。如果服务调用成功,则call()将返回true,并且srv.response中的值将有效。如果调用失败,则call()将返回false,并且srv.response中的值将无效。
- ROS_INFO()和ROS_ERROR()用于输出日志信息,日志消息分为五个不同的严重级别,按照严重性程度递增,分别为DEBUG、INFO、WARN、ERROR、FATAL。
综上所述,实现一个客户端的步骤大致可分为以下几点:
- 初始化ROS节点;
- 创建client实例;
- 发布服务请求数据;
- 等待Server处理之后的应答结果。
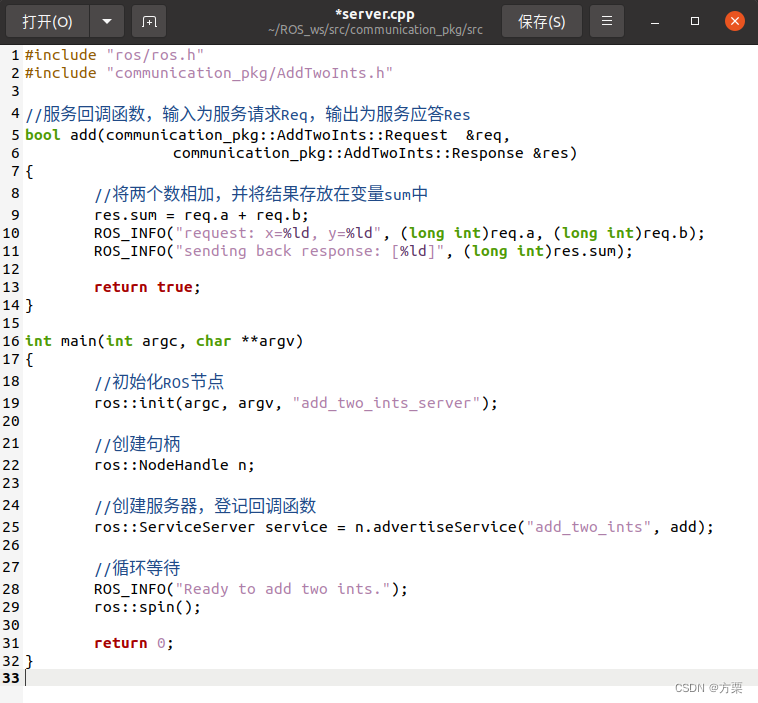
2.5 服务器编程
在src文件夹下再创建一个空文件server.cpp,输入以下代码。
#include "ros/ros.h"
#include "communication_pkg/AddTwoInts.h"
//服务回调函数,输入为服务请求Req,输出为服务应答Res
bool add(communication_pkg::AddTwoInts::Request &req,
communication_pkg::AddTwoInts::Response &res)
{
//将两个数相加,并将结果存放在变量sum中
res.sum = req.a + req.b;
ROS_INFO("request: x=%ld, y=%ld", (long int)req.a, (long int)req.b);
ROS_INFO("sending back response: [%ld]", (long int)res.sum);
return true;
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "add_two_ints_server");
//创建句柄
ros::NodeHandle n;
//创建服务器,登记回调函数
ros::ServiceServer service = n.advertiseService("add_two_ints", add);
//循环等待
ROS_INFO("Ready to add two ints.");
ros::spin();
return 0;
}
说明:
- main函数中一开始都是类似的,初始化ROS节点,创建句柄,从而启动ROS节点。
- ros::ServiceServer service = n.advertiseService(“add_two_ints”, add);的作用是创建服务,并将服务加入到ROS网络中。这个服务在ROS网络中以add_two_ints命名,并且作为唯一标识,以便于其他节点通过服务名称进行请求。当接收到服务请求后,则调用add()回调函数。
- ros::spin()的作用是让程序进入自循环的挂起状态,从而让程序以最好的效率接收客户端的请求并调用回调函数。
- 服务回调函数的表示形式如下:
bool callback(MReq &request, MRes &response)
- 其中MReq和MRes与提供给advertiseService()的请求/应答的数据类型相匹配。回调函数的返回值若为true,则表示服务请求成功,并且服务应答已填充必要的数据。若返回值为false则表示服务请求失败,并且服务应答将不会发送给客户端。
- 回调函数add(communication_pkg::AddTwoInts::Request &req, communication_pkg::AddTwoInts::Response &res)的作用是实现两个int型整数求和的服务,两个整数从request获取,求和结果填充到response里,request与response的具体数据类型在srv文件中被定义。
综上所述,实现一个服务器的步骤大致可分为以下几点:
- 初始化ROS节点;
- 创建Server实例;
- 循环等待服务请求,进入回调函数;
- 在回调函数中完成服务功能的处理,并反馈应答数据。
3. 配置与编译
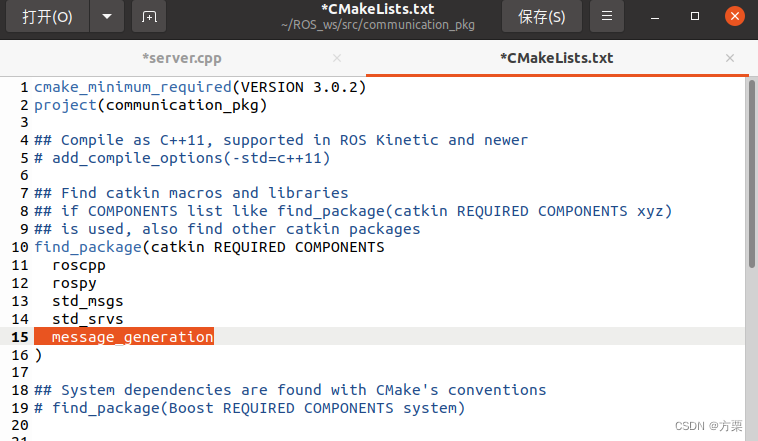
3.1 在CMaKeLists.txt中添加编译选项
打开功能包中的CMaKeLists.txt文件,在如下位置的find_package中添加功能包,以便于(节点)调用它们生成消息。
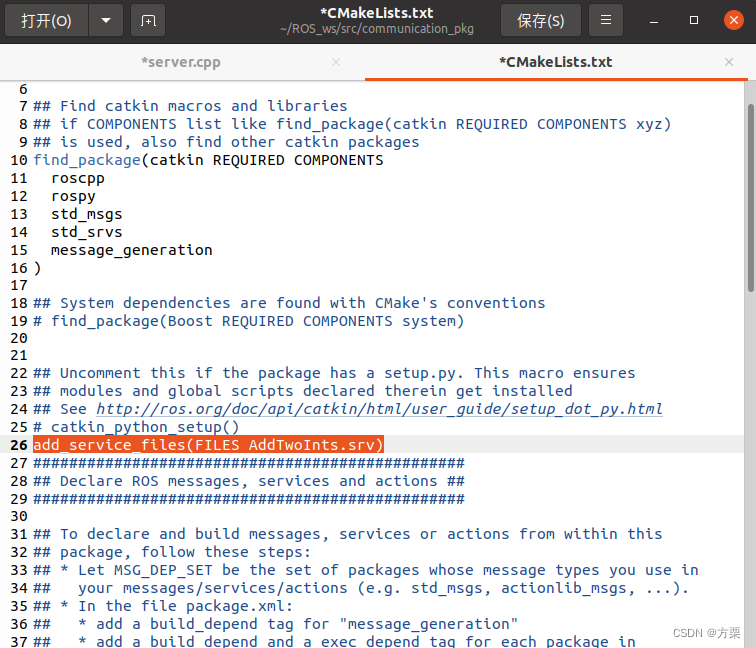
在如下位置添加相关的.srv文件,确保了CMake在重新配置时知道这些新添加的.srv文件,同时添加.srv文件在生成消息时的所有依赖项(功能包)。
add_service_files(FILES AddTwoInts.srv)
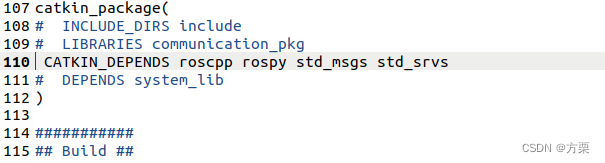
将如下位置中CATLIN_DEPENDS前面的“#”去掉。
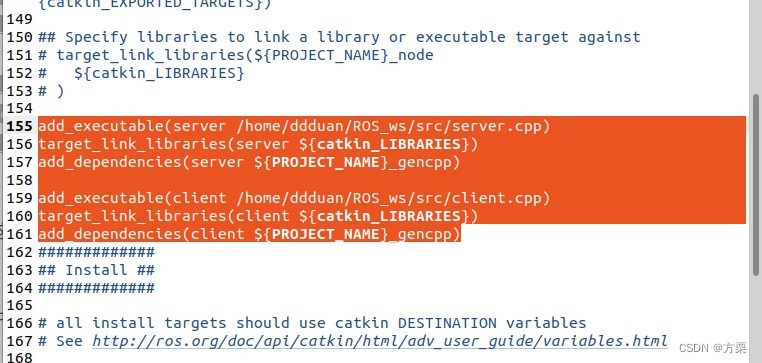
在如下位置进行配置,add_executable(client src/client.cpp)的作用是将src文件夹下的client.cpp文件编译成名为client的可执行文件。target_link_libraries(client ${catkin_LIBRARIES})的作用是将client可执行文件与ROS相关的库链接。add_dependencies(client ${PROJECT_NAME}_gencpp)的作用是将client可执行文件与一些动态生成的文件链接。
add_executable(server /home/ddduan/ROS_ws/src/server.cpp)
target_link_libraries(server ${catkin_LIBRARIES})
add_dependencies(server ${PROJECT_NAME}_gencpp)
add_executable(client /home/ddduan/ROS_ws/src/client.cpp)
target_link_libraries(client ${catkin_LIBRARIES})
add_dependencies(client ${PROJECT_NAME}_gencpp)
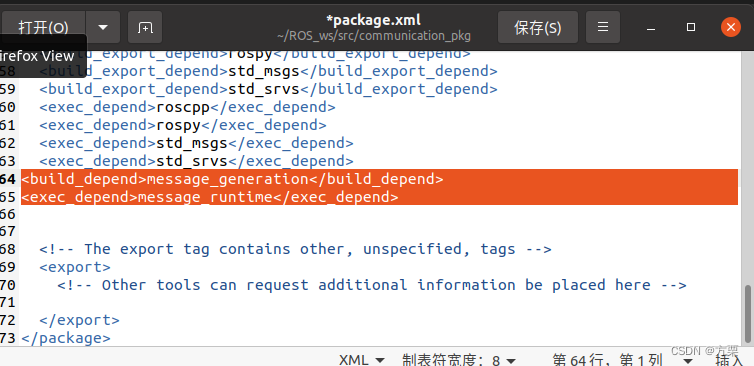
3.2 在package.xml中添加功能包依赖
打开功能包中的package.xml文件,在如下位置添加功能包依赖。
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
说明:
<buildtool_depend>catkin</buildtool_depend>
这条语句表示需要依赖catkin工具包用于使用catkin_make指令进行编译。
<build_export_depend>roscpp</build_export_depend>
这条语句表示编译后导出相关文件需要依赖roscpp功能包。
<build_depend>message_generation</build_depend>
这条语句表示在编译时会依赖一个动态产生message的功能包。
<exec_depend>message_runtime</exec_depend>
这条语句表示在运行时会依赖message_runtime的功能包。
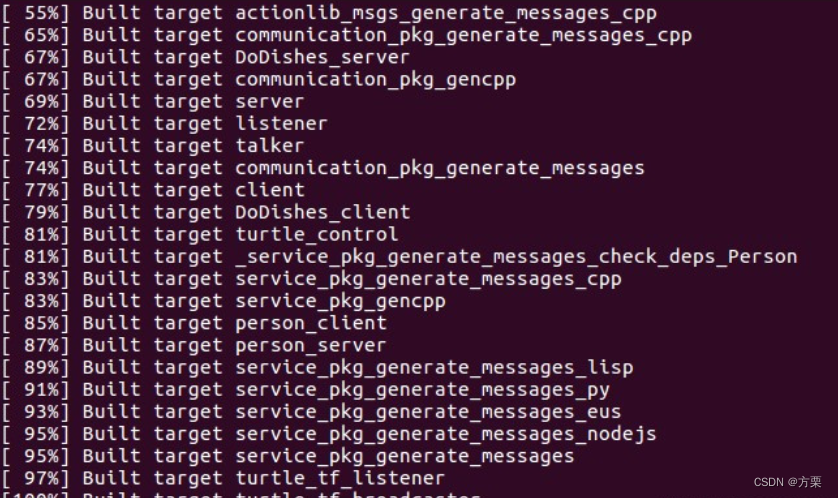
3.3 编译文件
在/ROS_ws文件夹路径下打开一个新的终端,输入以下代码进行编译。
$ catkin_make
编译完成后,输入以下代码运行主节点。
$ roscore
打开一个新的终端,配置环境变量后,输入以下代码运行节点。
$ rosrun communication_pkg client 整数1 整数2
打开一个新的终端,配置环境变量后,输入以下代码运行节点。
$ rosrun communication_pkg server
六、话题通信的编程实现
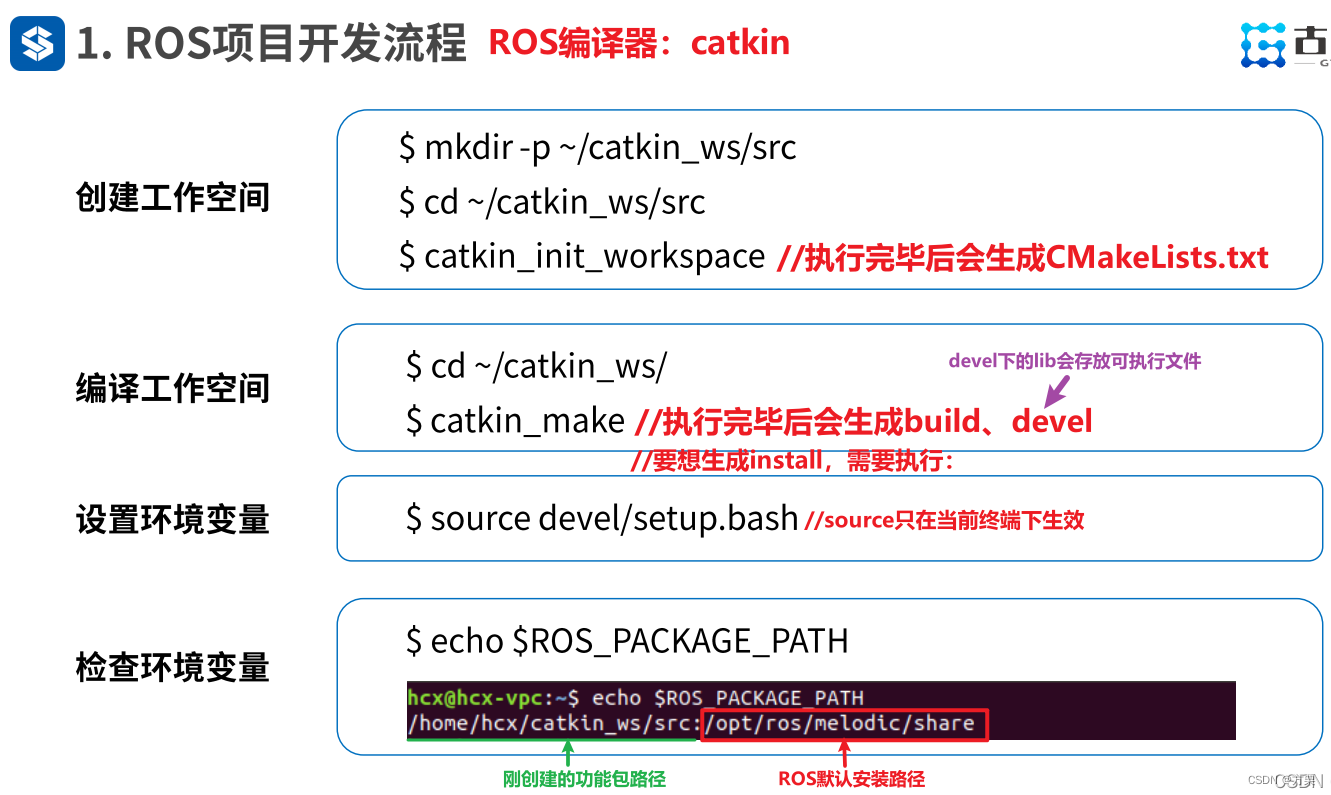
1. 创建功能包
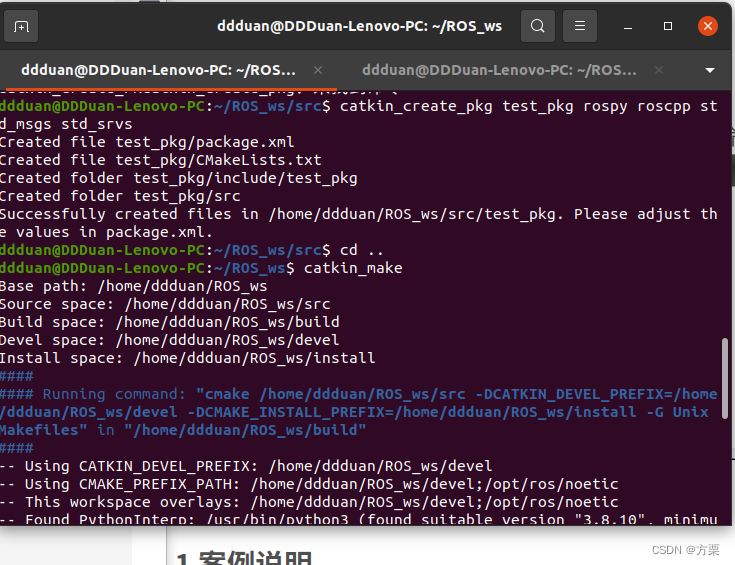
在ROS工作空间ROS_ws的src文件夹目录下创建一个功能包,命名为test_pkg,并编译完成。
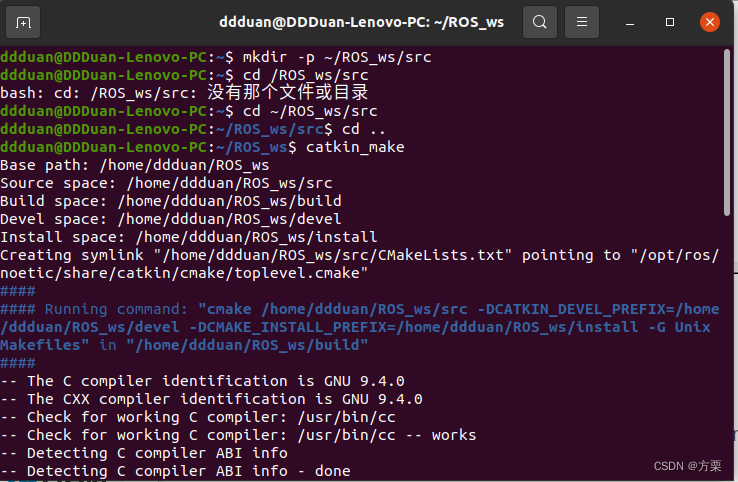
这里参照例程进行修改
ddduan@DDDuan-Lenovo-PC:~$ mkdir -p ~/ROS_ws/src
ddduan@DDDuan-Lenovo-PC:~$ cd ~/ROS_ws/src
ddduan@DDDuan-Lenovo-PC:~/ROS_ws/src$ cd ..
ddduan@DDDuan-Lenovo-PC:~/ROS_ws$ catkin_make
 ```
```
source devel/setup.bash
echo $ROS_PACKAGE_PATH
`

catkin_create_pkg test_pkg rospy roscpp std_msgs std_srvs
catkin_make
source ~/ROS_ws/devel/setup.bash

2. 节点编程与消息定义
2.1 案例说明
定义一个发布者Publisher,通过自定义的消息Person将消息数据name、sex及age等发送到订阅者Subscriber,同时订阅者将消息内容打印到终端界面。
2.2 话题消息的定义
在功能包目录下创建一个新的文件夹,命名为msg,并在此文件夹中创建一个空文件Person.msg。可以使用鼠标右键New Document>Empty Document,或在src路径下通过终端命令符touch创建空文件。
在Person.msg文件中输入以下代码,定义话题消息。
string name
uint8 sex
uint8 age
uint8 unknown = 0
uint8 male = 1
uint8 female = 2

2.3 创建.cpp文件
在功能包下面的src文件夹目录下创建一个空文件Publisher_test.cpp。
2.4 话题发布者编程
打开上述创建的文件Publisher_test,输入以下代码。
#include "ros/ros.h"
#include "test_pkg/Person.h"
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "Publisher_test");
//创建句柄
ros::NodeHandle n;
//创建一个发布者Publisher,发布名为/person_info的topic,消息类型为test_pkg::Person,队列长度为10
ros::Publisher person_info_pub = n.advertise<test_pkg::Person>("/person_info", 10);
//设置消息发布频率
ros::Rate loop_rate(1);
int count = 0;
while(ros::ok())
{
//初始化消息内容
test_pkg::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = test_pkg::Person::male;
//发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
//按照设置的频率延时
loop_rate.sleep();
}
}

说明:
- 头文件ros/ros.h包含了标准ROS类的声明,在每一个ROS程序中都需要包含它。
- 头文件test_pkg/Person.h是由Person.msg编译扩展得到,包含了针对C++类的定义等,它存放在工作空间的devel文件夹中。
- main函数中ros::init(argc, argv, “Publisher_test”)的作用是初始化ROS节点,第三个参数表示节点名称,这个节点名是唯一的。
- ros::NodeHandle n;的作用是创建句柄,启动ROS节点。
- ros::Publisher person_info_pub = n.advertise<test_pkg::Person>(“/person_info”, 10);使用ros::Publisher类定义了一个发布者对象person_info_pub,发布的消息的数据类型为test_pkg::Person,用<>表示。/person_info表示发布消息数据的话题名,必须要与订阅者订阅的话题名相同。advertise()的第二个参数表示用于发布消息的消息队列长度,如果发布消息的速度快于底层响应的速度,则此处的数字指定在丢弃一些消息之前要缓冲多少条最新的消息。调用advertise()函数后,主节点(ROS Master)将通知任何试图订阅此话题名的节点,然后他们将与此节点协商对接。同时advertise()将返回一个Publisher对象,该对象使您可以通过调用publish()来发布有关该主题的消息。
- ros::Rate loop_rate(1);的作用是设置消息发布频率为1Hz。
- int count = 0;表明我们已发送多少条消息,用于为每个消息创建一个唯一的字符串。
- 若ros::ok()返回false,则可能发生了以下事件:
(1) SIGINT被触发(Ctrl-C);
(2) 被另一同名节点踢出 ROS 网络;
(3) ros::shutdown()被程序的另一部分调用;
(4) 节点中的所有ros::NodeHandles 都已经被销毁。
test_pkg::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = test_pkg::Person::male;
- 这部分的作用是对消息内容初始化,首先创建一个test_pkg::Person类的对象,之后设置这个对象中的name、age和sex。
- person_info_pub.publish(person_msg);的作用是发布消息person_msg。
- ROS_INFO()类似于C语言中的printf()函数,将内容打印在终端界面显示。
- loop_rate.sleep();的作用是延时,以保证消息能够按照之前设置的发布频率发布出去。
综上所述,实现一个话题发布者的步骤大致可分为以下几点:
初始化ROS节点;
向ROS Master注册节点信息,包括发布的话题名和话题中的消息类型;
按照一定频率循环发送消息。
2.5 话题订阅者编程
在src文件夹下再创建一个空文件Subscriber_test.cpp,输入以下代码。
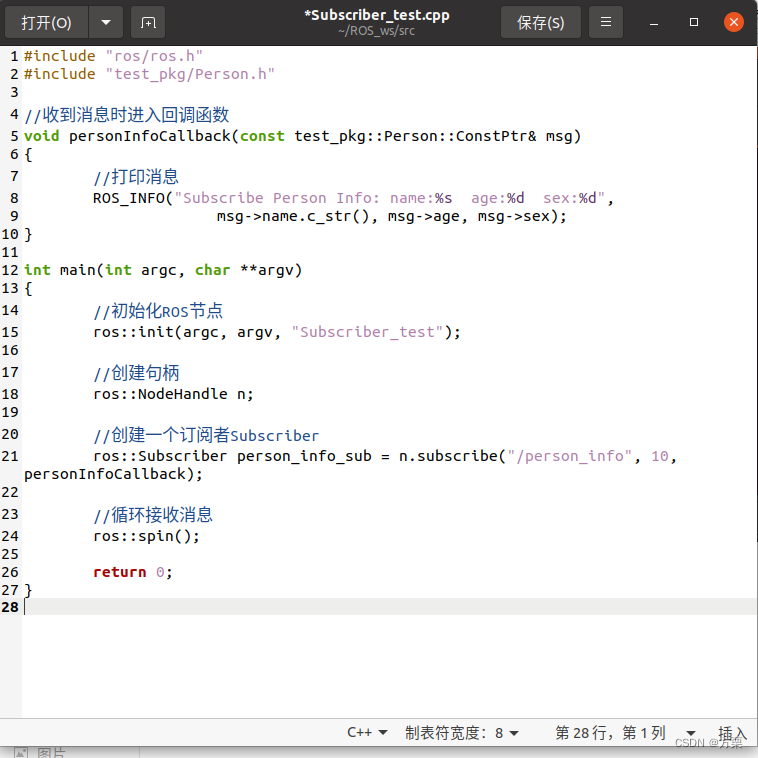
#include "ros/ros.h"
#include "test_pkg/Person.h"
//收到消息时进入回调函数
void personInfoCallback(const test_pkg::Person::ConstPtr& msg)
{
//打印消息
ROS_INFO("Subscribe Person Info: name:%s age:%d sex:%d",
msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
//初始化ROS节点
ros::init(argc, argv, "Subscriber_test");
//创建句柄
ros::NodeHandle n;
//创建一个订阅者Subscriber
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
//循环接收消息
ros::spin();
return 0;
}
说明:
- personInfoCallback(const test_pkg::Person::ConstPtr& msg)是一个回调函数,一旦订阅者接收到消息,则执行该回调函数。在该回调函数中,打印消息内容name、age和sex。
- main函数中一开始跟发布者一样,初始化ROS节点,创建句柄。
- ros::Subscriber person_info_sub = n.subscribe(“/person_info”, 10, personInfoCallback);使用ros::Subscriber类定义一个订阅者对象person_info_sub。subscribe()函数中的第一个参数表示需要订阅的话题名,第二个参数表示消息队列的长度,如果消息到达的速度快于处理速度,则开始丢弃最旧的消息之前将被缓冲的消息数。subscribe()函数的第三个参数是回调函数名,消息被传递到回调函数。
- ros::spin()在调用后不会再返回,也就是主程序到这儿就不往下执行了,一般放在main函数最后,而不放在while()循环里。
综上所述,实现一个话题订阅者的步骤大致可分为以下几点:
初始化ROS节点;
订阅需要的话题;
循环等待话题消息,接收到消息后进入回调函数;
在回调函数中完成消息处理。
3. 配置与编译
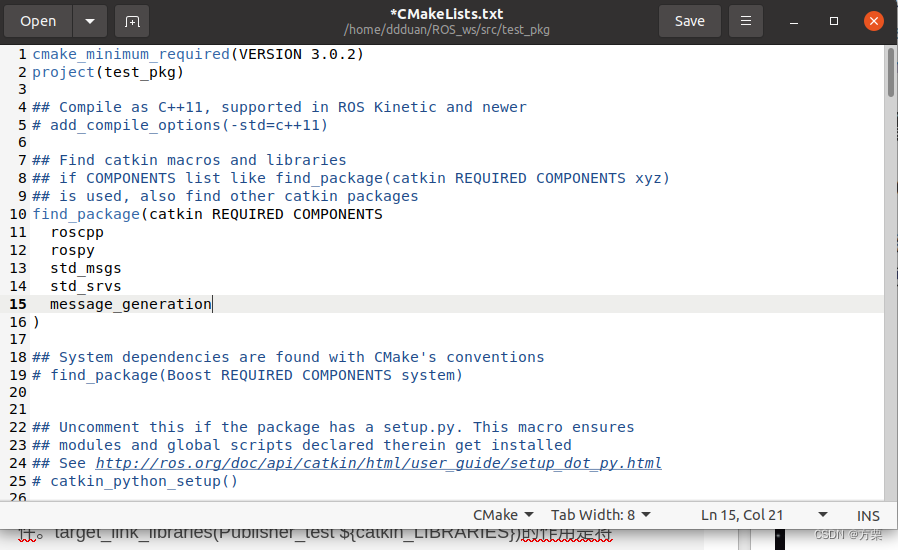
3.1 在CMaKeLists.txt中添加编译选项
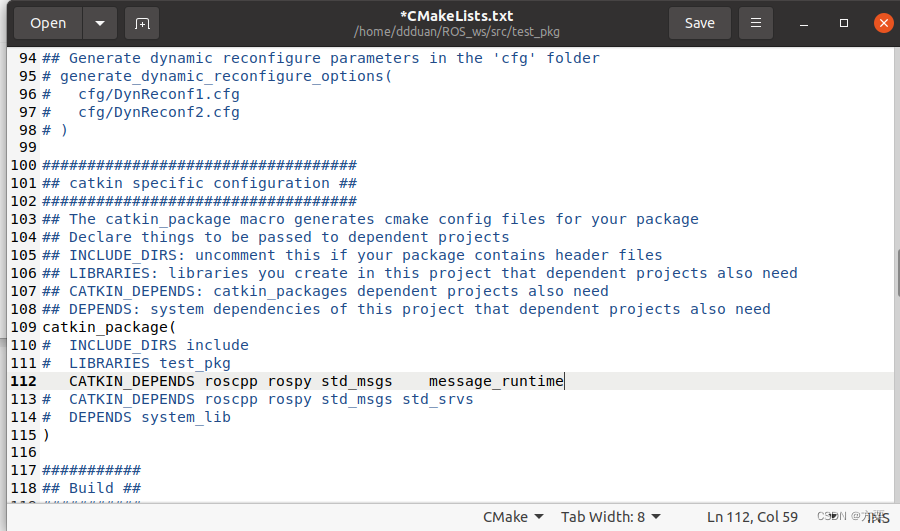
打开功能包中的CMaKeLists.txt文件。在如下位置的find_package中添加message_generation功能包,以便于(节点)调用它们生成消息。
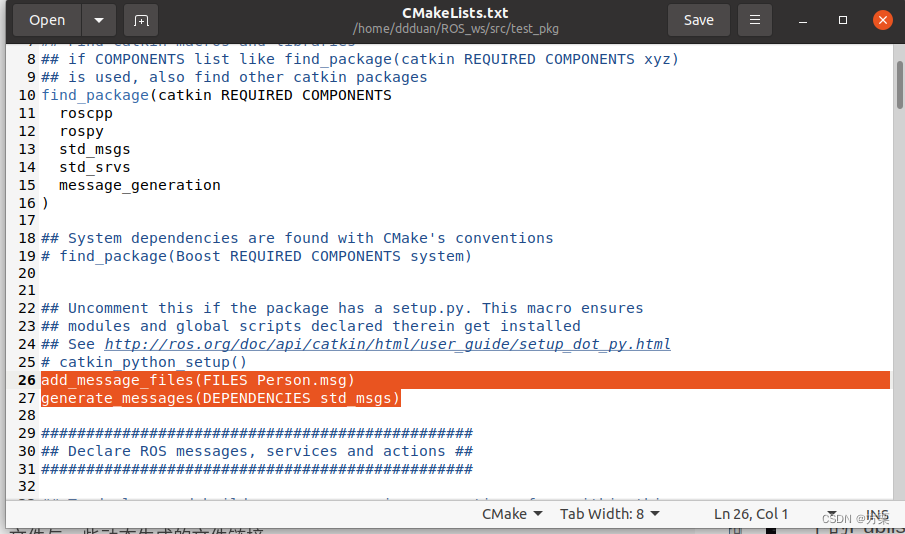
在如下位置添加相关的.msg文件,确保了CMake在重新配置时知道这些新添加的.msg文件,同时添加 .msg文件在生成消息时的所有依赖项(功能包)。
add_message_files(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)
将如下位置中CATLIN_DEPENDS前面的“#”去掉。
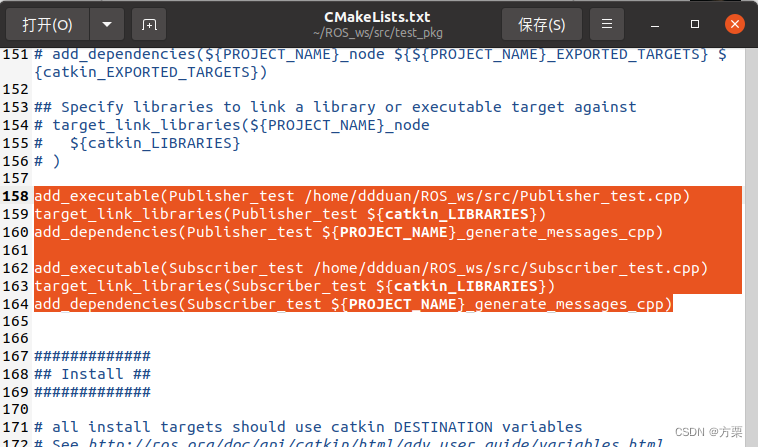
在如下位置进行配置,add_executable(Publisher_test src/Publisher_test.cpp)的作用是将src文件夹下的Publisher_test.cpp文件编译成名为Publisher_test的可执行文件。target_link_libraries(Publisher_test ${catkin_LIBRARIES})的作用是将Publisher_test可执行文件与ROS相关的库链接。add_dependencies(Publisher_test ${PROJECT_NAME}_generate_messages_cpp)的作用是将Publisher_test可执行文件与一些动态生成的文件链接。
add_executable(Publisher_test /home/ddduan/ROS_ws/src/Publisher_test.cpp)
target_link_libraries(Publisher_test ${catkin_LIBRARIES})
add_dependencies(Publisher_test ${PROJECT_NAME}_generate_messages_cpp)
add_executable(Subscriber_test /home/ddduan/ROS_ws/src/Subscriber_test.cpp)
target_link_libraries(Subscriber_test ${catkin_LIBRARIES})
add_dependencies(Subscriber_test ${PROJECT_NAME}_generate_messages_cpp)
3.2 在package.xml中添加功能包依赖
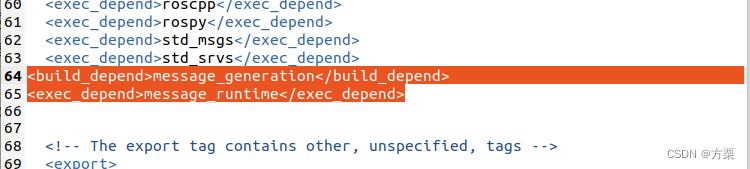
打开功能包中的package.xml文件,在如下位置添加功能包依赖。
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
说明:
<build_depend>message_generation</build_depend>
这条语句表示在编译时会依赖一个动态产生message的功能包。
<exec_depend>message_runtime</exec_depend>
这条语句表示在运行时会依赖message_runtime的功能包。
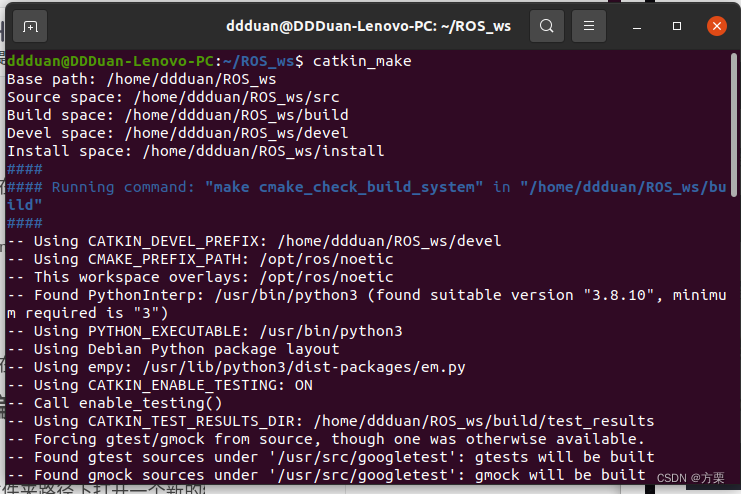
3.3 编译文件
在/ROS_ws文件夹路径下打开一个新的终端,输入以下代码进行编译。
catkin_make
编译完成后,输入以下代码运行主节点。
roscore

4.实现
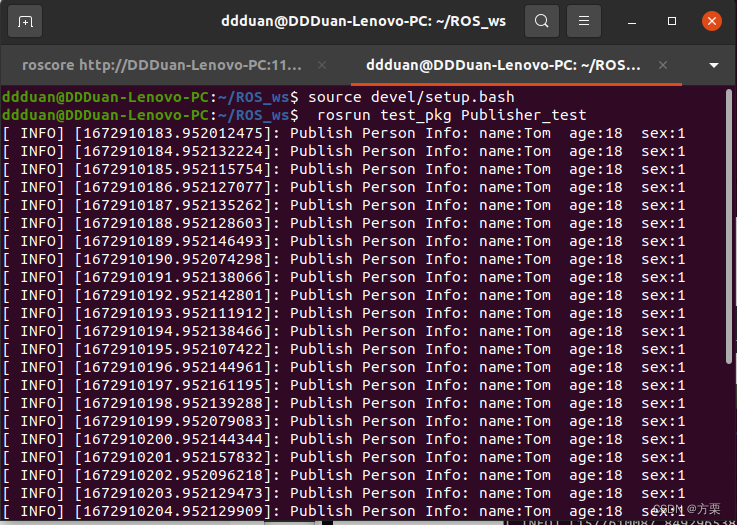
打开一个新的终端,首先配置环境变量,然后输入以下代码运行节点。
source devel/setup.bash
rosrun test_pkg Publisher_test
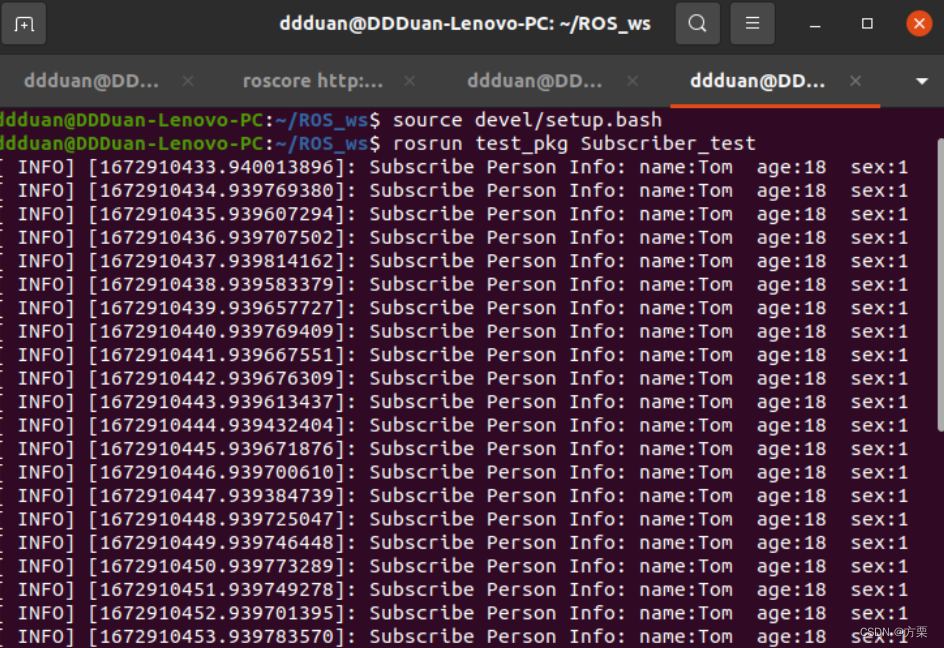
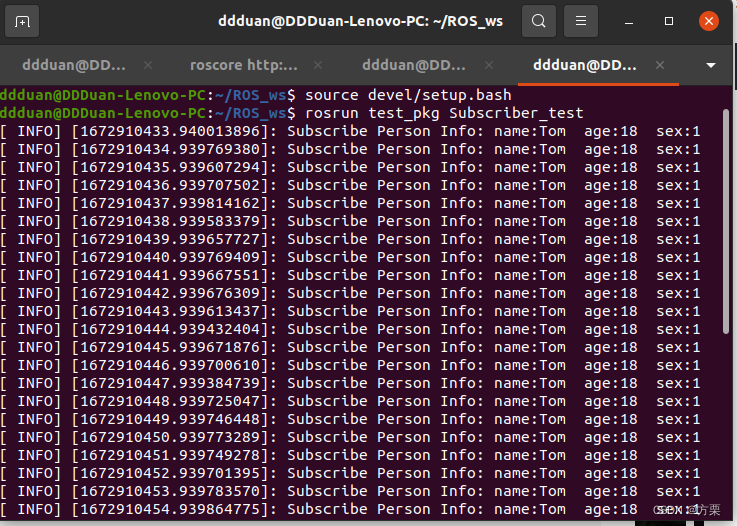
打开一个新的终端,首先配置环境变量,然后输入以下代码运行节点。
source devel/setup.bash
rosrun test_pkg Subscriber_test
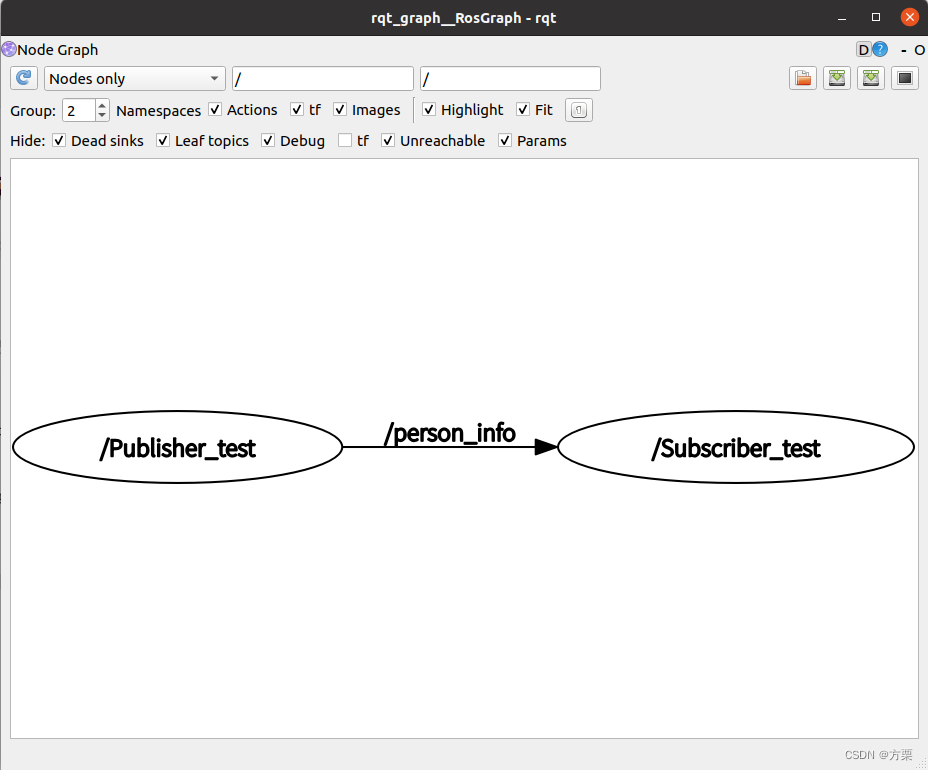
5.话题可视化
打开一个新的终端,输入以下代码。
rqt_graph
由此可以得到如下的基于Qt的GUI界面,直观地看到话题通信的发布订阅节点和消息。
总结
本次实验是进行ROS安装并编程实现话题通信和服务通信。因为其他课程要求,安装了双系统Ubuntu 20.04,因此本次实验就是在Ubuntu20.04下进行,实验中不知为和Terminal无法打开,最终没有办法进入命令模式安装了Xterm,通过Xterm成功运行了Terminal,总的来说,本次实验学习了话题通信和服务通信,收获还是颇多
参考
2021-09-29 使用安卓手机Camera和IMU信息运行ORBSLAM3
ROS 三种通信编程入门:【话题通信】【服务通信】【动作通信】
ROS基础——话题、服务、动作编程
ROS的三种基本通信机制
ROS | 话题通信的编程实现
服务通信的编程实现