现有的声源定位算法可大致分为三类:a)基于时延估计(time-delay estimation,TDE)的算法;b)基于高分辨率谱估计的算法;c)基于稀疏表示的算法。
基于TDE的算法核心在于对传播时延的准确估计,一般通过对麦克风间信号做互相关处理得到。进一步获得声源位置信息,可以通过简单的延时求和、几何计算或是直接利用互相关结果进行可控功率响应搜索等方法。这类算法实现相对简单,运算量小,便于实时处理,因此在实际中运用最广。
GCC-PHAT
基于广义互相关函数的时延估计算法引入了一个加权函数,对互功率谱密度进行调整,从而优化时延估计的性能。根据加权函数的不同,广义互相关函数有多种不同的变形,其中广义互相关-相位变换方法(Generalized Cross Correlation PHAse Transformation,GCC-PHAT)方法应用最为广泛。GCC-PHAT方法本身具有一定的抗噪声和抗混响能力,但是在信噪比降低和混响增强时,该算法性能急剧下降。
1、计算传播时延
阵列中两个麦克风的接收信号为:
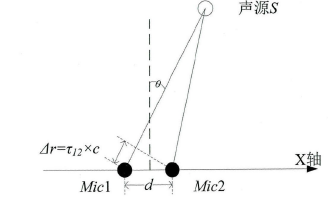
相关参数可参见下图:
互相关算法经常被用来做时延估计,表示为:

代入信号模型,则有:

此时因为s(t)和n1(t)互不相关,上式可以简化为:

其中τ12=τ1-τ2,假设n1和n2是互不相关的高斯白噪声,则上式可以进一步简化为:

由相关函数的性质可知,当τ12=τ1-τ2时,Rx1x2(τ)取最大值,是两个麦克风之间的时延。
互相关函数和互功率谱的关系:
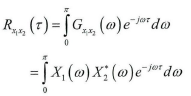
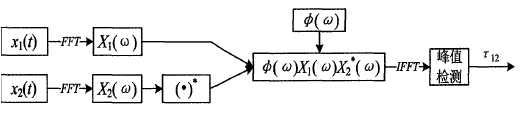
在麦克风阵列信号处理实际模型中,由于存在混响和噪声影响,导致Rx1x2(τ)的峰值不明显,降低了时延估计的精度。为了锐化Rx1x2(τ)的峰值,可以根据信号和噪声的先验知识,在频域内对互功率谱进行加权,从而能抑制噪声和混响干扰。最后进行傅里叶逆变换,得到广义互相关函数Rx1x2(τ):
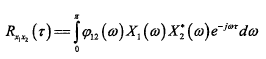
其中φ12(w)表示频域加权函数。广义互相关时延估计算法框图如下:
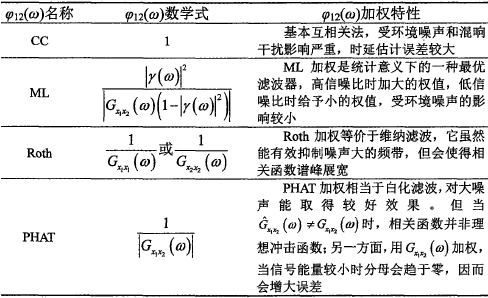
2、常用加权函数及其特点
相位变换加权函数的表达式为:
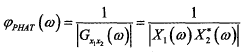
由上式可知,相位变换加权函数实质上是一个白化滤波器,使得信号间的互功率谱更加平滑,从而锐化广义互相关函数。经过PHAT加权之后,Rx1x2(τ)广义互相关函数的表达式为:
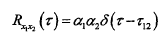
可以看出,经过PHAT加权的互功率谱近似于单位冲激响应的表达式,突出了时延的峰值,能够有效抑制混响噪声,提高时延估计的精度和准确度。
3、互相关函数
x(n)和y(n)的互相关函数是将x(n)保持不动, y(n)左移m个样本点,两个序列逐个相乘的结果,顺序不能互换。但是,按照时域卷积的方式求互相关函数的方法计算复杂度较大,所以将在频域进行操作(FFT和IFFT),即线性卷积的FFT算法。
两个信号的互相关函数的频域等于x信号频域的共轭乘以Y信号的频域.