一、什么是无人机
无人机是一个很大的概念,百度百科上的介绍为“无人驾驶飞机简称“无人机”(“UAV”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人固定翼飞机、无人垂直起降飞机 、无人飞艇、无人直升机、无人多旋翼飞行器、无人伞翼机等。与载人飞机相比,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。”,甚至可以说,非载人的可以在空中持续移动的机器都算无人机,但是我们限定一下概念范围,在这里我们只讨论多旋翼,固定翼的飞行器,本教程内无人机指的是多旋翼(四旋翼、六旋翼)和固定翼的飞行器。
同时,注意一下无人机与航模的区别,无人机指的是不需要人来驾驶(自动飞行)的飞行器,航模指的是需要人工遥控的飞行器,这是两者主要的区别。
二、什么是飞控、机载计算机
1.飞控介绍
飞控又称飞行控制器、自动驾驶仪,是用于在起飞、巡航、降落等阶段辅助或全自主对飞行器的其他系统及元器件起到协同控制的元件。简单来说,飞控就是实现无人机底层控制的东西,什么是底层控制?底层控制就是动力输出(怎么将动力分配到多个旋翼上),稳定飞行(受到干扰怎么维持稳定)这些,可以比作人的小脑。因为类比人的移动,需要小脑和各自肌肉以及各种神经来实现具体运动,与思考相对独立,毕竟人的大脑最多思考要干什么,而不会去具体思考每一块肌肉怎么运动,同样想要实现无人机的完整智能,一个需要依赖无人机的稳定运动,一个需要无人机的感知决策,前者等同人的肌肉与小脑,后者类比人的感官与大脑。
目前主流的飞控有国外的Pixhawk,国内的雷迅CUAV,匿名科创,ACFly等等,不同飞控的区别类似于不同品牌手机的区别。
同时注意一下,飞控本质上就是特殊设计的32单片机(当然有一些可能是其他单片机,但是依然是单片机范围),带有无人机飞行所必备的模块,如IMU,气压计等,同时飞控可以接入其他模块来实现更多功能,如加入GPS模块可以实现GPS巡航,加入光流模块可以在特定情况下增强稳定性等。
不过,学过单片机的同学都知道,单片机需要烧录程序才可以运行,飞控作为单片机自然不例外,其烧录的程序称为飞控程序(也可以叫飞控软件),实际上,飞控程序就是处理无人机飞行时的数据并且进行控制的程序,由于无人机飞行的复杂性,所以飞控程序也十分复杂,所幸我们无需自己编写,可以直接使用开源的飞控程序或者闭源。
在这里解释一下开源和闭源的区别,开源就是开放源代码,所有人都可以浏览并且修改,闭源就是不开放源代码,大疆无人机就是不开放源代码的例子,只不过大疆的无人机虽然性能好,但是因为不开放源代码和价格较贵的原因,不建议大家使用。(PS:带有二次开发这种功能的大疆无人机貌似几万一个)
目前,主流的飞控程序有PX4、FMT、APM等,但是为了方便我们后面实现自主飞行与避障,我们这里选择PX4或者FMT飞控程序,至于匿名科创、ACFly这些飞控,只适合完成本科阶段的无人机相关竞赛,难以实现真正的自主飞行与避障,所以我们这里不建议大家使用。
在这里我们解释一下为什么这么说,因为飞控就是小脑,机载电脑就是大脑,大脑小脑之间需要通信,但是这个过程稍微有些复杂,所以需要支持这种复杂通信协议的飞控来完成(实际上就是支持mavros与mavlink的飞控与飞控软件,这些名词后面我们会解释,大家只需要理解为特殊通讯方式即可),但是ACfly和匿名等飞控并不支持这种,并且无法完成仿真功能(仿真简单来说就是模拟真实世界中无人机飞行的方式,可以测试你的程序是否合理,不然直接放在真实无人机上的话,可能直接导致飞机坠毁),所以为了更高的上限,我们不选择这些飞控,而是选择PX4/FMT飞控程序与相匹配的飞控。
2.机载计算机介绍
机载计算机顾名思义就是安装在无人机上的计算机,有体积小,功耗低,性能强大等特点,在上面运行程序,可以实现无人机的智能控制与自主决策,弥补了飞控无法进行高级开发的缺点,机载计算机目前主流有树莓派,Jetson等,搭载Ubuntu系统,使用ROS等框架和库,连接飞控,进行无人机的智能控制与自主决策,这里机载计算机就是无人机的大脑,也可以叫上位机。
三、无人机硬件组成与结构介绍
首先,我们从无人机的实物开始解剖无人机的组成与结构

1.机架
机架是无人机的骨架,承载无人机所有电子设备,如图,所有的电子设备都是固定在机架上才可以正常运行的。机架大小以轴距进行区分,450型号指对角线上两个电机轴的距离为450mm,机架越大,需要的电机功率越大,桨叶也越大,否则无法起飞;机架目前主要是塑料、碳纤维两种,碳纤维机械性能好,但是价格更贵。
2.桨叶
桨叶是专门型号的,根据物理原理,桨叶的转动惯量(相对转轴)与半径的五次方成正比(近似),所有大桨叶响应慢,不容易改变运动状态(即转速),同时桨叶分正反转向,因为单个螺旋桨由电机带动旋转时会产生一个力使得无人机沿中轴线水平旋转,所以需要设置不同螺旋桨为不同转向来抵消,否则多旋翼无人机会在起飞之后持续旋转,不过基于这个原理,可以用转速控制无人机的偏航运动
一般来说,小桨高转速有益于增稳,飞机可以飞行的更稳,但是续航表现会更差
3.电机
电机为专用三相无刷电机,三个接线端子(没有正负极之分,只需将任意两个端子反接即可实现反向转动),单向转动,功率大,摩擦小,可以提供非常大的升力。电机的kv值指的是在1v电压下,空载电机每分钟的转速,380kv的电机指的是1v电压下,电机空载每分钟转380圈。
同系列同外形尺寸的无刷电机,根据绕线匝数的多少,会表现出不同的KV特性。绕线匝数多的,KV值低,最高输出电流小,扭力大;绕线匝数少的,KV值高,最高输出电流大,扭力小。
但是电机不是kv值越大越好,在功率相同情况下,kv值越大,电机提供的力矩越小,所以高kv值的电机配小桨叶,低kv值的电机配大桨叶,比如380kv的电机一般装载16寸直径桨叶,980kv的电机装载10寸直径桨叶,更高kv的电机会装备6寸、4寸的小桨叶甚至作为涵道电机(涵道是固定翼飞行器也就是战斗机外形的飞行器所有的,向后推进)
4.电调
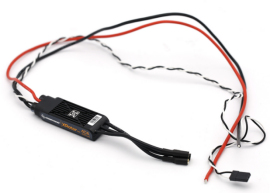
电子调速器(简称ESC)是接受PWM控制信号并且控制电机转速的电子设备,可以接受来自于Pixhawk或者信号接收器的PWM信号,然后控制电机旋转,目前多旋翼无人机一般使用好盈品牌,多旋翼主要使用乐天型号(专门为多旋翼设计),如图所示,电调有三种线,三个黑色的圆形头(称为香蕉头,如上面第二个图所示)接无刷电机,不分正反,任意反接两个接口即可让电机反向转动;然后是长的粗黑线红线,接的是供电电源,黑色接地(负极),红色接Vcc(正极),千万不能接反,否则会在接通电源的时候会烧坏电调;最后是缠绕在一起的黑白线,这是新号线,接受控制信号并且控制电流,其中黑色为地线,白色为信号线,接信号接收器或者飞控输出端

5.电流计
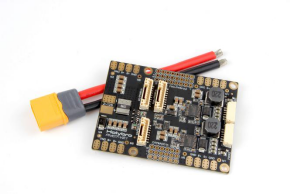
电流计并不是显示电流大小的传感器,是给飞控供电的模块,接入高压的锂电池,然后输出稳定的电压驱动飞控,Pixhawk4的电流计(如图)更是集成了更多功能,可以成为给电调供电的枢纽(相当于分线板),飞控的转接板(把飞控多个引脚引出,有助于飞控减小体积)
6.电池
无人机动力来源,无人机专用的电池,放电功率大,放电效率高,1S代表有一节锂电池串联(无人机用的都是串联起来的锂电池),例如3s电池就是三节锂电池串联;无人机越大,一般需要的电压越高,如450的无人机一般用3S或者4S锂电池,680的会使用6S锂电池,超大的无人机(比如说轴距1000以上的)可能使用12s的锂电池;每一节锂电池的满电电压为4.2V,空电电压为3.7V,所以电池到达最大电压(节数4.2V)时即为充电完成,到达最低电压时(节数3.7V)就不应该再使用