目录
一、理论基础
基于Farrow滤波器结构的时间同步算法是一种用于数字通信中的时钟同步技术,可以帮助我们在接收端对传输信号进行时钟同步,以避免由于时钟偏移和时钟抖动引起的接收误差。这种算法基于Farrow滤波器结构,可以在保证高精度的同时,降低计算复杂度,因此得到了广泛的应用。基于Farrow滤波器结构的时间同步算法的核心思想是利用时钟误差对接收信号进行插值和抽取,从而实现对传输信号的时钟同步。具体来说,该算法采用Farrow滤波器结构进行信号处理,该结构基于多项式插值和抽取技术,可以将信号从一个时钟域转换到另一个时钟域,从而实现时钟同步。该算法的基本原理如下:
对接收信号进行采样和量化,得到离散时间域的信号。然后,我们需要对离散时间域的信号进行插值,以获得高精度的时钟同步。在基于Farrow滤波器结构的时间同步算法中,我们通过Farrow多项式插值技术来实现信号的插值。该技术基于拉格朗日插值多项式,可以将信号从一个时钟域转换到另一个时钟域,从而实现时钟同步。具体来说,我们可以将Farrow多项式插值视为一种非线性滤波器,该滤波器可以对信号进行插值,从而实现时钟同步。
对插值后的信号进行抽取,以将信号转换回原始时钟域。在基于Farrow滤波器结构的时间同步算法中,我们通过Farrow多项式抽取技术来实现信号的抽取。该技术基于拉格朗日插值多项式,可以将信号从一个时钟域转换到另一个时钟域,从而实现时钟同步。具体来说,我们可以将Farrow多项式抽取视为一种非线性滤波器,该滤波器可以对信号进行抽取,从而实现时钟同步。
对抽取后的信号进行时钟同步误差估计和校正。在基于Farrow滤波器结构的时间同步算法中,我们可以通过最小二乘法来估计时钟同步误差,并通过反馈控制方式对时钟同步误差进行校正。具体来说,我们可以利用最小二乘法来计算前向误差和反向误差,从而得到时钟同步误差。然后,我们可以通过反馈控制方式对时钟同步误差进行校正,以达到高精度的时钟同步。
基于Farrow滤波器结构的时间同步算法具有以下特点:
(1)高精度:该算法通过Farrow多项式插值和抽取技术,可以实现高精度的时钟同步,从而降低接收误差。

(2)低复杂度:该算法通过Farrow滤波器结构,可以降低计算复杂度,从而实现高效的时钟同步。
(3)适应性强:该算法可以根据不同的接收信号特点,自适应地调整插值和抽取的参数,从而实现更好的时钟同步效果。
(4)鲁棒性强:该算法可以通过反馈控制方式对时钟同步误差进行校正,从而提高算法的鲁棒性。
Farrow结构如下所示:
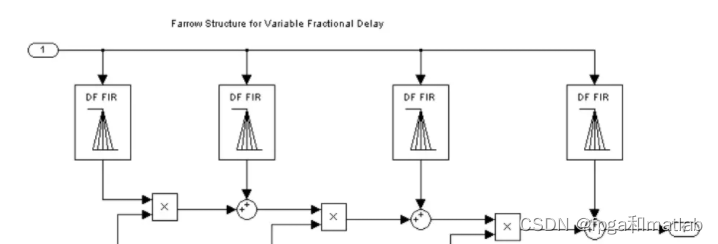
为了计算分数延迟滤波器的输出,我们需要估计现有离散时间样本之间的输入信号值。特殊的插值滤波器可用于计算任意点的新样本值。其中,基于多项式的滤波器特别令人感兴趣,因为一种特殊的结构-Farrow结构-允许简单地处理系数。特别是,Farrow结构的可调谐性使其非常适合实际的硬件实现。
Farrow结构相对于直接形式FIR的优势在于其可调谐性。在许多实际应用中,延迟是时变的。对于每个新的延迟,我们需要在直接形式实现中使用一组新的系数,但在Farrow实现中,多项式系数保持不变。
二、核心程序
............................................................
for K=5,
K
h = remez(L*M,[0 .5/M 1.5/M 1],[1 1 0 0]);
h = h/max(h);
% create the piecewise polynomial approximation to the desired filter
[P e] = construct_farrow(h,L,K);
% the approximated filter is the prototype plus the error
hh = h+e;
% plot the prototype filter
subplot(5,1,1);
plot(h);
hold on;
% overlay the polynomial approximation
plot(hh,'g');
hold off;
% plot the prototype frequency response
[H f] = freqz(h,M,M*np);
subplot(5,1,2);
plot(f,max(20*log10(abs(H)),FLOOR));
hold on;
% overlay the approximated frequency response
HH = freqz(hh,M,M*np);
plot(f,max(20*log10(abs(HH)),FLOOR),'g');
hold off;
% create the input impulse
x = zeros(1,L);
x(1) = 1;
% set the initial conditions
x0 = zeros(1,size(P,1)-1);
t0 = 0;
if 1,
[h t N t0 x0] = asrc_farrow(x,1/M,t0,x0,P);
else,
[h t N t0 x0] = asrc_farrow_loop(x,1/M,t0,x0,P);
end;
% plot the approximated impulse response and overlay the filter output
subplot(5,1,3);
plot(hh);
hold on;
plot(h,'g');
hold off;
% plot the magnitude response
[H,f] = freqz(h/M,1,M*np);
subplot(5,1,4);
% first drop a marker at the original nyquist
plot([pi/M pi/M],[FLOOR 0],'g');
hold on;
% plot dB magnitude with a -60dB floor
plot(f,max(20*log10(abs(H)),FLOOR));
hold off;
% plot the phase response
subplot(5,1,5);
plot(f,angle(H));
hold on;
% zoom in on the passband
plot(f(1:np)*M,angle(H(1:np)),'r');
hold off;
% pause;
end;
up140三、仿真结论
