Gram-Schmidt正交化
在前面的几个最小二乘的文章中,实际上已经看到Gram-Schmidt正交化的影子。在我个人看来,Gram-Schmidt正交化更像是最小二乘的一个快速算法。下面,我会接着上一篇文章中的最后一个例子讲,慢慢引出Gram-Schmidt的想法 ——> 那就是如何“改写”矩阵A中的列向量? 最大程度简化最小二乘的求解过程。
在上一篇文章的最后一个例子中,给出了和不为0的三个时间点t=(1,3,5)的直线拟合问题b=C+Dt(先不考虑三个时间点所对应的值b)。当时,为了让正规方程更好解,通过把t减去他的均值3,得到T=t-3=(-2,0,2),实现了最小二乘解
的快速求解(不再是简单的通过套用公式
来计算,而是直接求解正规方程,这也避免了求
的逆,这种精度误差较大的运算)。
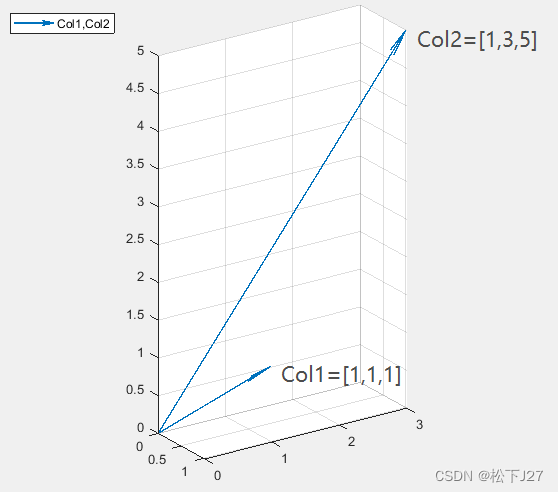
首先,对于三个数据点(t1=1,b1=1),(t2=3,b2=2),(t3=5,b3=4)而言,对应的矩阵A为:
由矩阵A的两个列向量的内积不为0,不正交
如下图所示:
Matlab code:
close all
clear all
%时间t=[1 3 5]不在0的两侧,A中的两个列向量不正交,生成的A'A不是主对角线左右两边都是0的对角阵
A=[1 1 1;1 3 5]'
b=[1 2 4]'
col1=A(:,1)
col2=A(:,2)
col1'*col2
A'*A
%plot
X=[0,0];
Y=[0,0];
Z=[0,0];
U=[1,1];
V=[1,3];
W=[1,5];
quiver3(X,Y,Z,U,V,W,0,'LineWidth',1)
axis equal
legend('Col1,Col2','Location','northwest') 不是对角阵,此时,
需要通过公式
来计算。
补充:
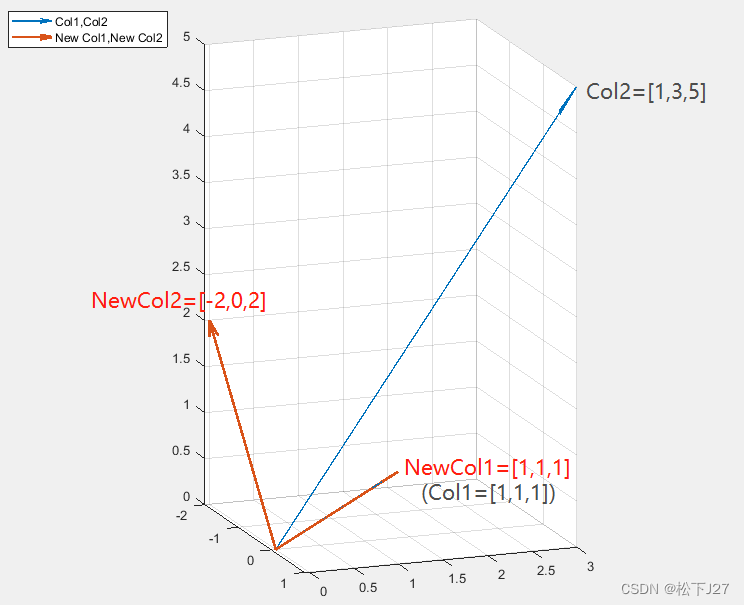
后面,我们为了让变成对角阵,把t=(1,3,5)变成了T=(-2,0,2), 矩阵A变成了:
两个列向量的内积为0,正交
如下图所示:
Matlab code:
%时间t=[-2 0 2]位于0的两侧对称,A中的两个列向量彼此正交,A'A可以生成主对角线左右两边都是0的对角阵
A=[1 1 1;-2 0 2]'
col1=A(:,1)
col2=A(:,2)
col1'*col2
A'*A
%plot
Q1=[1,-2];
Q2=[1,0];
Q3=[1,2];
hold on
quiver3(X,Y,Z,Q1,Q2,Q3,0,'LineWidth',2)
legend('Col1,Col2','New Col1,New Col2','Location','northwest') 变成了对角阵:
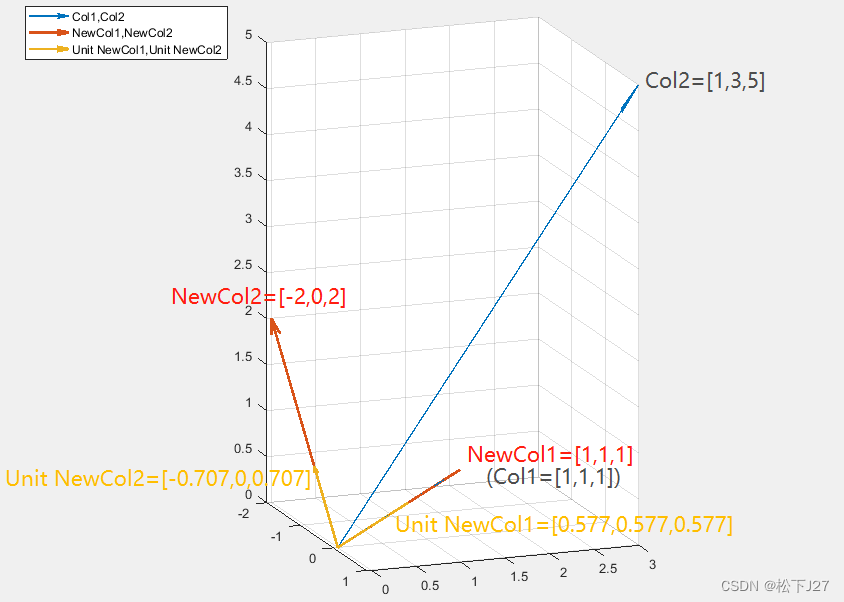
更进一步,如果我们把A中的两个彼此正交的列向量(orthogonal vectors)都变成单位正交向量(orthogonal unit vectors),则会从对角阵变成单位矩阵I。把一个向量变成单位向量的办法是除以这个向量自身的长度。
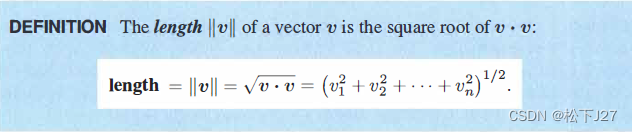
根据向量长度的计算公式,列向量col1的长度为,col2的长度为
,归一化后有:
内积为0,彼此正交:
如下图所示:
Matlab code:
%把矩阵A中的两个相互正交的列向量变成单位向量,这样一来,A也变成了标准正交矩阵
Length_Col1 = sqrt(sum(col1.^2));
Length_Col2 = sqrt(sum(col2.^2));
col1_unit=col1./Length_Col1
col2_unit=col2./Length_Col2
A_unit=[col1_unit col2_unit]
% check:对于标准正交矩阵而言,有A'A=I
A_unit'*A_unit
%plot
Q1=[1/Length_Col1,-2/Length_Col2];
Q2=[1/Length_Col1,0/Length_Col2];
Q3=[1/Length_Col1,2/Length_Col2];
hold on
quiver3(X,Y,Z,Q1,Q2,Q3,0,'LineWidth',2)
legend('Col1,Col2','NewCol1,NewCol2','Unit NewCol1,Unit NewCol2','Location','northwest')得到单位化后的新矩阵:
和新的方程:(注意:为了维持原方程组Ax=b中的A变成
后,方程左右两边保持不变,原方程中的x也要改,变成
)
用这个新矩阵去计算正规方程右边的
,得到单位矩阵I:
正规方程左边:
新的正规方程,看一眼就能得到答案,因为为单位矩阵,使得原来的正规方程变成:
最终得到的答案和之前一样:
在本例中,归一化后的两个相互正交的列向量和
是一组标准正交基。
Matlab code:
%% 用简化后的公式计算正规方程的解
%x=Q'b
x=A_unit'*b
x_new=[x(1)/sqrt(3); x(2)/sqrt(8)]
%P=QQ'
P=A_unit*A_unit'
%projection p=QQ'b
p=P*b标准正交基(Orthonormal Bases)
现在,我们给出关于标准正交基Orthonormal的正式定义:
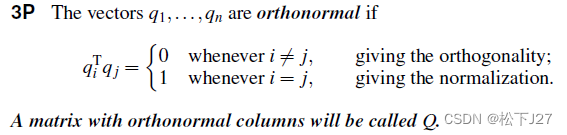
如果一组列向量,他们满足彼此之间的内积为0(正交性),且,他们的长度都为1(归一化)。则,我们把这样的一组列向量称为标准正交基Orthonomal。同时,我们也把由标准正交基组成的矩阵用大写的英文字母Q来表示。
对于标准正交基而言,一个最常见的例子就是x-y二维坐标系。x轴和y轴不仅相互垂直,坐标轴上的每一个刻度都是该轴所对应的单位向量的长度的倍数(如果用q1=(1,0)表示x轴的单位向量,用q2=(0,1)表示y轴的单位向量的话)。q1和q2共同组成了一个2x2矩阵Q,这是一个2x2的单位矩阵。
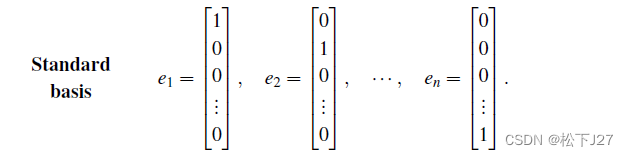
对于n维空间,同样有n个坐标轴e1,e2,....en,他们也是一组标准正交基,且他们所组成的矩阵Q也是一个单位阵。
标准正交矩阵(Orthogonal Matrices)
我们把用标准正交基q1,q2...qn所组成的矩阵称为标准正交矩阵Q,Q可以是方阵也可以不是方阵。且,。
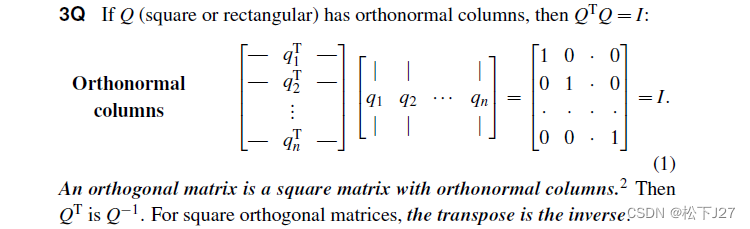
如果标准正交矩阵Q是一个方阵的话,则有:
也就是说,如果方阵Q是一个标准正交矩阵,则方阵Q的转置就是Q的逆矩阵。
![]()
例:任何置换矩阵P(permutation)都是一个标准正交矩阵。

上图的两个置换矩阵,分别交换了(x,y,z)的位置和交换了(x,y)的位置。因为,这两个置换矩阵P的列向量都是单位向量,且彼此两两正交。所以也是标准正交矩阵。
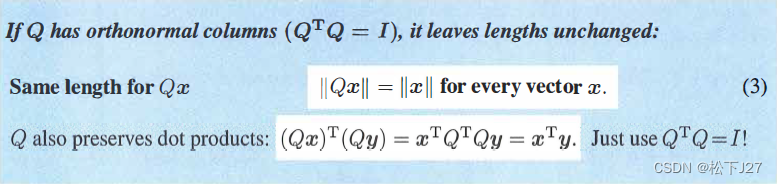
最后,在这里补充一条标准正交矩阵Q的又一条重要性质,即,用一个标准正交矩阵Q去乘一个任意向量都不会改变这个向量的长度。(书上上,这一性质还挺重要的,只是我暂时没发现)
标准正交矩阵的投影与最小二乘
对于一个mxn的矩阵A,如果矩阵A中的列向量都彼此正交,且向量长度都是1。则A是一个标准正交矩阵。若方程组Ax=b无解,则需要根据最小二乘的计算公式分别计算和
。但如果A是标准正交矩阵Q的话,或者说,如果我们先把矩阵A变成标准正交矩阵的话,就能极大的简化最小二乘的计算。

第一:他极大地简化了正规方程的表达式,同时,直接给出了最小二乘解。
 (正规方程)
(正规方程)
第二:他简化了所有包含的计算,同时,更重要的是他也避免了求
的逆。
 (投影)
(投影)
 (投影矩阵)
(投影矩阵)
标准正交矩阵Q所带来的影响,并不仅仅体现在简化计算公式上,在投影的几何表示上也有相应的体现。当A为正交矩阵Q时,向量的投影()可写成在每一个列向量上的投影的和的形式:
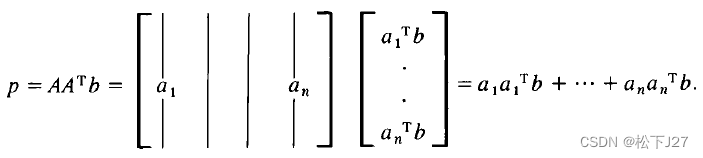
其中:
依此类推。。。
令b=(b1,b2,...,bn),则有:
依此类推。。。
用几何图像来表示就是:
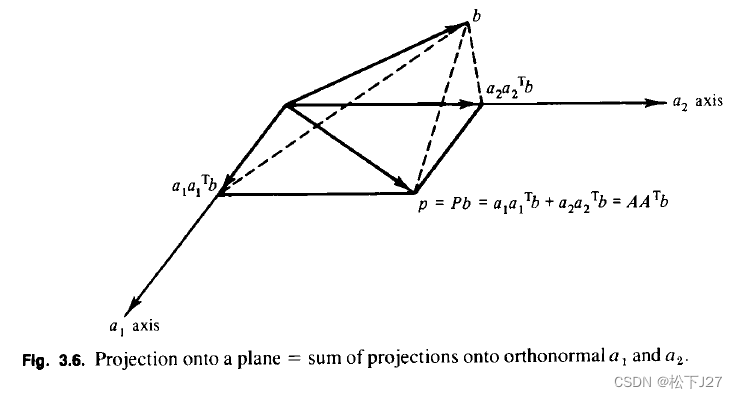
也就是说,向量b在A所张成的列空间上的投影p等于,b在每个坐标轴上的投影的和。
此外,当A为标准正交矩阵时(当A为方阵时,m=n),A中的列向量可以张满整个。A中的每个列向量,实际上就是n维正交坐标系中的每个轴所对应的单位向量。对于
中的任意一个向量b,b在A的列空间内,所以可以写成Ax=b的形式,x中的每个元素都是A中各列所对应的权重。当A为Q时,我们把Qx=b写成如下形式:
![]()
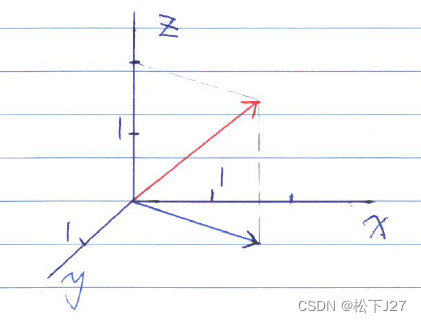
q1,q2,...,qn分别表示n维坐标系中的每个坐标轴上的单位向量,这样一来,上式所表示的就是,在n维直角坐标系中,任意一个向量b等于,他在q1轴,q2轴,。。。qn轴上分量的和。
例如:

当x=1.5,y=1,z=2时有。
小结:
1, 给定的mxn方程组 Ax=b 无解
2, 左右两边同时乘以,得到正规方程
3, 求解正规方程,得到
4, 若A是一个标准正交矩阵Q,则改Ax=b为Qx=b
5, 左右两边同时乘以,得到新的正规方程
6, 极大的简化了原来
计算,得到
7, 与此同时,也简化了投影p的计算,得到
(全文完)
作者 --- 松下J27
参考文献(鸣谢):
1,Introduction to Linear Algebra,Fifth Edition - Gilbert Strang
2,线性代数及其应用,候自新,南开大学出版社 1990
3,Linear Algebra and Its Applications, Second Edition, Gilbert Strang, 1980
4,Linear Algebra and Its Applications, Fourth Edition, Gilbert Strang, 2005
增加了插图和对应的matlab代码,2023/05/24

(配图与本文无关)
版权声明:文中的部分图片,文字或者其他素材,可能来自很多不同的网站和说明,在此没法一一列出,如有侵权,请告知,立即删除。欢迎大家转载,但是,如果有人引用或者COPY我的文章,必须在你的文章中注明你所使用的图片或者文字来自于我的文章,否则,侵权必究。 ----松下J27