目录
摘要 1
第一章 机械手设计任务书 1
1.1毕业设计目的 1
1.2本课题的内容和要求 2
第二章 抓取机构设计 4
2.1手部设计计算 4
2.2腕部设计计算 7
2.3臂伸缩机构设计 8
第三章 液压系统原理设计及草图 11
3.1手部抓取缸 11
3.2腕部摆动液压回路 12
3.3小臂伸缩缸液压回路 13
3.4总体系统图 14
第四章 机身机座的结构设计 15
4.1电机的选择 16
4.2减速器的选择 17
4.3螺柱的设计与校核 17
第五章 机械手的定位与平稳性 19
5.1常用的定位方式 19
5.2影响平稳性和定位精度的因素 19
5.3机械手运动的缓冲装置 20
第六章 机械手的控制 21
第七章 机械手的组成与分类 22
7.1机械手组成 22
7.2机械手分类 24
第八章 机械手Solidworks三维造型 25
8.1上手爪造型 26
8.2螺栓的绘制 30
毕业设计感想 35
参考资料 36
第一章 机械手设计任务书
1.1毕业设计目的
毕业设计是学生完成本专业教学计划的最后一个极为重要的实践性教学环节,是使学生综合运用所学过的基本理论、基本知识与基本技能去解决专业范围内的工程技术问题而进行的一次基本训练。这对学生即将从事的相关技术工作和未来事业的开拓都具有一定意义。
其主要目的:
一、培养学生综合分析和解决本专业的一般工程技术问题的独立工作能力,拓宽和深化学生的知识。
二、培养学生树立正确的设计思想,设计构思和创新思维,掌握工程设计的一般程序规范和方法。
三、培养学生树立正确的设计思想和使用技术资料、国家标准等手册、图册工具书进行设计计算,数据处理,编写技术文件等方面的工作能力。
四、培养学生进行调查研究,面向实际,面向生产,向工人和技术人员学习的基本工作态度,工作作风和工作方法。
1.2本课题的内容和要求
(一、)原始数据及资料
(1、)原始数据:
a、生产纲领:100000件(两班制生产)
b、自由度(四个自由度)
臂转动180º
臂上下运动 500mm
臂伸长(收缩)500mm
手部转动 ±180º
(2、)设计要求:
a、上料机械手结构设计图、装配图、各主要零件图(一套)
b、液压原理图(一张)
c、机械手三维造型
d、动作模拟仿真
e、设计计算说明书(一份)
(3、)技术要求
主要参数的确定:
a、坐标形式:直角坐标系
b、臂的运动行程:伸缩运动500mm,回转运动180º。
c、运动速度:使生产率满足生产纲领的要求即可。
d、控制方式:起止设定位置。
e、定位精度:±0.5mm。
f、手指握力:392N
g、驱动方式:液压驱动。
(二、)料槽形式及分析动作要求
( 1、)料槽形式
由于工件的形状属于小型回转体,此种形状的零件通常采用自重输送的输料槽,如图1.1所示,该装置结构简单,不需要其它动力源和特殊装置,所以本课题采用此种输料槽。
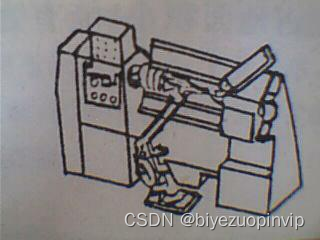
图1.1机械手安装简易图

























