论文链接:https://arxiv.org/abs/1703.10025
代码链接:https://github.com/msracver/Flow-Guided-Feature-Aggregation
这篇是MSRA发表在ICCV2017上的VID方面的论文,算是之前的工作Deep Feature Flow的一个延续。这篇文章的亮点在于利用了前后帧的信息加强当前帧的特征,从而得到较好的识别精度。但是速度上会比较慢。那我们开始吧。
1.Abstract
视频中的物体检测会受到诸如运动模糊、视频散焦、奇特姿态等的影响。现有的工作尝试从box-level使用temporal信息,但是这种方法不能端到端地进行训练。我们提出了FGFA,在frame-level使用temporal信息。它将相邻帧在motion paths上的特征聚合到当前帧的特征中,因此提高了视频识别的精度。我们的方法极大地提升了ImageNet VID上的single-frame baselines。特别是在识别快速移动的物体方面,此方法和Deep feature flow一起赢得了ImageNet 2017
2.Introduction
物体检测一般都是二阶段结构,首先CNN提取feature map,然后检测特定的网络用于从feature maps 中生成检测结果。
这些方法对于still image效果很好,但是直接用到vedio上效果会恶化很多,例如state-of-the-art RFCN+ResNet-101在对快速运动中的物体进行识别的时候效果恶化得很厉害
然后,视频中拥有丰富的对于单个物体实例的信息,通常会在一小段时间中的多个snapshots看到,这些时间信息用在现有的视频物体检测的方法中,则表现为:首先用物体检测器在单帧上进行检测,然后通过专用的后处理方法将这些bbox组合起来,后处理通常是通过现在的motion estimation的方法,例如光流,物体跟踪等。这些方法不会提高检测质量,性能的提升是来自启发式的后处理而不是有原则的学习过程。对于这类方法没有端到端的学习过程。我们把这些方法叫做box level methods
我们希望能够利用时间信息提升检测或识别的质量,以一种有原则的方式。受图像识别的启发,特征很重要,因此我们利用时间域的聚合提升单帧特征的学习。注意,同一物体的特征用于视频运动的原因,在不同帧是空间不对齐的。盲目的特征聚合可能会使性能变差,这说明在学习过程中对运动进行良好的建模很重要。
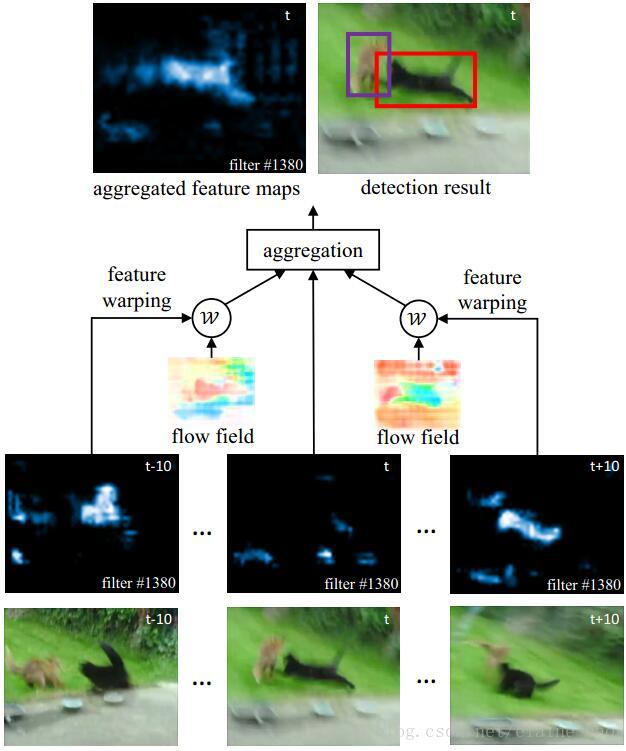
在此工作中,我们提出了FGFA,如图1所示,特征提取的网络在单帧上提取单帧的feature maps,然后为了加强当前帧的特征,一个光流网络用于估计相邻帧和当前帧的运动。相邻帧的feature maps再根据光流运动中warp到当前帧,warp后的feature map以及它自己的feature map一起通过适应权重网络进行聚合。(在当前帧)然后聚合得到的feature map再被送到检测网络中输出当前帧的检测结果。所有模块,包括特征提取,光流估计,特征聚合,检测都是端到端进行训练的,对于快速运动中的物体,普通的方法效果很差,但我们的方法有效地利用了不同snapshot间的丰富表现信息,这也是我们的方法取得VID冠军的致胜点(对于快速运动物体识别好)
3.Flow Guided Feature Aggregation
3.1 Baseline and Motivation
给定输入的视频帧{IiIi},我们的目标是输出所有帧上的物体框{YiYi}。Baseline就是在每帧上单独使用现有的物体检测器。
现有的CNN-based物体检测器结构相似,输入图片I,CNN提取特征得到Nfeat(II)=f feature maps,然后一个专用于detection的子网络用于生成检测结果yy=Ndet(ff)。
视频帧会有很剧烈的表现变化,如图2所示,当画面很差的时候,单帧的检测结果很不稳定,易出错。图1给出了一个例子,在tt时刻,由于运动模糊,猫这个类的特征响应会很低。这导致单帧检测的失败,观察到邻近的帧tt-10和tt+10有比较高的响应,它们的特征可以被传递给当前的tt帧,当tt帧的特征加强后,检测成功。 
特征传递和加强需要两个模块实现:(1)motion-guided spatial warping.在帧间估计运动然后将feature map进行warp。(2)feature aggregation module.它用于正确地将不同帧的特征进行融合,再加上特征提取和检测网络,共同组成了我们方法的四个模块。
3.2 Model Design
Flow-guided warping.给定一帧{IiIi}和其相邻帧{IjIj}光流场Mi−>jMi−>j=F(IiIi,IjIj)可以通过光流网络F参加FlowNet[8]估计。
相邻帧的feature maps被warp到当前帧,根据光流warping function定义为:
fj−>ifj−>i=W(fjfj,Mi−>jMi−>j)=W(fjfj,Mi−>jMi−>j)
其中W是一个双线性的warping function,用于feature maps上所有位置的每个channel,fj−>ifj−>i表示从jj warp到ii帧的feature map。
Feature aggregation.做完feature warping以后,当前帧从相邻帧累积feature map。这些feature map提供了物体实例的不同信息,例如光照、视角、姿态、非刚体变形等。聚合特征是,我们在不同空间位置使用不同的权重,并且让所有特征通道共享此空间权重,这一2D权重map定义为Wj−>iWj−>i。则聚合后的特征为 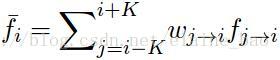
其中kk表示相邻帧的数量,默认kk=10。上式和attention模型的公式很像,不用的权重用于memory buffer中的不同特征。
聚合后的特征

和baseline以及box-line method相比,我们的方法在输入到最后的检测之前就进行了多帧信息聚合。
Adaptive weight.权重用于表示所有buffer frames[Ii−kIi−k,…,Ii+kIi+k]对于IiIi在每个空间位置上的重要程度。
特别地,在位置PP,如果warped features fj−>i(P)fj−>i(P)和fi(P)fi(P)很相近,则它会被赋予一个大的权重,反之则相反这里我们使用余弦相近矩阵来衡量warped features和从当前帧得到的features之间的相似度。另外,我们不直接使用卷积特征Nfeat(II),而是使用一个小的全卷积网络
我们估计权重为: 
其中fefe=
3.3 Training and Inference
Inference.算法1归纳了inference的过程。 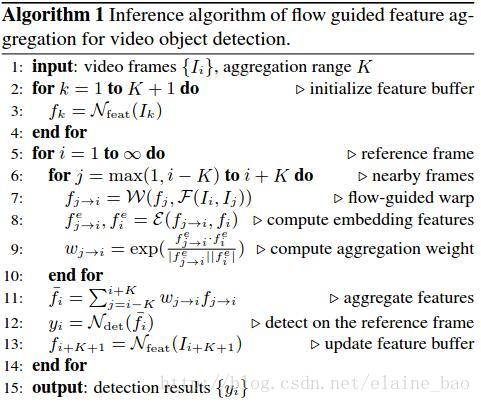
Training.整个FGFA结构是可微的,可以端到端地进行训练。唯一需要注意的地方是特征warping的模块是通过双线性插值得到的,也是可微的,对于feature maps和光流场都是可微的。
*Temporal dropout.在SGD训练中,聚合范围K受到内存的限制,我们在inference的时候使用一个大的K,而在训练的时候用小的K(默认为2),这是没关系的,因为adaptive weight可以在许梿和推理的时候分别进行正确的归一化。注意在训练时,相邻帧是从一个大的range中随机采样的,这个大range等于推理时用的range,这就相当于在时域上用了个dropout,用table 3可以看出,temporal dropout效果不错。

3.4 Network Architecture
Flow network.我们用了在flying chairs数据集上预训练的Flownet(简易版)。它被使用到一半分辨率的图片上。输出stride=4。由于feature network的输出stride=16(下文有解释)。flow field再次下采样得到和feature map一样的分辨率。
Feature network.我们使用Resnet-50,Resnet-101。Inception-Resnet作为feature network。初始的Inception-Resnet是用于图像识别的,为了解决特征不一致的问题,使其能够正确运用到物体检测中,我们使用一个modified的版本叫做Aligned-Inception Resnet[6]、Resnet50,Resnet101,Aligned-Inception-Resnet都是在ImageNet分类上预测训练的。
预测训练的模型用于FGFA的feature network。我们稍微调整了一下这三个模型的结构用于物体检测。我们将最后的average pooling和fc层去掉,保留其他卷积层。为了提高特征分辨率,根据[4,5]的实践,将最后一个block的stride从32改为16,特别地,在最后一个block的开始(conv5),stride从2变为1。为了保持感受野的大小。最后一个block的卷积层的dilation(kernel size>1)设为2。最后随机初始化3*3卷积用在最后将特征维度降为1024。
Embedding network.有三层,1*1*512 conv,3*3*512 conv,1*1*2048 conv,随机初始化。
Detection network.我们使用R-FCN,并且按照[49]的设计,在1024-d feature maps的后面。RPN sub-network和R-FCN sub-network分别接前512和后512维,RPN使用9个anchor(3 scale, 3 aspect)。每张图产生300个proposals,R-FCN中的position-sensitive score maps是7*7group。
4.Experiment
4.1 Experiment Setup
**ImageNet VID dataset.**3862个video snippets用于训练,555个snippets用于验证,这些snippets全部标注好。每个视频的frame rates在25和30左右。共有30个物体分类,是ImageNet DET数据集的子类别。
slow,medium和fast运动中分别测试了不同运动速度的map。
Implementation Details.在训练时,和[18,23]一样,ImageNet DET和VID训练集都用于训练。两阶段的训练:第一阶段:特征网络和检测网络在ImageNet DET上进行训练,使用和VID一样的30个类,SGD,每个batch一张图进行训练,4GPU,120K iterations。lr在前80K和后40K iters分别为10−310−3和10−410−4。第二阶段,整个FGFA模型在VID上进行训练,4GPU,60K iter。lr在前40K和后20K iters分别是10−310−3和10−410−4。在训练和推理中,图片都被resize到短边600用于feature network,resize到短边300用于flow network。
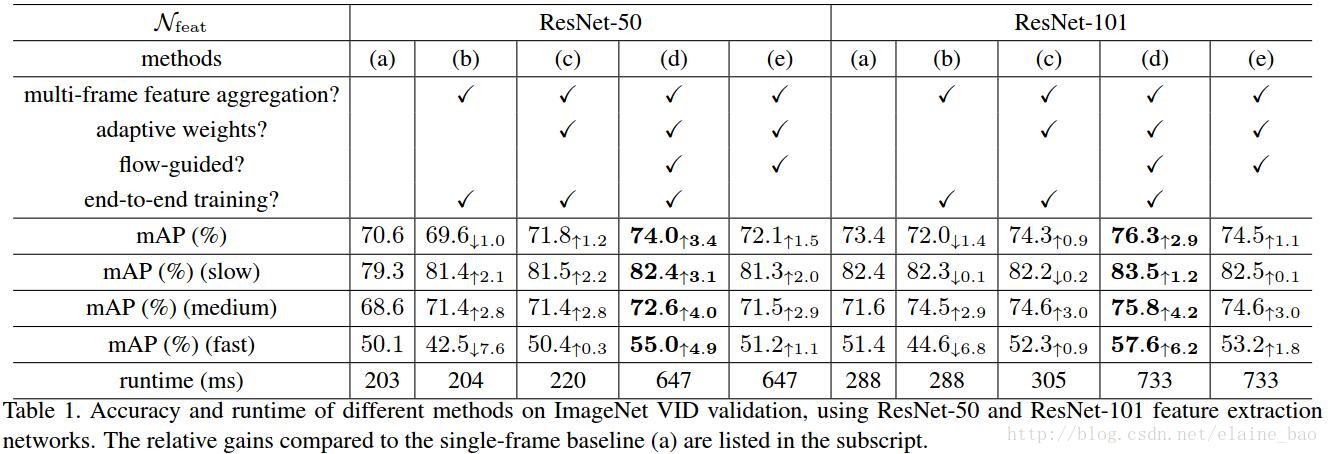
4.2 Ablation Study
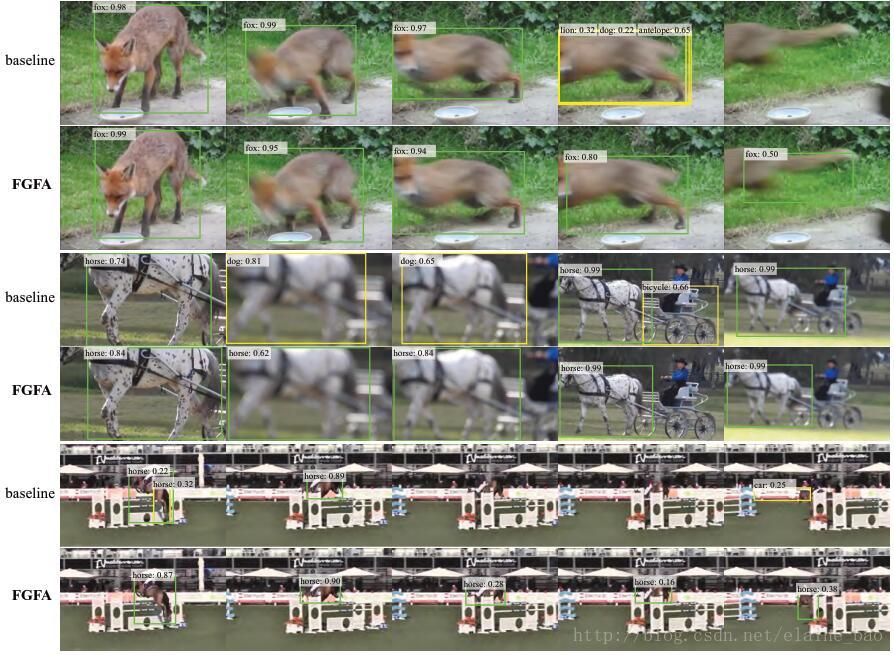
Table 1比较了单帧baseline 和FGFA以及其变种figure 6是单帧方法和FGFA的直观对比。